1.本公开涉及机器人系统。
背景技术:
2.近年,在物流领域中,正在推进作业的自动化。例如,配送品向瓦楞纸箱的捆包作业包含瓦楞纸箱的组装工序、配送品向瓦楞纸箱的装入工序、以及瓦楞纸箱的封缄工序等。组装工序包括折叠后的瓦楞纸箱的开箱、底部的折翼的折弯以及封缄等。例如,专利文献1公开有进行瓦楞纸箱的组装工序的制箱装置。该制箱装置具备机器人臂、配置于机器人臂的端部的吸嘴、以及折叠瓦楞纸箱的4个底部的折翼(叶片部)的折叠装置。机器人臂通过用吸嘴吸附被折叠后的瓦楞纸箱使其抬起并倾斜,从而利用自重使其展开成立体形状后设置于折叠装置。折叠装置通过使配置于4个折翼的周围的4个可动板旋转驱动,来折叠各折翼。
3.专利文献1:日本特表2015-505785号公报
4.专利文献1的折叠装置具备4个可动板、和对各可动板进行旋转驱动的液压或气压缸。因此,用于折弯瓦楞纸箱的底部的折翼的结构是复杂的。
技术实现要素:
5.因此,本公开的目的在于提供一种简化用于折弯物品的被折弯部的结构的机器人系统。
6.为了实现上述目的,本公开的一个形态所涉及的机器人系统具备:手部,其保持物品;臂,其使上述手部移动;以及第一抵接部,其在保持于上述手部的状态的上述物品的第一被折弯部被进行折弯的第一折弯处理时,供上述第一被折弯部抵接,上述手部具有与上述臂连接的基部、和相对于上述基部可转动且通过使上述物品附着来保持上述物品的保持部,上述手部以及上述臂构成为,在上述第一折弯处理时,边使上述第一被折弯部与上述第一抵接部抵接,边使上述保持部转动,由此将上述第一被折弯部折弯。
7.根据本公开的技术,能够简化用于折弯物品的被折弯部的结构。
附图说明
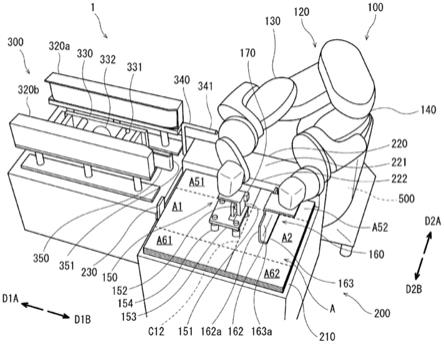
8.图1是表示实施方式所涉及的机器人系统的结构的一个例子的立体图。
9.图2是放大图1的机器人的立体图。
10.图3是表示实施方式所涉及的机器人系统的硬件结构的一个例子的框图。
11.图4是表示实施方式所涉及的控制装置的功能性结构的一个例子的框图。
12.图5是表示实施方式所涉及的机器人系统的动作的一个例子的流程图。
13.图6是表示实施方式所涉及的机器人系统的动作中的机器人的状态的一个例子的立体图。
14.图7是表示实施方式所涉及的机器人系统的动作中的机器人的状态的一个例子的立体图。
15.图8是表示实施方式所涉及的机器人系统的动作中的机器人的状态的一个例子的立体图。
16.图9是表示实施方式所涉及的机器人系统的动作中的机器人的状态的一个例子的立体图。
17.图10是表示实施方式所涉及的机器人系统的动作中的机器人的状态的一个例子的立体图。
18.图11是表示实施方式所涉及的机器人系统的动作中的机器人的状态的一个例子的立体图。
19.图12是表示实施方式所涉及的机器人系统的动作中的机器人的状态的一个例子的立体图。
20.图13是表示实施方式所涉及的机器人系统的动作中的机器人的状态的一个例子的立体图。
21.图14是放大图13的一部分的侧视图。
22.图15是表示实施方式所涉及的机器人系统的动作中的机器人的状态的一个例子的立体图。
23.图16是放大图15的一部分的侧视图。
24.图17是表示实施方式所涉及的机器人系统的动作中的机器人的状态的一个例子的立体图。
25.图18是表示实施方式所涉及的机器人系统的动作中的机器人的状态的一个例子的立体图。
具体实施方式
26.以下,参照附图,对本公开的实施方式进行说明。此外,以下说明的实施方式均表示概括性或具体的例子。另外,对于以下实施方式中的构成要素中的表示最上位概念的未记载于独立权利要求的构成要素,被描述为任意的构成要素。另外,附图中的各图是示意性的图,且未必是严格图示的。并且,在各图中,对实质上相同的构成要素标注相同的附图标记,有时省略或简化重复的说明。另外,在本说明书以及权利要求书中,所谓“装置”,不仅可以指一个装置,还可以指由多个装置构成的系统。
27.<机器人系统的结构>
28.对实施方式所涉及的机器人系统1的结构进行说明。图1是表示实施方式所涉及的机器人系统1的结构的一个例子的立体图。在以下实施方式中,机器人系统1将被描述为使用机器人100,将被折叠后的物品a组装成有底筒形状亦即箱形状的作业,即进行制箱的系统。此外,应用机器人系统1的作业只要是包含将物品a的被折弯部进行折弯的工序的作业即可。另外,在本实施方式中,组装对象的物品a是瓦楞纸箱。瓦楞纸箱的形状在被开箱且上下被封缄的状态下为立方体。在本说明书以及权利要求书中,所谓“开箱”,是指将被折叠后的片状的瓦楞纸箱形成为方筒等筒状的立体形状。以下,也将“物品a”记为“瓦楞纸箱a”。
29.如图1所示,机器人系统1具备机器人100、载置台200、封缄台300、输入装置400以及控制装置500。机器人100以及封缄台300与载置台200相邻配置。控制装置500在本实施方式中配置于机器人100,但也可以配置于载置台200等其他装置。
30.机器人100将载置于载置台200的折叠瓦楞纸箱a组装成箱状瓦楞纸箱a,并将其输送至封缄台300。封缄台300用胶带封缄箱状瓦楞纸箱a的底部的折翼,并输送到下一个工序。下一个工序的例子是物品向被封缄后的箱状瓦楞纸箱a的装入工序等。
31.在本说明书以及权利要求书中,折叠瓦楞纸箱a是指被折叠后的状态的片状的瓦楞纸箱,且在组装前即开箱前的扁平的状态的瓦楞纸箱。箱状瓦楞纸箱a是部分被组装的状态的立体的瓦楞纸箱,且是指折叠瓦楞纸箱a被开箱且由被折弯后的折翼形成底部的状态的瓦楞纸箱。在箱状瓦楞纸箱a中,底部未封缄,且上部的折翼未折弯并且未被封缄。
32.[载置台]
[0033]
载置台200具备载置面210、下方辅助部件220以及止动件230。载置面210是沿载置台200的上部的水平方向延伸的平坦的面,构成为能够上下层叠地载置多个折叠瓦楞纸箱a。
[0034]
下方辅助部件220配置于载置台200的上部,比载置面210向上方突出。在本实施方式中,下方辅助部件220具有将第一方向d1设为长边方向的长方体状的形状。下方辅助部件220在与第一方向d1正交的第二方向d2上,与载置面210相邻。下方辅助部件220包含能够使箱状瓦楞纸箱a载置于其上的平坦的上表面221。上表面221位于比可载置于载置面210上的多个折叠瓦楞纸箱a靠上方的位置。上表面221包含沿着载置面210延伸的2个角部222以及223。角部222是与载置面210临近的角部。上表面221以及角部222分别构成第一下方抵接部以及第二下方抵接部。以下,将“上表面221”以及“角部222”也分别记为“第一下方抵接部221”以及“第二下方抵接部222”。下方抵接部221以及222是第一抵接部或第二抵接部的一个例子。
[0035]
