1.本实用新型涉及一种陶瓷坯转移装置,更具体地说涉及一种能够根据不同尺寸陶瓷坯调节升降距离以实现陶瓷坯沿着转移装置周向间歇式运动,依次递进地按顺序给陶瓷坯转换工位的陶瓷坯转移机械手。
背景技术:
2.陶瓷坯的加工过程中,需要依次将陶瓷坯从一个工位转移到下一个工位。陶瓷坯的夹持转移设备通常采用专用夹持单元夹住陶瓷坯并采用转移装置完成陶瓷坯的转移。
3.但是,通常上述这种传统夹持转移设备仅适用于某一尺寸的陶瓷坯,尤其是某一高度的陶瓷坯。一旦陶瓷坯的尺寸发生变化,尤其是高度发生较大的变化,就需要对设备进行调节,否则就容易在夹持并转移陶瓷坯的过程中,因为施加的力偏离陶瓷坯的重心,因此容易对陶瓷坯造成伤害。
4.但是,上述这种夹持转移设备需要生产者停机并对所有专用夹持单元的高度进行调节,操作非常麻烦。
技术实现要素:
5.本实用新型的目的,是提供一种陶瓷坯转移机械手,这种陶瓷坯转移机械手能够根据不同陶瓷坯的尺寸快速调节所有夹持单元的高度。采用的技术方案如下:
6.一种陶瓷坯转移机械手,其特征在于:包括机架、升降机构、可转动支撑装置和至少一个夹持单元,升降机构安装在机架上,可转动支撑装置安装在升降机构上,夹持单元安装在可转动支撑装置外侧壁上;所述升降机构为丝杆升降机,丝杆升降机具有丝杆、升降支撑台,升降支撑台安装在丝杆顶端,可转动支撑装置安装在升降支撑台上,机架上安装有多条轨道,可转动支撑装置具有多条支撑腿,支撑腿与轨道两者数目相同并且一一对应,各支撑腿底端分别可滑动地安装在对应的轨道上。
7.较优的方案,所述可转动支撑装置还包括凸轮分割器、可转动架,凸轮分割器安装在升降支撑台上,可转动架安装在凸轮分割器上,各支撑腿固定在可转动架上。
8.较优的方案,所述支撑腿与轨道两者数目均为四个,各轨道沿着机架的周向依次均匀分布。
9.较优的方案,所述夹持单元的数目为四个,四个夹持单元分别安装在可转动架上并且四个夹持单元分别沿着可转动架的周向依次均匀分布。
10.本实用新型对照现有技术的有益效果是,由于设有丝杆升降机,因此能够根据不同陶瓷坯的尺寸快速调节所有夹持单元的高度,从而满足实际生产的需求;而支撑腿与轨道相互配合,使得转动支撑装置的升降运动更加平稳。
附图说明
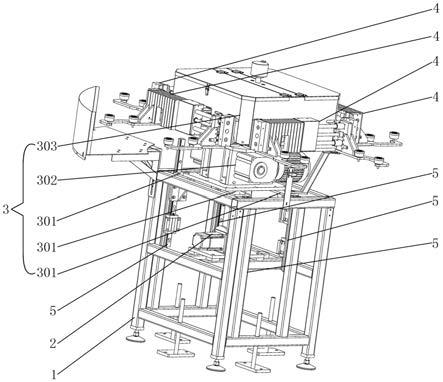
11.图1是本实用新型一个实施例的结构示意图;
12.图2是图1所示实施例拆掉可转动支撑装置和夹持单元后的结构示意图;
13.图3是图1所示实施例升降机构的结构示意图。
具体实施方式
14.如图1-3所示,本申请一个实施例中的陶瓷坯转移机械手,包括机架1、升降机构、可转动支撑装置3和四个夹持单元4,升降机构安装在机架1上,可转动支撑装置3安装在升降机构上,夹持单元4安装在可转动支撑装置3外侧壁上;所述升降机构为丝杆升降机2,丝杆升降机2具有丝杆201、升降支撑台202(还包括伺服电机203、涡轮204、蜗杆205等,在此不多加描述),升降支撑台202安装在丝杆201顶端,可转动支撑装置3安装在升降支撑台202上,机架1上安装有四条轨道5,可转动支撑装置3具有四条支撑腿301,支撑腿301与轨道5两者数目相同并且一一对应,各支撑腿301底端分别可滑动地安装在对应的轨道5上。
