1.本实用新型属于焊接设备领域,特别涉及一种抗高压的安全型焊接机器人。
背景技术:
2.现代科学技术的不断发展,极大地推动了不同学科的交叉与渗透,导致了工程领域的技术革命与改造。各类工业机器人是近年来才迅速发展起来的重要自动化装置,现已成为实现工业自动化的一种重要手段。工业机器人目前还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲倦,不怕危险,抓举重物的力量比人手大的特点,已经受到许多部门和企业的重视。因此,加强工业机器人在危险环境中的工作能力也一直是研发人员的研究方向。
3.现在的焊接机器人仍然存在着许多不足之处,例如,现在的焊接机器人大多不具备抗高压能力,机器人采用的是简单的骨骼构架,运动件和连接件外露,容易受到损伤,无法适应水下等大压力的加工环境,也不能应对外力冲击等加工事故中的危险。同时,现在的焊接机器人大多存在压缩气体的出力和保护不足的问题,由于加工环境压力大,压缩气体受反作用力大,送气不稳定,同时对送气管道的保护也不足。因此,本技术就以上问题,对焊接机器人进行了创新和改进。
4.现在的焊接机器人,主要存在以下几个问题:
5.1、现在的焊接机器人大多不具备抗高压能力,机器人采用的是简单的骨骼构架,运动件和连接件外露,容易受到损伤,无法适应水下等大压力的加工环境,也不能应对外力冲击等加工事故中的危险。
6.2、现在的焊接机器人大多存在压缩气体的出力和保护不足的问题,由于加工环境压力大,压缩气体受反作用力大,送气不稳定,同时对送气管道的保护也不足。
技术实现要素:
7.发明目的:为了克服以上不足,本实用新型的目的是提供一种抗高压的安全型焊接机器人,一方面通过错位层叠的方式,在保证机器人关节灵活性的同时保护了关节,提高了关节的抗压和抗冲击能力,另一方面对送气管道进行了强化和保护,提高了压缩气体的送气强度,降低了送气管道破损带来的危险。
8.技术方案:为了实现上述目的,本实用新型提供了一种抗高压的安全型焊接机器人,包括:基座、第一机械臂、第二机械臂、密封关节、焊接机头、压缩气管道、加压齿轮泵和管道保护装置,所述基座上设置有第一机械臂,所述第一机械臂与基座铰接,所述第一机械臂远离基座的一端设置有第二机械臂,所述第二机械臂远离第一机械臂的一端设置有焊接机头;所述基座与第一机械臂的连接处设置有密封关节,所述第一机械臂与第二机械臂的连接处设置有密封关节;所述焊接机头上设置有压缩气管道,所述压缩气管道上设置有加压齿轮泵,所述压缩气管道外侧设置有管道保护装置。
9.本实用新型中所述的密封关节包括第一固定环、过渡环、内过渡环、连接纤维层和
第二固定环,所述第一固定环一端设置有过渡环,所述过渡环设置有多个,所述过渡环之间连接设置有内过渡环,所述内过渡环设置于过渡环内侧,所述过渡环远离第一固定环的一端设置有第二固定环;所述第一固定环与过渡环之间设置有连接纤维层,所述过渡环与第二固定环之间设置有连接纤维层,所述过渡环与内过渡环之间设置有连接纤维层。
10.本实用新型中所述的过渡环包括环体板、接触弧板和密封槽,所述环体板两端设置有接触弧板,所述接触弧板向内过渡环方向弯曲,所述接触弧板与内过渡环配合;所述接触弧板靠近内过渡环的一侧设置有密封槽,所述密封槽内设置有连接纤维层。
11.本实用新型中所述密封关节的设置,通过错位层叠的方式,在保证机器人关节灵活性的同时保护了关节,提高了关节的抗压和抗冲击能力。
12.本实用新型中所述的内过渡环包括内环板、反向接触弧板和第二密封槽,所述内环板两端设置有反向接触弧板,所述反向接触弧板向过渡环方向弯曲,所述反向接触弧板与过渡环配合;所述反向接触弧板靠近过渡环的一侧设置有第二密封槽,所述第二密封槽内设置有连接纤维层。
13.本实用新型中所述的连接纤维层包括密封橡胶层、强化纤维层和抗拉丝线,所述密封橡胶层两侧设置有强化纤维层,所述强化纤维层外侧设置有抗拉丝线,所述抗拉丝线呈网格状布置。
14.本实用新型中所述连接纤维层的设置,一方面强化了两种环之间的密封性,同时采用复合层提高其韧性和强度,使其能够分摊过渡板和内过渡板的压力。