这里,第一方向d1包含从载置台200朝向封缄台300的第一方向d1a、和与第一方向d1a相反朝向的第一方向d1b这2个方向。以下,有时在区别表现上述2个方向时,使用“第一方向d1a”以及“第一方向d1b”,在不区别表现上述2个方向时,使用“第一方向d1”。第二方向d2包含从载置面210朝向下方辅助部件220的第二方向d2a、和与第二方向d2a相反朝向的第二方向d2b这2个方向。以下,有时在区别表现上述2个方向时,使用“第二方向d2a”以及“第二方向d2b”,在不区别表现上述2个方向时,使用“第二方向d2”。
[0036]
另外,所谓“上方”,是指机器人100、载置台200以及封缄台300配置于水平的地面等水平的表面上的情况下的从下方朝向上方的方向,所谓“下方”,是指在同样的情况下的从上方朝向下方的方向。所谓“水平方向”,是指在同样的情况下的水平方向,也是与上述表面平行的方向。所谓“铅锤方向”,是指在同样的情况下的铅锤方向,是与上述表面垂直的方向。第一方向d1以及第二方向d2是沿着上述表面的方向。
[0037]
止动件230在第一方向d1(在本实施方式中第一方向d1a)上与载置面210相邻地配置,并与下方辅助部件220同样,比载置面210向上方突出。止动件230以及下方辅助部件220在载置面210上对折叠瓦楞纸箱a进行定位。折叠瓦楞纸箱a使其周缘的2个边与下方辅助部件220的侧面和止动件230抵接并载置于载置面210,由此相对于载置面210定位到水平方向的规定的位置。
[0038]
[封缄台]
[0039]
封缄台300封缄从载置台200输送来的箱状瓦楞纸箱a的底部的折翼。封缄台300具备基台310、输送装置320a以及320b、封缄装置330。
[0040]
输送装置320a以及320b以第一方向d1作为长边方向配置于基台310上。输送装置320a相对于输送装置320b向第二方向d2a隔开间隔地配置。输送装置320a以及320b的间隔是能够供将底部作为下方的状态的箱状瓦楞纸箱a通过的大小,也可以是与该状态的箱状瓦楞纸箱a的2个方向的宽度之一接近的尺寸。
[0041]
输送装置320a以及320b使箱状瓦楞纸箱a通过输送装置320a以及320b之间,由此边将箱状瓦楞纸箱a在第二方向d2上定位边向第一方向d1a输送。输送装置320a以及320b的至少一个也可以构成为能够沿第二方向d2移动来变更彼此的间隔,以便能够使各种尺寸的箱状瓦楞纸箱a通过。
[0042]
在本实施方式中,输送装置320a以及320b是带式输送机。输送装置320a以及320b分别具备:无端环状的输送带321a以及321b、使输送带321a以及321b分别环绕的多个辊(未图示)、以及对辊进行旋转驱动的驱动装置(未图示)。输送带321a形成朝向第二方向d2b的输送面322a,输送带321b形成朝向第二方向d2a的输送面322b。输送面322a以及322b在第二方向d2上对置且大致平行。驱动装置的例子为电动马达等。输送装置320a以及320b的驱动装置分别通过对辊进行旋转驱动,从而使输送带321a以及321b环绕,以便使输送面322a以及322b沿第一方向d1a移动。输送带321a以及321b边将在输送带321a以及321b之间与输送面322a以及322b接触的箱状瓦楞纸箱a在第二方向d2上定位,边将其向第一方向d1a输送。
[0043]
封缄装置330对由输送装置320a以及320b输送并在其上通过的箱状瓦楞纸箱a的底部的折翼进行封缄。封缄装置330在基台310上配置于输送装置320a以及320b之间,与下方辅助部件220在第一方向d1a上相邻。封缄装置330的上部的高度与下方辅助部件220的上表面221的高度相同。由此,箱状瓦楞纸箱a能够从上表面221顺畅地移动到封缄装置330上。
[0044]
封缄装置330具备封缄传感器331、和为了封缄而将胶带粘贴于箱状瓦楞纸箱a的底部的折翼的粘贴装置332。封缄传感器331检测存在于封缄装置330上的箱状瓦楞纸箱a,并将表示检测结果的信号输出至控制装置500。控制装置500当从封缄传感器331接收到检测到箱状瓦楞纸箱a的信号时,向粘贴装置332输出执行封缄的指令。粘贴装置332启动,将胶带粘贴于上方的箱状瓦楞纸箱a的底部的折翼而使其封缄。箱状瓦楞纸箱a在第二方向d2上由输送装置320a以及320b定位,因此粘贴装置332能够将胶带粘贴于底部的相同的位置。封缄传感器331只要能够检测物体即可,例如,能够使用光电传感器(也称为“光束传感器”)、激光传感器、超声波传感器、限位开关等。此外,封缄装置330只要能够使胶带与通过上方的箱状瓦楞纸箱a的底部接触并粘贴即可,也可以不包含封缄传感器331以及粘贴装置332的驱动装置等电气机构,而仅由机械式机构构成。
[0045]
另外,上方辅助部件340以及侧方辅助部件350配置于封缄台300。上方辅助部件340与输送装置320a在第一方向d1b上相邻地配置。上方辅助部件340包含向第一方向d1b延伸的上方抵接部341。上方抵接部341位于相对于下方抵接部221以及222向上方隔开间隔的位置,并与下方抵接部221以及222的至少一部分(在本实施方式中一部分)对置。虽然不限定于此,但在本实施方式中,上方抵接部341由与第二下方抵接部222大致平行地延伸的棒状的部件构成。例如,上方辅助部件340可以由在从基台310向上方延伸后向第一方向d1b延伸的l字状的棒部件构成。上方辅助部件340的固定位置并不限定于基台310,例如也可以为输送装置320a、载置台200或下方辅助部件220等。上方抵接部341是第一抵接部或第二抵接部的一个例子。
[0046]
侧方辅助部件350在第一方向d1b上与输送装置320b相邻地配置。侧方辅助部件350向第一方向d1b延伸,在其前端包含侧方抵接部351。侧方抵接部351沿与上方抵接部341延伸的方向亦即第一方向d1b交叉的方向延伸,在本实施方式中,沿与第一方向d1b大致垂直的上下方向延伸。侧方抵接部351配置于比下方辅助部件220的下方抵接部221以及222靠上方的位置。并且,侧方抵接部351配置于比上方抵接部341以及第二下方抵接部222靠第二方向d2b的位置。例如,侧方辅助部件350可以由在从输送装置320b向第一方向d1b延伸后向第二方向d2a或d2b延伸的l字状的板部件构成。沿第二方向d2a或d2b延伸的部分构成侧方抵接部351,其矩形状的主面朝向第一方向d1b,该主面的长边方向为上下方向。侧方辅助部件350的固定位置并不限定于输送装置320b,例如也可以为基台310或载置台200等。侧方抵接部351是第三抵接部的一个例子。
[0047]
[机器人]
[0048]
图2是放大图1的机器人100的立体图。如图2所示,机器人100具备基台110、和配置于基台110上的机器人主体120。在本实施方式中,机器人主体120具备第一臂130以及第二臂140,该第一臂130以及第二臂140能够在以铅锤方向的第一轴s1为中心的同轴上在水平面内转动。这样的机器人主体120构成同轴双臂机器人。