15.所述可转动支撑装置3还包括凸轮分割器302、可转动架303,凸轮分割器302安装在升降支撑台202上,可转动架303安装在凸轮分割器302上,各支撑腿301固定在可转动架303上。
16.各轨道5沿着机架1的周向依次均匀分布。
17.四个夹持单元4分别安装在可转动架303上并且四个夹持单元4分别沿着可转动架303的周向依次均匀分布。
18.下面结合图1-3介绍一下工作过程:
19.当需要转移的陶瓷坯改变以后,如果陶瓷坯的高度发生明显改变,则丝杆201升降机2工作,丝杆201带动升降支撑台202上升或下降,使得可转动支撑装置3跟随升降支撑台202上升或下降,以便更好地夹持陶瓷坯。调节完毕后,丝杆201升降机2停止工作。
20.接下来,可转动支撑装置3及夹持单元4正常工作,完成陶瓷坯的转移。
21.此外,需要说明的是,本说明书中所描述的具体实施例,其各部分名称等可以不同,凡依本实用新型专利构思所述的构造、特征及原理所做的等效或简单变化,均包括于本实用新型专利的保护范围内。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离本实用新型的结构或者超越本权利要求书所定义的范围,均应属于本实用新型的保护范围。
技术特征:
1.一种陶瓷坯转移机械手,其特征在于:包括机架、升降机构、可转动支撑装置和至少一个夹持单元,升降机构安装在机架上,可转动支撑装置安装在升降机构上,夹持单元安装在可转动支撑装置外侧壁上;所述升降机构为丝杆升降机,丝杆升降机具有丝杆、升降支撑台,升降支撑台安装在丝杆顶端,可转动支撑装置安装在升降支撑台上,机架上安装有多条轨道,可转动支撑装置具有多条支撑腿,支撑腿与轨道两者数目相同并且一一对应,各支撑腿底端分别可滑动地安装在对应的轨道上。2.如权利要求1所述的陶瓷坯转移机械手,其特征在于:所述可转动支撑装置还包括凸轮分割器、可转动架,凸轮分割器安装在升降支撑台上,可转动架安装在凸轮分割器上,各支撑腿固定在可转动架上。3.如权利要求1所述的陶瓷坯转移机械手,其特征在于:所述支撑腿与轨道两者数目均为四个,各轨道沿着机架的周向依次均匀分布。4.如权利要求1所述的陶瓷坯转移机械手,其特征在于:所述夹持单元的数目为四个,四个夹持单元分别安装在可转动架上并且四个夹持单元分别沿着可转动架的周向依次均匀分布。
技术总结
一种陶瓷坯转移机械手,包括机架、升降机构、可转动支撑装置和至少一个夹持单元,升降机构安装在机架上,可转动支撑装置安装在升降机构上,夹持单元安装在可转动支撑装置外侧壁上;所述升降机构为丝杆升降机,丝杆升降机具有丝杆、升降支撑台,升降支撑台安装在丝杆顶端,可转动支撑装置安装在升降支撑台上,机架上安装有多条轨道,可转动支撑装置具有多条支撑腿,支撑腿与轨道两者数目相同并且一一对应,各支撑腿底端分别可滑动地安装在对应的轨道上。本实用新型由于设有丝杆升降机,因此能够根据不同陶瓷坯的尺寸快速调节所有夹持单元的高度,从而满足实际生产的需求;而支撑腿与轨道相互配合,使得转动支撑装置的升降运动更加平稳。更加平稳。更加平稳。
技术研发人员:江培汉
受保护的技术使用者:江培汉
技术研发日:2021.08.19
技术公布日:2022/1/21