15.本实用新型中所述的管道保护装置包括外罩管、爆破片和导爆管,所述外罩管设置于压缩气管道外侧,所述外罩管包覆压缩气管道,所述外罩管上设置有爆破片,所述爆破片设置有多个,所述爆破片一侧设置有导爆管,所述导爆管延伸至焊接机头外侧,所述导爆管上设置有单向阀。
16.本实用新型中所述管道保护装置的设置,对送气管道进行了强化和保护,提高了压缩气体的送气强度,降低了送气管道破损带来的危险。
17.本实用新型中所述的基座上设置有缓冲缸,所述缓冲缸包括缸体、浮动阀、浮动油管、缓冲油管和压力开关,所述缸体一端铰接于基座上,所述缸体另一端铰接于第一机械臂上;所述缸体一侧连接设置有浮动阀,所述浮动阀连接设置有浮动油管,所述浮动油管连接缸体两端,所述浮动油管一侧设置有缓冲油管,所述缓冲油管连接缸体两端;所述浮动阀连接设置有压力开关,所述压力开关设置于缸体一端,所述压力开关与第一机械臂接触。
18.本实用新型中所述的第一机械臂与第二机械臂之间同样设置有缓冲缸。
19.本实用新型中所述浮动油管截面积大于缓冲油管截面积。
20.本实用新型中所述的压力开关受到大压力时,响应关闭浮动阀,依靠缓冲油管送油,使缓冲缸缓慢运动;当正常工作时,浮动油管和缓冲油管同时送油,不影响机器人运动。
21.本实用新型中所述缓冲缸的设置,利用缓冲缸降低了设备的坠落速度,缓解了设备失效时对自身部件的冲击力,安全性高。
22.上述技术方案可以看出,本实用新型具有如下有益效果:
23.1、本实用新型中所述的一种抗高压的安全型焊接机器人,通过错位层叠的方式,在保证机器人关节灵活性的同时保护了关节,提高了关节的抗压和抗冲击能力。
24.2、本实用新型中所述的一种抗高压的安全型焊接机器人,对送气管道进行了强化
和保护,提高了压缩气体的送气强度,降低了送气管道破损带来的危险。
25.3、本实用新型中所述的一种抗高压的安全型焊接机器人,利用缓冲缸降低了设备的坠落速度,缓解了设备失效时对自身部件的冲击力,安全性高。
附图说明
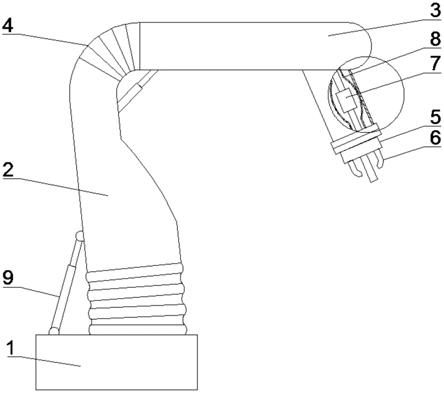
26.图1为本实用新型的整体结构示意图;
27.图2为本实用新型密封关节的结构示意图;
28.图3为本实用新型管道保护装置的结构示意图;
29.图4为本实用新型缓冲缸的结构示意图;
30.图中:基座-1、第一机械臂-2、第二机械臂-3、密封关节-4、第一固定环-41、过渡环-42、环体板-421、接触弧板-422、密封槽-423、内过渡环-43、内环板-431、反向接触弧板-432、第二密封槽-433、连接纤维层-44、密封橡胶层-441、强化纤维层-442、抗拉丝线-443、第二固定环-45、焊接机头-5、压缩气管道-6、加压齿轮泵-7、管道保护装置-8、外罩管-81、爆破片-82、导爆管-83、缓冲缸-9、缸体-91、浮动阀-92、浮动油管-93、缓冲油管-94、压力开关-95。
具体实施方式
31.下面结合附图和具体实施例,进一步阐明本实用新型。
32.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
33.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
34.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上,除非另有明确的限定。
35.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
36.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第
一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
37.实施例1