[0049]
第一臂130包含连杆131~135、和臂驱动装置ma1~ma6(参照图3)。第二臂140包含连杆141~145、和臂驱动装置mb1~mb6(参照图3)。臂驱动装置ma1~ma6以及mb1~mb6例如为伺服马达等电动马达等,在本实施方式中,为伺服马达。臂驱动装置ma1~ma6以及mb1~mb6的驱动由控制装置500控制。
[0050]
第一连杆131以及141分别以第一轴s1为中心在水平面内可转动地经由关节(未图示)与基台110连接。臂驱动装置ma1以及mb1分别使第一连杆131以及141转动。第一连杆131以及141在第一轴s1的方向上错开配置。臂130以及140分别能够相互独立地动作,但在以第一轴s1为中心的转动时,能够抑制相互的干扰。由此,能够增大臂130以及140的转动范围。
[0051]
第二连杆132以及142分别以铅锤方向的第二轴s2a以及s2b为中心在水平面内可转动地经由关节(未图示)与第一连杆131以及141连接。臂驱动装置ma2以及mb2分别使第二连杆132以及142转动。第三连杆133以及143分别以水平方向的第三轴s3a以及s3b为中心在铅锤面内可转动地经由关节(未图示)与第二连杆132以及142连接。臂驱动装置ma3以及mb3分别使第三连杆133以及143转动。第四连杆134以及144分别以水平方向的第四轴s4a以及s4b为中心在铅锤面内可转动地经由关节(未图示)与第三连杆133以及143连接。臂驱动装置ma4以及mb4分别使第四连杆134以及144转动。第五连杆135以及145分别以水平方向的第五轴s5a以及s5b为中心可摆动地经由关节(未图示)与第四连杆134以及144连接。臂驱动装置ma5以及mb5分别使第五连杆135以及145摆动。
[0052]
另外,机器人主体120在第一臂130以及第二臂140每一个的前端具备第一手部150以及第二手部160。手部150以及160保持瓦楞纸箱a,臂130以及140分别使手部150以及160移动。手部150以及160分别以第六轴s6a以及s6b为中心可转动地经由关节(未图示)与第五连杆135以及145连接。第六轴s6a沿着第五连杆135的长边方向且与第五轴s5a垂直。第六轴s6b沿着第五连杆145的长边方向且与第五轴s5b垂直。臂驱动装置ma6以及mb6分别使手部150以及160转动。上述那样的臂130以及140构成水平多关节型的臂。
[0053]
第二手部160包含安装部161、侧方部162、以及下方部163。安装部161与第五连杆
145连接。例如,安装部161由与第六轴s6b垂直的矩形状的板状部件构成。
[0054]
侧方部162具有平坦的抵接面162a,并与安装部161连接。例如,侧方部162由与安装部161垂直的细长的矩形状的板状部件构成,侧方部162的矩形状的主面构成抵接面162a。在第六轴s6b的方向为铅锤方向,即安装部161为水平时,抵接面162a朝向水平方向,其长边方向为水平方向。
[0055]
下方部163具有平坦的主面163a,并与侧方部162连接。例如,下方部163由与侧方部162垂直的细长的矩形状的板状部件构成,主面163a为矩形状的面。在第六轴s6b的方向为铅锤方向时,主面163a朝向下方,其长边方向为水平方向。例如,侧方部162以及下方部163由l字状的部件构成。
[0056]
第二手部160通过以铅锤状态的第六轴s6b为中心转动,能够使主面163a朝下,并且将抵接面162a的朝向改变为水平方向的任意的朝向。
[0057]
第一手部150具备安装基部151、连结转动轴152、保持部153、吸附装置154以及手部驱动装置mc(参照图3)。安装基部151可转动地与第五连杆135连接,且经由连结转动轴152可转动地与保持部153连接。连结转动轴152是相对于安装基部151与第五连杆135的连接方向亦即第六轴s6a的方向交叉的方向的轴,在本实施方式中正交。例如,安装基部151由包含与第六轴s6a垂直的板状部件和与该板状部件垂直的板状部件在内的l字状的部件构成。
[0058]
保持部153能够相对于安装基部151转动且通过使瓦楞纸箱a附着来保持该瓦楞纸箱a。保持部153经由连结转动轴152与安装基部151可转动地连接,在本实施方式中,保持部153构成为与连结转动轴152一体地转动。保持部153在与连结转动轴152相反的一侧具有供吸附装置154配置的平坦的主面153a。例如,保持部153由包含与安装基部151连接的板状部件、和与该板状部件垂直且具有主面153a的板状部件在内的t字状的部件构成。
[0059]
手部驱动装置mc通过对连结转动轴152进行旋转驱动,从而使保持部153相对于安装基部151以连结转动轴152为中心转动。手部驱动装置mc的例子为伺服马达等电动马达等,在本实施方式中为伺服马达。手部驱动装置mc的驱动由控制装置500控制。
[0060]
在第六轴s6a的方向为铅锤方向时,连结转动轴152沿水平方向延伸,保持部153能够以连结转动轴152为中心在铅锤面内转动。此外,在连结转动轴152的方向不与第六轴s6a的方向正交的情况下,通过使第五连杆135摆动,能够将连结转动轴152的方向设为水平方向。
[0061]
一个以上的吸附装置154配置于保持部153的主面153a上,在本实施方式中,配置有4个吸附装置154。吸附装置154与保持部153一起转动。吸附装置154通过产生负压来吸附瓦楞纸箱a,由此,使该瓦楞纸箱a附着于保持部153。吸附装置154例如包括具有锥形筒状等中空的形状的喷嘴,并经由配管与负压产生装置155(参照图3)连接。喷嘴向与主面153a垂直的方向开放。负压产生装置155的结构只要能够使喷嘴中产生负压即可,并没有特别限定,也可以使用现有的任何结构。例如,负压产生装置155也可以具有通过吸引空气来产生负压或真空的真空泵或气压缸的结构,也可以具有通过送入压缩空气来产生负压或真空的喷射器的结构。负压产生装置155的驱动由控制装置500控制。
[0062]
第一手部150构成为能够以连结转动轴152为中心遍及至少90
°
的转动角度地使保持部153转动。例如,在连结转动轴152的方向为水平方向时,第一手部150也可以通过使保
持部153转动,从而能够使喷嘴的朝向亦即吸附装置154的朝向至少从下方变化为水平方向,并且能够进一步朝向上方。例如,第一手部150也可以构成为使吸附装置154的朝向在铅锤面内遍及360
°
地变化。
[0063]
另外,臂驱动装置ma1~ma6以及mb1~mb6、和手部驱动装置mc的伺服马达分别具备电动马达、检测电动马达的旋转件的旋转角的编码器、以及检测电动马达的电流值的电流传感器。各伺服马达根据从控制装置500输出的指令等,使电动马达动作,将编码器以及电流传感器的检测值输入到控制装置500。控制装置500基于从各伺服马达反馈的编码器以及电流传感器的检测值,检测该伺服马达的旋转件的旋转量以及旋转速度等,并使用检测结果等,控制该伺服马达的旋转开始、旋转停止、旋转速度以及旋转转矩等。由此,控制装置500能够使各伺服马达停止在任意的旋转位置,能够使其以任意的旋转速度旋转,能够使其以任意的旋转转矩动作。因此,控制装置500能够使第一臂130、第二臂140以及第一手部150的保持部153多样且精密地动作。
[0064]
[拍摄装置]
[0065]
如图2所示,拍摄装置170配置于第一臂130,具体而言配置于第一手部150的安装基部151。拍摄装置170是拍摄用于检测到被拍摄体为止的距离等被拍摄体相对于拍摄装置170的三维位置的图像的照相机。例如,这样的照相机是拍摄数字图像的照相机,也可以具有立体照相机、单眼照相机、tof照相机(飞行时间照相机:time-of-flight-camera)、条纹投影等图案光投影照相机、或使用光切断法的照相机等结构。拍摄装置170指向沿着第六轴s6a的方向,例如朝向下方,通过拍摄载置面210来取得用于检测载置面210上的折叠瓦楞纸箱a相对于拍摄装置170的三维位置的图像。拍摄装置170既可以基于该图像,检测上述三维位置并输出到控制装置500,也可以将该图像输出到控制装置500,控制装置500运算上述三维位置。在本实施方式中,控制装置500运算上述三维位置。此外,也可以还检测折叠瓦楞纸箱a的姿势。
[0066]
[输入装置]
[0067]
如图1所示,输入装置400是接受基于操作者等用户的指令以及信息等的输入,并将该指令以及信息等输出到控制装置500的装置,其结构不限。输入装置400经由有线通信或无线通信与控制装置500连接。有线通信以及无线通信的形式也可以是任何形式。例如,输入装置400接受用于执行载置台200上的折叠瓦楞纸箱a的组装作业的指令。输入装置400接受用于确定组装对象的瓦楞纸箱a的种类、形状、尺寸以及/或规格等瓦楞纸箱a的结构的信息的输入。
[0068]
[控制装置]
[0069]
控制装置500控制机器人系统1整体的动作。图3是表示实施方式所涉及的机器人系统1的硬件结构的一个例子的框图。如图3所示,机器人系统1包含cpu(central processing unit)501、rom(read only memory)502、ram(random access memory)503、存储器504、输入i/f(接口:interface)505、拍摄元件i/f506、臂驱动电路507、手部驱动电路508、吸附驱动电路509、输送驱动电路510、封缄驱动电路511、臂驱动装置ma1~ma6以及mb1~mb6、手部驱动装置mc、负压产生装置155、输送装置320a以及320b、封缄装置330的粘贴装置332、封缄传感器331、拍摄装置170、输入装置400,作为构成要素。cpu501、rom502、ram503以及存储器504构成控制装置500。控制装置500也可以包含上述电路中的至少一个。上述构
成要素分别经由总线、有线通信或无线通信连接。此外,上述构成要素的全部并不是必须的。
[0070]
cpu501是处理器,且控制整个机器人系统1的处理以及动作。rom502由非易失性半导体存储器等构成,储存用于使cpu501控制处理以及动作的程序以及数据等。ram503由易失性半导体存储器等构成,临时储存由cpu501执行的程序以及处理中途或处理完毕的数据等。存储器504由易失性存储器以及非易失性存储器等半导体存储器、硬盘(hdd:hard disc drive)以及ssd(solid state drive)等存储装置构成。
[0071]
用于cpu501进行动作的程序被预先保持在rom502或存储器504。cpu501将程序从rom502或存储器504读出到ram503并展开。cpu501执行在ram503中被展开的程序中的代码化的各命令。此外,控制装置500的各功能也可以通过由cpu501、rom502以及ram503等构成的计算机系统来实现,也可以通过电子电路或集成电路等专用的硬件电路来实现,也可以通过上述计算机系统以及硬件电路的组合来实现。
[0072]
输入i/f505与输入装置400连接,并接受来自输入装置400的信息以及指令等的输入。输入i/f505也可以包含转换输入信号的电路等。拍摄元件i/f506根据cpu501的指令,控制拍摄装置170的拍摄元件(未图示)的驱动。拍摄元件i/f506将由拍摄装置170拍摄的图像导入ram503或存储器504。拍摄元件i/f506也可以包含用于拍摄装置170的驱动的电路等。
[0073]
臂驱动电路507根据cpu501的指令,向臂驱动装置ma1~ma6以及mb1~mb6每一个的伺服马达供给电力来控制该伺服马达的驱动。手部驱动电路508根据cpu501的指令,向手部驱动装置mc的伺服马达供给电力来控制该伺服马达的驱动。吸附驱动电路509根据cpu501的指令,向负压产生装置155根据电力来控制负压产生装置155的驱动。输送驱动电路510根据cpu501的指令,向输送装置320a以及320b供给电力来控制输送装置320a以及320b的驱动。封缄驱动电路511根据cpu501的指令,向粘贴装置332供给电力来控制粘贴装置332的驱动。cpu501基于从封缄传感器331接受的检测信号,将上述指令输出到封缄驱动电路511。
[0074]
图4是表示实施方式所涉及的控制装置500的功能性结构的一个例子的框图。如图4所示,控制装置500包含输入处理部551、臂控制部552、手部控制部553、吸附控制部554、输送控制部555、封缄控制部556、拍摄控制部557、图像处理部558以及存储部559,作为功能性构成要素。输入处理部551、臂控制部552、手部控制部553、吸附控制部554、输送控制部555、封缄控制部556、拍摄控制部557以及图像处理部558的各功能由cpu501等实现。存储部559的功能由存储器504、rom502以及ram503等实现。
[0075]
由输入处理部551、臂控制部552、手部控制部553、吸附控制部554、输送控制部555、封缄控制部556、拍摄控制部557以及图像处理部558构成的功能性构成要素分别从其他功能性构成要素取得该其他功能性构成要素的动作的信息,并使用所取得的信息来实现每一个的功能。上述功能性构成要素能够分别与其他功能性构成要素的动作协作、协调和/或配合地进行动作。例如,上述功能性构成要素能够边使输入装置400、第一臂130的臂驱动装置ma1~ma6、第二臂140的臂驱动装置mb1~mb6、第一手部150的手部驱动装置mc、负压产生装置155、输送装置320a及320b、粘贴装置332以及拍摄装置170中的至少一个装置动作,边使其他至少一个装置动作。也可以设置总括上述功能性构成要素的功能性构成要素。