38.如图1-4所示的一种抗高压的安全型焊接机器人,包括:基座1、第一机械臂2、第二机械臂3、密封关节4、焊接机头5、压缩气管道6、加压齿轮泵7和管道保护装置8,所述基座1上设置有第一机械臂2,所述第一机械臂2与基座1铰接,所述第一机械臂2远离基座1的一端设置有第二机械臂3,所述第二机械臂3远离第一机械臂2的一端设置有焊接机头5;所述基座1与第一机械臂2的连接处设置有密封关节4,所述第一机械臂2与第二机械臂3的连接处设置有密封关节4;所述焊接机头5上设置有压缩气管道6,所述压缩气管道6上设置有加压齿轮泵7,所述压缩气管道6外侧设置有管道保护装置8。
39.本实施例中所述的密封关节4包括第一固定环41、过渡环42、内过渡环43、连接纤维层44和第二固定环45,所述第一固定环41一端设置有过渡环42,所述过渡环42设置有多个,所述过渡环42之间连接设置有内过渡环43,所述内过渡环43设置于过渡环42内侧,所述过渡环42远离第一固定环41的一端设置有第二固定环45;所述第一固定环41与过渡环42之间设置有连接纤维层44,所述过渡环42与第二固定环45之间设置有连接纤维层44,所述过渡环42与内过渡环43之间设置有连接纤维层44。
40.本实施例中所述的过渡环42包括环体板421、接触弧板422和密封槽423,所述环体板421两端设置有接触弧板422,所述接触弧板422向内过渡环43方向弯曲,所述接触弧板422与内过渡环43配合;所述接触弧板422靠近内过渡环43的一侧设置有密封槽423,所述密封槽423内设置有连接纤维层44。
41.本实施例中所述的内过渡环43包括内环板431、反向接触弧板432和第二密封槽433,所述内环板431两端设置有反向接触弧板432,所述反向接触弧板432向过渡环42方向弯曲,所述反向接触弧板432与过渡环42配合;所述反向接触弧板432靠近过渡环42的一侧设置有第二密封槽433,所述第二密封槽433内设置有连接纤维层44。
42.本实施例中所述的连接纤维层44包括密封橡胶层441、强化纤维层442和抗拉丝线443,所述密封橡胶层441两侧设置有强化纤维层442,所述强化纤维层442外侧设置有抗拉丝线443,所述抗拉丝线443呈网格状布置。
43.本实施例中所述的管道保护装置8包括外罩管81、爆破片82和导爆管83,所述外罩管81设置于压缩气管道6外侧,所述外罩管81包覆压缩气管道6,所述外罩管81上设置有爆破片82,所述爆破片82设置有多个,所述爆破片82一侧设置有导爆管83,所述导爆管83延伸至焊接机头5外侧,所述导爆管83上设置有单向阀。
44.本实施例中所述的基座1上设置有缓冲缸9,所述缓冲缸9包括缸体91、浮动阀92、浮动油管93、缓冲油管94和压力开关95,所述缸体91一端铰接于基座1上,所述缸体91另一端铰接于第一机械臂2上;所述缸体91一侧连接设置有浮动阀92,所述浮动阀92连接设置有浮动油管93,所述浮动油管93连接缸体91两端,所述浮动油管93一侧设置有缓冲油管94,所述缓冲油管94连接缸体91两端;所述浮动阀92连接设置有压力开关95,所述压力开关95设置于缸体91一端,所述压力开关94与第一机械臂2接触。
45.本实施例中所述的第一机械臂2与第二机械臂3之间同样设置有缓冲缸9。
46.实施例2
47.如图1和2所示的一种抗高压的安全型焊接机器人,包括:基座1、第一机械臂2、第二机械臂3、密封关节4、焊接机头5、压缩气管道6、加压齿轮泵7和管道保护装置8,所述基座1上设置有第一机械臂2,所述第一机械臂2与基座1铰接,所述第一机械臂2远离基座1的一端设置有第二机械臂3,所述第二机械臂3远离第一机械臂2的一端设置有焊接机头5;所述基座1与第一机械臂2的连接处设置有密封关节4,所述第一机械臂2与第二机械臂3的连接处设置有密封关节4;所述焊接机头5上设置有压缩气管道6,所述压缩气管道6上设置有加压齿轮泵7,所述压缩气管道6外侧设置有管道保护装置8。