[0076]
存储部559存储各种信息,并且能够读出所存储的信息。存储部559存储机器人100
可组装的瓦楞纸箱的列表,针对列表内的各瓦楞纸箱,存储种类、形状、尺寸以及/或规格等用于瓦楞纸箱的结构的信息。另外,存储部559也可以存储由拍摄装置170拍摄到的图像。存储部559也可以存储程序。
[0077]
输入处理部551将从输入装置400取得的指令以及信息输出到控制装置500的各功能性构成要素。
[0078]
拍摄控制部557控制拍摄装置170的动作。例如,拍摄控制部557也可以在机器人100组装载置台200上的折叠瓦楞纸箱a之前等规定的时刻使拍摄装置170拍摄。由此,控制装置500能够检测折叠瓦楞纸箱a相对于第一手部150的三维位置,并基于该三维位置控制机器人100。
[0079]
图像处理部558使用由拍摄装置170拍摄到的图像,检测该图像中反映出的折叠瓦楞纸箱a相对于拍摄装置170的三维位置。图像处理部558将该三维位置输出到臂控制部552等。
[0080]
臂控制部552控制臂130以及140的臂驱动装置ma1~ma6以及mb1~mb6的动作。臂控制部552基于载置台200上的折叠瓦楞纸箱a的结构以及图像处理部558的检测结果等,来控制臂驱动装置ma1~ma6以及mb1~mb6,由此使臂130以及140进行与折叠瓦楞纸箱a的组装对应的动作。另外,臂控制部552从臂驱动装置ma1~ma6以及mb1~mb6的伺服马达取得旋转量等动作量的信息,并基于该动作量,检测包含臂130以及140的各连杆、和手部150以及160的位置、姿势、移动方向以及移动速度等在内的位置姿势信息。臂控制部552将该位置姿势信息输出到手部控制部553。并且,臂控制部552通过将位置姿势信息用作反馈信息,来控制臂驱动装置ma1~ma6以及mb1~mb6的动作,使得手部150以及160的位置以及姿势等成为目标位置以及姿势等。
[0081]
手部控制部553控制第一手部150的手部驱动装置mc的动作。手部控制部553基于第一手部150的位置姿势信息,来控制手部驱动装置mc,由此以与折叠瓦楞纸箱a的组装对应的方式控制保持部153以及吸附装置154的朝向。另外,手部控制部553从手部驱动装置mc的伺服马达取得旋转量等动作量的信息,并基于该动作量,检测包含保持部153以及吸附装置154的朝向等在内的吸附姿势信息。并且,手部控制部553通过将吸附姿势信息用作反馈信息,来控制手部驱动装置mc的动作。
[0082]
吸附控制部554控制负压产生装置155的动作。例如,吸附控制部554基于由图像处理部558检测到的三维位置、第一手部150的位置姿势信息、以及吸附装置154的吸附姿势信息,在规定的时刻使负压产生装置155启动,使吸附装置154吸附瓦楞纸箱a。规定的时刻也可以为吸附装置154与瓦楞纸箱a接近或接触的时刻。
[0083]
输送控制部555控制输送装置320a以及320b的动作。例如,输送控制部555也可以在机器人100执行折叠瓦楞纸箱a的组装作业中,使输送装置320a以及320b连续地动作。
[0084]
封缄控制部556基于封缄传感器331的检测信号,来控制封缄装置330的粘贴装置332的动作。例如,封缄控制部556也可以当封缄传感器331检测到箱状瓦楞纸箱a时,使粘贴装置332动作,将胶带粘贴于该箱状瓦楞纸箱a的底部而使其封缄。
[0085]
<机器人系统的动作>
[0086]
对实施方式所涉及的机器人系统1的动作进行说明。图5是表示实施方式所涉及的机器人系统1的动作的一个例子的流程图。图6~图13、图15、图17以及图18是表示实施方式
所涉及的机器人系统1的动作中的机器人100的各状态的一个例子的立体图。图14以及图16是放大图13以及图15的一部分的侧视图。
[0087]
如图5所示,首先,输入装置400接受由操作者等用户输入的种类、形状、尺寸以及/或规格等组装对象的瓦楞纸箱a的结构的信息,并输出到控制装置500(步骤s101)。接着,输入装置400接受由用户输入的瓦楞纸箱a的组装的执行指令,并输出到控制装置500(步骤s102)。控制装置500基于在步骤s101中接受到的瓦楞纸箱a的结构,执行以下步骤中的处理。
[0088]
接着,如图2以及图5所示,在步骤s103中,多个折叠瓦楞纸箱a以层叠的状态载置于载置台200的载置面210上。折叠瓦楞纸箱a也可以通过用户的手动作业、由用户操作的其他输送装置、或自动运转的其他输送装置来载置。此外,控制装置500也可以基于从上述其他输送装置接收到的信号、由拍摄装置170拍摄到的图像、或设置于载置面210等的传感器的检测信号等,来检测载置面210上的折叠瓦楞纸箱a的有无。上述传感器也可以是与封缄传感器331同样的传感器。
[0089]
接着,在步骤s104中,控制装置500使拍摄装置170拍摄载置面210。拍摄到的图像反映出载置面210上的折叠瓦楞纸箱a的影像。接着,在步骤s105中,控制装置500使用拍摄到的图像,检测载置面210上的最上层的折叠瓦楞纸箱a相对于拍摄装置170的三维位置。由此,控制装置500取得最上层的折叠瓦楞纸箱a相对于第一手部150的三维位置。
[0090]
接着,如图5以及图6所示,在步骤s106中,控制装置500基于在步骤s105中所取得的三维位置,使第一臂130以及第一手部150动作,使吸附装置154向最上层的折叠瓦楞纸箱a上移动。具体而言,控制装置500使吸附装置154与折叠瓦楞纸箱a的侧部a1上的规定的吸附位置接近或接触。此时,控制装置500控制第一手部150的安装基部151以及保持部153的姿势,使得连结转动轴152的方向为与第一方向d1大致平行的水平方向、且吸附装置154的喷嘴朝向下方。
[0091]
并且,控制装置500通过使第二臂140动作,而使第二手部160移动到最上层的折叠瓦楞纸箱a的侧部a2的上方的规定的待机位置。此时,控制装置500通过控制第二手部160的姿势,从而使侧方部162的抵接面162a向第一方向d1a朝向水平方向,使抵接面162a的长边方向朝向与侧部a1以及a2的边界c12大致平行的水平方向,使下方部163的主面163a朝向下方。下方部163相对于抵接面162a位于第一方向d1b上。
[0092]
虽然不限定于此,但在本实施方式中,规定的吸附位置是瓦楞纸箱a的4个侧部a1~a4中的侧部a1上的位置,且是沿第二方向d2延伸的边界c12的附近的位置。侧部a1以及a2是在最上层的折叠瓦楞纸箱a中面向上方且彼此相邻的侧部,侧部a2相对于侧部a1位于第一方向d1b上。由于在这样的规定的吸附位置中瓦楞纸箱a的刚性较高,所以在该位置吸附瓦楞纸箱a的情况下,能够使吸附装置154的吸附力较低。对于规定的吸附位置以及规定的待机位置而言,与瓦楞纸箱a的结构对应地预先决定,并存储于存储部559。控制装置500从存储部559搜索并使用与在步骤s101中接受到的瓦楞纸箱a的结构对应的规定的吸附位置以及规定的待机位置。
[0093]
这里,在箱状瓦楞纸箱a中,侧部a1以及a3相互对置而构成该瓦楞纸箱a的长侧部,侧部a2以及a4相互对置而构成该瓦楞纸箱a的短侧部。在包围侧部a1~a4的周向上,长侧部比短侧部长。此外,在上述周向上,侧部a1以及a3的长度与侧部a2以及a4的长度也可以相
同。
[0094]
控制装置500针对第一手部150的吸附装置154的移动和第二手部160的移动,既可以并行执行,以便相互的至少一部分在时间上重叠,也可以分别依次执行。
[0095]
接着,如图5所示,在步骤s107中,控制装置500吸附最上层的折叠瓦楞纸箱a而使其开箱。控制装置500在吸附装置154到达规定的吸附位置后,使负压产生装置155启动,使吸附装置154产生负压。启动时刻也可以是到达前、与到达同时、以及到达后的任一时刻。而且,如图7所示,控制装置500当检测到基于吸附装置154进行的折叠瓦楞纸箱a的吸附时,使第一手部150上升。控制装置500也可以通过检测吸附装置154中的负压的产生,来检测折叠瓦楞纸箱a的吸附。控制装置500也可以基于负压产生装置155的负荷的变化、或者设置于吸附装置154、配管或负压产生装置155的压力传感器(未图示)的检测值等,来检测吸附装置154中的负压的产生。
[0096]
控制装置500使第二手部160也与第一手部150一同上升,直到第一手部150上升至第一规定的高度位置为止。并且,如图8所示,在到达第一规定的高度位置后,控制装置500边使第一手部150上升,边使第二手部160下降。下方部163与折叠瓦楞纸箱a的侧部a2抵接并向下方压下,在边界c12处折成山形,使折叠瓦楞纸箱a开箱。下方部163的主面163a的长边方向是与边界c12大致平行的水平方向,因此边界c12处的折弯顺畅且准确。例如,第一规定的高度位置也可以设为在折叠瓦楞纸箱a开始开箱后不与下方的第二层的折叠瓦楞纸箱a接触的高度位置。
[0097]
并且,如图9所示,当第一手部150上升至第二规定的高度位置时,控制装置500使第二手部160向第一方向d1a移动。侧方部162与瓦楞纸箱a的侧部a2抵接并向第一方向d1a压入,使侧部a2接近直立状态。控制装置500基于第一手部150以及第二手部160的位置关系,直到侧部a2成为与侧部a1大致垂直为止,继续第二手部160的移动。即,控制装置500通过将侧方部162按压在侧部a2,从而相对于侧部a1将侧部a2在边界c12处折弯。此时,控制装置500既可以以侧部a2的折弯角度成为目标折弯角度的方式折弯侧部a2,也可以以超过目标折弯角度的方式折弯。目标折弯角度是侧部a2与侧部a1垂直时的侧部a2的折弯角度,超过目标折弯角度的折弯角度是侧部a2与侧部a1所成的角度为锐角时的侧部a2的折弯角度。通过上述动作,瓦楞纸箱a成为被开箱成矩形筒状的状态。例如,第二规定的高度位置也可以设为开箱状态的瓦楞纸箱a不与第二层的折叠瓦楞纸箱a接触的高度位置。这里,侧部a2是第五被折弯部的一个例子。
[0098]
控制装置500针对第一手部150的上升、第二手部160的下降、以及第二手部160向第一方向d1a的移动,既可以分别依次执行,也可以并行执行,以便相互的至少一部分在时间上重叠。
[0099]
接着,如图5所示,在步骤s108中,控制装置500将开箱状态的瓦楞纸箱a的底部a5的底折翼a51~a54中的位于侧方的底折翼a52以及a54向里折进去。即,控制装置500执行第二折弯处理以及第三折弯处理。
[0100]
底折翼a51~a54被向里折进去,由此形成瓦楞纸箱a的底部a5。折弯前的底折翼a51~a54分别从侧部a1~a4向相同的方向延伸。底折翼a51以及a53为底部a5的长边的折翼,底折翼a52以及a54为底部a5的短边的折翼。另外,上折翼a61~a64被向里折进去,由此形成瓦楞纸箱a的顶部a6。折弯前的上折翼a61~a64分别从侧部a1~a4向与底折翼a51~
a54相反的方向延伸。例如,在步骤s101~s107中,底折翼a51~a54沿第二方向d2a延伸,上折翼a61~a64沿第二方向d2b延伸。底折翼a51以及a53中的一个是第一被折弯部的一个例子,底折翼a51以及a53中的另一个是第二被折弯部的一个例子,底折翼a54是第三被折弯部的一个例子,底折翼a52是第四被折弯部的一个例子。
[0101]
首先,如图10所示,控制装置500执行第二折弯处理。控制装置500使第一手部150向第一方向d1a移动,由此使底折翼a54与侧方辅助部件350的侧方抵接部351抵接并压入。由此,底折翼a54以使其前端朝向第一方向d1b的方式被向里折进去。侧方抵接部351延伸的方向是和底折翼a54与侧部a4的边界c45延伸的方向同样的方向,因此侧方抵接部351能够将底折翼a54沿着边界c45顺畅且准确地折进去。另外,控制装置500边使侧方部162的抵接面162a与侧部a2抵接,边使第二手部160与第一手部150同样地移动。由此,在底折翼a54的折进去时,可抑制瓦楞纸箱a的变形。
[0102]
并且,如图11所示,控制装置500执行第三折弯处理。控制装置500以第六轴s6b(参照图2)为中心使第二手部160转动,由此使侧方部162的抵接面162a与底折翼a52抵接,将抵接面162a的朝向从第一方向d1a改变为第二方向d2b。由此,侧方部162以使底折翼a52的前端朝向第一方向d1a的方式将底折翼a52折进去。此外,控制装置500为了调整抵接面162a的位置,也可以使第二手部160移动。
[0103]
控制装置500针对第二折弯处理以及第三折弯处理,既可以分别依次执行,也可以并行执行,以便相互的至少一部分在时间上重叠。
[0104]
接着,如图5所示,在步骤s109中,控制装置500将位于开箱状态的瓦楞纸箱a的底部a5的上下方向上的底折翼a51以及a53向里折进去。即,控制装置500执行第一折弯处理。
[0105]
首先,如图12所示,控制装置500使第二手部160转动,由此将侧方部162的抵接面162a的朝向从第二方向d2b改变为第一方向d1a,使抵接面162a与瓦楞纸箱a的侧部a2抵接。并且,控制装置500使第一手部150以及第二手部160移动,由此使底折翼a53位于下方辅助部件220的下方抵接部221以及222的上方。
[0106]
接着,如图13以及图14所示,控制装置500使第一手部150下降,由此使底折翼a53与下方抵接部221以及222抵接并被压入,以使底折翼a53的前端朝向上方的方式折弯底折翼a53。第二下方抵接部222延伸的方向和底折翼a53与侧部a3的边界c35延伸的方向同样,且是与底折翼a54被折弯的方向交叉的方向。因此,第二下方抵接部222能够将底折翼a53沿着边界c35顺畅且准确地折弯。