48.本实施例中所述的密封关节4包括第一固定环41、过渡环42、内过渡环43、连接纤维层44和第二固定环45,所述第一固定环41一端设置有过渡环42,所述过渡环42设置有多个,所述过渡环42之间连接设置有内过渡环43,所述内过渡环43设置于过渡环42内侧,所述过渡环42远离第一固定环41的一端设置有第二固定环45;所述第一固定环41与过渡环42之间设置有连接纤维层44,所述过渡环42与第二固定环45之间设置有连接纤维层44,所述过渡环42与内过渡环43之间设置有连接纤维层44。
49.本实施例中所述的过渡环42包括环体板421、接触弧板422和密封槽423,所述环体板421两端设置有接触弧板422,所述接触弧板422向内过渡环43方向弯曲,所述接触弧板422与内过渡环43配合;所述接触弧板422靠近内过渡环43的一侧设置有密封槽423,所述密封槽423内设置有连接纤维层44。
50.本实施例中所述的内过渡环43包括内环板431、反向接触弧板432和第二密封槽433,所述内环板431两端设置有反向接触弧板432,所述反向接触弧板432向过渡环42方向弯曲,所述反向接触弧板432与过渡环42配合;所述反向接触弧板432靠近过渡环42的一侧设置有第二密封槽433,所述第二密封槽433内设置有连接纤维层44。
51.本实施例中所述的连接纤维层44包括密封橡胶层441、强化纤维层442和抗拉丝线443,所述密封橡胶层441两侧设置有强化纤维层442,所述强化纤维层442外侧设置有抗拉丝线443,所述抗拉丝线443呈网格状布置。
52.实施例3
53.如图1和3所示的一种抗高压的安全型焊接机器人,包括:基座1、第一机械臂2、第二机械臂3、密封关节4、焊接机头5、压缩气管道6、加压齿轮泵7和管道保护装置8,所述基座1上设置有第一机械臂2,所述第一机械臂2与基座1铰接,所述第一机械臂2远离基座1的一端设置有第二机械臂3,所述第二机械臂3远离第一机械臂2的一端设置有焊接机头5;所述基座1与第一机械臂2的连接处设置有密封关节4,所述第一机械臂2与第二机械臂3的连接处设置有密封关节4;所述焊接机头5上设置有压缩气管道6,所述压缩气管道6上设置有加压齿轮泵7,所述压缩气管道6外侧设置有管道保护装置8。
54.本实施例中所述的管道保护装置8包括外罩管81、爆破片82和导爆管83,所述外罩管81设置于压缩气管道6外侧,所述外罩管81包覆压缩气管道6,所述外罩管81上设置有爆破片82,所述爆破片82设置有多个,所述爆破片82一侧设置有导爆管83,所述导爆管83延伸至焊接机头5外侧,所述导爆管83上设置有单向阀。
55.实施例4
56.如图1和4所示的一种抗高压的安全型焊接机器人,包括:基座1、第一机械臂2、第
二机械臂3、密封关节4、焊接机头5、压缩气管道6、加压齿轮泵7和管道保护装置8,所述基座1上设置有第一机械臂2,所述第一机械臂2与基座1铰接,所述第一机械臂2远离基座1的一端设置有第二机械臂3,所述第二机械臂3远离第一机械臂2的一端设置有焊接机头5;所述基座1与第一机械臂2的连接处设置有密封关节4,所述第一机械臂2与第二机械臂3的连接处设置有密封关节4;所述焊接机头5上设置有压缩气管道6,所述压缩气管道6上设置有加压齿轮泵7,所述压缩气管道6外侧设置有管道保护装置8。
57.本实施例中所述的基座1上设置有缓冲缸9,所述缓冲缸9包括缸体91、浮动阀92、浮动油管93、缓冲油管94和压力开关95,所述缸体91一端铰接于基座1上,所述缸体91另一端铰接于第一机械臂2上;所述缸体91一侧连接设置有浮动阀92,所述浮动阀92连接设置有浮动油管93,所述浮动油管93连接缸体91两端,所述浮动油管93一侧设置有缓冲油管94,所述缓冲油管94连接缸体91两端;所述浮动阀92连接设置有压力开关95,所述压力开关95设置于缸体91一端,所述压力开关94与第一机械臂2接触。
58.本实施例中所述的第一机械臂2与第二机械臂3之间同样设置有缓冲缸9。
59.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进,这些改进也应视为本实用新型的保护范围。