[0107]
接着,如图15以及图16所示,控制装置500停止上述下降,并使第一手部150的保持部153转动的同时,使第一手部150沿第二方向d2a移动。此时,使瓦楞纸箱a边以上折翼a61~a64朝向上方并直立的方式改变姿势,边沿第二方向d2a移动。底折翼a53被按压到下方抵接部221或222,进而被折进去。底折翼a51与上方辅助部件340的上方抵接部341抵接并被压入,以使底折翼a51的前端朝向底折翼a53的方式被折弯。即,通过边使底折翼a51以及a53与上方抵接部341以及下方抵接部221或222抵接,边转动保持部153,从而将底折翼a51以及a53折弯。此时,上方抵接部341以及第二下方抵接部222沿连结转动轴152的方向延伸。上方抵接部341在保持部153的转动方向上位于远离下方抵接部221以及222的位置。
[0108]
接着,如图17所示,控制装置500停止上述移动,并继续保持部153的转动的同时,使第一手部150下降。此时,瓦楞纸箱a在直立状态下向下方移动,底折翼a51被按压在上方
抵接部341,进而被向里折进去。控制装置500当保持部153成为直立状态时停止转动以及下降。此时,瓦楞纸箱a使底折翼a51以及a53为下方并且直立,而形成箱状瓦楞纸箱。
[0109]
接着,如图5以及图18所示,在步骤s110中,控制装置500使第一手部150向第一方向d1a移动,使箱状瓦楞纸箱a移动至输送装置320a与320b之间。此时,控制装置500也可以使箱状瓦楞纸箱a在载置于第一下方抵接部221上的状态下移动。
[0110]
接着,在步骤s111中,封缄装置330将胶带粘贴于由输送装置320a以及320b输送的箱状瓦楞纸箱a的底折翼a51以及a53的接缝,对箱状瓦楞纸箱a的底部a5进行封缄。
[0111]
如上述那样,实施方式所涉及的机器人系统1通过与在步骤s101以及s102中所输入的瓦楞纸箱a的结构以及指令对应地执行步骤s103~s111的处理,从而自动地执行使用机器人100的折叠瓦楞纸箱a的组装,即制箱。
[0112]
<效果等>
[0113]
实施方式所涉及的机器人系统1具备:第一手部150,其保持瓦楞纸箱a;第一臂130,其使第一手部150移动;以及上方抵接部341或下方抵接部221及222,其在保持于第一手部150的状态的瓦楞纸箱a的底折翼a51或a53被进行折弯的第一折弯处理时,与底折翼a51或a53抵接。并且,第一手部150具有:安装基部151,其与第一臂130连接;和保持部153,其能够相对于安装基部151转动,且通过使瓦楞纸箱a附着来保持该瓦楞纸箱a。第一手部150以及第一臂130构成为在第一折弯处理时,边使底折翼a51或a53、与上方抵接部341或者下方抵接部221或222抵接,边使保持部153转动,由此折弯底折翼a51或a53。
[0114]
根据上述结构,机器人系统1通过移动第一手部150且转动保持部153,从而能够将瓦楞纸箱a的底折翼a51或a53推碰到上方抵接部341或者下方抵接部221或222而折弯。由此,能够简化用于折弯底折翼a51或a53的第一手部150以及第一臂130的动作。并且,用于折弯底折翼a51或a53的结构只要包含第一臂130、具有可转动的保持部153的第一手部150、以及上方抵接部341或者下方抵接部221或222即可,能够进行简化。另外,上方抵接部341、和下方抵接部221以及222能够在第一方向d1上延长,因此能够对在第一方向d1上较长的底折翼a51或a53进行稳定的折弯。
[0115]
此外,上方抵接部341或第二下方抵接部222也可以沿第一折弯处理时的保持部153的连结转动轴152的方向延伸。根据上述结构,上方抵接部341或第二下方抵接部222形成与保持部153的转动方向大致垂直的方向的折痕,能够折弯底折翼a51或a53。例如,在第一折弯处理时,以连结转动轴152的方向与上方抵接部341或第二下方抵接部222延伸的方向同样的方式控制第一手部150的位置以及姿势,由此能够进行底折翼a51或a53的顺畅且准确的折弯。
[0116]
另外,保持部153的连结转动轴152的方向也可以是相对于安装基部151与第一臂130的连接方向交叉的方向。根据上述结构,第一手部150能够使保持部153沿与以第六轴s6a为中心的第一手部150的转动方向交叉的方向转动。因此,保持部153的位置以及姿势的自由度提高。
[0117]
另外,保持部153也可以构成为能够相对于安装基部151遍及至少90
°
的转动角度地转动。根据上述结构,第一手部150仅通过保持部153的转动,就能够使由保持部153保持的瓦楞纸箱a的姿势以例如使侧部a1从水平状态变为铅锤状态的方式变化。因此,由保持部153保持的瓦楞纸箱a的位置以及姿势的自由度提高。
[0118]
另外,保持部153也可以具有吸附瓦楞纸箱a的吸附装置154。根据上述结构,保持部153能够通过吸附,附着并保持瓦楞纸箱a。因此,保持部153能够进行减少对瓦楞纸箱a的表面带来的损伤等影响的保持。
[0119]
另外,实施方式所涉及的机器人系统1也可以具备上方抵接部341和下方抵接部221及222,该上方抵接部341和下方抵接部221及222在第一折弯处理时的保持部153的转动方向上相互远离地配置。并且,瓦楞纸箱a也可以包含相互对置地配置的底折翼a51以及a53。而且,第一手部150以及第一臂130构成为,在第一折弯处理时,使底折翼a51与上方抵接部341抵接,使底折翼a53与下方抵接部221或222抵接,由此折弯底折翼a51以及a53。根据上述结构,通过使保持部153转动而将底折翼a51以及a53分别推碰到上方抵接部341以及下方抵接部221或222,从而能够进行底折翼a51以及a53的折弯。因此,能够简化用于折弯底折翼a51以及a53的结构、和第一手部150以及第一臂130的动作。
[0120]
另外,实施方式所涉及的机器人系统1也可以具备侧方抵接部351,该侧方抵接部351在保持于第一手部150的状态的瓦楞纸箱a的底折翼a54被进行折弯的第二折弯处理时,供底折翼a54抵接。并且,底折翼a54也可以向与底折翼a51以及a53被折弯的方向交叉的方向被折弯。而且,第一手部150以及第一臂130也可以构成为,在第二折弯处理时,以将底折翼a54按压于侧方抵接部351的方式使瓦楞纸箱a移动,由此折弯底折翼a54。根据上述结构,通过使第一手部150向将底折翼a54按压于侧方抵接部351的方向移动,从而能够进行底折翼a54的折弯。因此,能够简化用于折弯底折翼a54的结构、和第一手部150以及第一臂130的动作。
[0121]
此外,侧方抵接部351也可以沿与底折翼a54被折弯的方向交叉的方向延伸。根据上述结构,侧方抵接部351能够形成侧方抵接部351延伸的方向的折痕,并折弯底折翼a54。由于折痕的方向与底折翼a54被折弯的方向交叉,所以能够进行底折翼a54的顺畅且准确的折弯。
[0122]
另外,实施方式所涉及的机器人系统1也可以具备第一手部150、第一臂130、第二手部160以及第二臂140。并且,瓦楞纸箱a也可以包含底折翼a52,该底折翼a52向与底折翼a51或a53被折弯的方向交叉的方向被折弯。而且,第二手部160以及第二臂140也可以构成为,在保持于第一手部150的状态的瓦楞纸箱a的底折翼a52被进行折弯的第三折弯处理时,使第二手部160边与底折翼a52抵接边转动,由此折弯底折翼a52。此外,机器人系统1也可以具备机器人主体120,该机器人主体120具有以能够在同轴上转动的方式配置的第一臂130以及第二臂140,机器人主体120也可以构成同轴双臂机器人。
[0123]
根据上述结构,通过使与底折翼a52抵接的第二手部160转动,从而能够进行底折翼a52的折弯。因此,能够简化用于折弯底折翼a52的结构、和第二手部160以及第二臂140的动作。另外,作为同轴双臂机器人的机器人主体120能够实现作业所需的空间的空间节省化。
[0124]
另外,也可以为,瓦楞纸箱a构成为,通过接受折弯处理而形成有底筒形状,第二手部160以及第二臂140通过使第二手部160与瓦楞纸箱a抵接,从而进行使瓦楞纸箱a形成并维持筒形状的辅助。根据上述结构,容易将瓦楞纸箱a开箱成筒形状。并且,抑制筒形状的瓦楞纸箱a在折弯处理时变形。因此能够进行在作为目标的位置处的顺畅且准确的折翼的折弯。
[0125]
此外,也可以为,瓦楞纸箱a构成为,通过接受折弯处理而形成有底方筒形状,第一手部150以及第一臂130通过保持瓦楞纸箱a并使其上升,从而使瓦楞纸箱a形成方筒形状,第二手部160以及第二臂140构成为,在使瓦楞纸箱a形成方筒形状时,使第二手部160从侧方抵接或推碰到瓦楞纸箱a,由此进行上述辅助。根据上述结构,容易将瓦楞纸箱a开箱成方筒形状。
[0126]
另外,第二手部160以及第二臂140也可以构成为,通过将第二手部160按压于瓦楞纸箱a,从而将形成方筒形状瓦楞纸箱a的第五被折弯部亦即侧部a2折弯到目标折弯角度以上。根据上述结构,以目标折弯角度以上被折弯后的侧部a2容易维持目标折弯角度,由此,瓦楞纸箱a容易维持作为目标的开箱状态的形状。因此,使底折翼a51~a54的折弯处理顺利。
[0127]
另外,瓦楞纸箱a也可以构成为,通过接受折弯处理而形成有底筒形状,底折翼a51~a54通过受到折弯处理而形成瓦楞纸箱a的底部a5。根据上述结构,机器人系统1能够将折叠瓦楞纸箱a组装成上部开放的箱状瓦楞纸箱。箱状瓦楞纸箱a仅通过接受底部a5的封缄,就能够用于物品的装入等。
[0128]
<其他实施方式>
[0129]
以上,对本公开的实施方式的例子进行了说明,但本公开并不限定于上述实施方式。即,能够在本公开的范围内进行各种变形以及改进。例如,通过对实施方式实施各种变形、以及组合不同的实施方式中的构成要素而构建的方式也包含在本公开的范围内。
[0130]
例如,在实施方式中,机器人主体120为水平多关节型机器人,但并不限定于此。例如,机器人主体120也可以构成为垂直多关节型机器人、极坐标型机器人、圆筒坐标型机器人、直角坐标型机器人、或其他机器人。并且,第一手部150以及第二手部160搭载于水平多关节型的第一臂130以及第二臂140,但并不限定于此。第一手部150以及第二手部160也可以搭载于相互不同的机型的臂。
[0131]
另外,在实施方式中,机器人主体120构成为具备第一臂130以及第二臂140的双臂机器人,但并不限定于此。例如,机器人主体120既可以仅具备一个臂,也可以具备3个以上的臂。例如,第一臂130以及第二臂140也可以搭载于不同的机器人主体。
[0132]
另外,在实施方式中,第一臂130以及第二臂140构成为具有相互连接的5个连杆,但并不局限于此,每一个连杆的数量既可以为4个以下,也可以为6个以上。
[0133]
另外,在实施方式中,吸附装置154构成为通过产生负压来吸附物体,但并不限定于此。例如,吸附装置154也可以构成为通过粘着力使物体附着。或,吸附装置154也可以具备由具有挠性的橡胶或树脂等构成的吸盘,并通过按压吸盘来吸附物体。并且,为了增加吸附力,也可以设置将吸盘的吸附面的空气吸出来的机构。
[0134]
另外,在实施方式中,载置面210相对于载置台200固定,但并不限定于此。例如,载置台200也可以具备使载置面210升降的升降装置。在该情况下,控制装置500控制升降装置,与载置面210上的多个折叠瓦楞纸箱a的组装的进行并行地使载置面210上升。由此,能够将最上层的折叠瓦楞纸箱a相对于机器人主体120的高度位置维持在恒定的位置。因此,无论第一臂130以及第二臂140的上下方向的动作范围的限制如何,机器人主体120都能够对载置面210上的所有的折叠瓦楞纸箱a进行组装处理。
[0135]
另外,在实施方式中,控制装置500使用由拍摄装置170拍摄到的图像,来检测载置
面210上的折叠瓦楞纸箱a相对于第一手部150的三维位置,但并不限定于此。例如,也可以在第一手部150等设置有测量第一手部150与折叠瓦楞纸箱a的距离的传感器。控制装置500也可以使用该传感器的测量距离,来检测第一手部150与折叠瓦楞纸箱a的位置关系。上述传感器的例子为光电传感器、激光传感器以及超声波传感器等。
[0136]
另外,在实施方式中,形成瓦楞纸箱a的底部a5的底折翼的数量并不限定于4个,既可以为1个以上3个以下,也可以为5个以上。在这样的情况下,机器人系统1也可以适当选择使用上方辅助部件340、下方辅助部件220、侧方辅助部件350、和第二手部160的侧方部162以及下方部163等,来组装折叠瓦楞纸箱a。
[0137]
另外,在实施方式中,控制装置500构成为,对机器人100、输送装置320a以及320b、封缄装置330进行控制,但并不限定于此。例如,输送装置320a以及320b和封缄装置330中的至少一个也可以由自身所具备的控制装置等其他控制装置控制。由此,可使用通用的输送装置以及封缄装置。
[0138]
附图标记说明
[0139]
1...机器人系统;120...机器人主体;130...第一臂;140...第二臂;150...第一手部;151...安装基部;152...连结转动轴;153...保持部;154...吸附装置;160...第二手部;221、222...下方抵接部(第一抵接部、第二抵接部);341...上方抵接部(第一抵接部、第二抵接部);351...侧方抵接部(第三抵接部);500...控制装置;a...瓦楞纸箱(物品);a2...侧部(第五被折弯部);a51、a53...底折翼(第一被折弯部、第二被折弯部);a52...底折翼(第四被折弯部);a54...底折翼(第三被折弯部)。