1.本实用新型涉及手术治疗辅助装置,具体是涉及一种脚踝关节腔穿刺治疗辅助装置。
背景技术:
2.类风湿性关节炎是一种以关节病变为主的慢性自身免疫性疾病,以滑膜增生、炎性细胞浸润及关节软骨和骨基质破坏为主要特征。踝关节炎为它的基础症状之一,是一种老年人常见病。踝关节炎主要表现为滑膜炎,会导致关节僵直、畸形并伴有积液,患者通常夜晚痛得睡不着觉,早晨起床还会出现晨僵,病情严重者还伴有活动障碍。
3.目前,医院对踝关节炎的主流治疗手段是进行关节腔穿刺治疗,但由于关节腔的不可视性,进行关节腔穿刺治疗必须借助ct/b超引导才能进行穿刺定位,而且采用人工穿刺还存在定位不精准、灵活性较差等缺点,再加上需要长期借用ct/b超,占用医疗设备资源,但是如果缺少ct/b超医疗设备的辅助,人工关节腔穿刺手术难以进行。
技术实现要素:
4.实用新型目的:针对以上缺点,本实用新型提供一种保证踝关节穿刺治疗的精度,减少医疗设备占用的脚踝关节腔穿刺治疗辅助装置。
5.技术方案:为解决上述问题,本实用新型采用一种脚踝关节腔穿刺治疗辅助装置,包括脚踝套、操作臂、滑片,所述脚踝套在脚踝关节部位设置十字槽,十字槽贯穿脚踝套而连通脚踝套内部和外部,所述滑片置于十字槽内,沿十字槽横向移动和纵向移动,所述滑片设置通孔,通孔连通脚踝套内部;所述操作臂的末端安装有注射器,操作臂用于移动注射器穿过滑片的通孔进行注射。
6.进一步的,所述操作臂包括若干第一舵机,若干第一舵机依次通过铰接相连,操作臂的一端铰接于脚踝套外部,操作臂另一端连接注射器固定器,注射器固定器用于固定注射器。
7.进一步的,所述注射器固定器包括两个夹持部件,所述夹持部件设置于相连第一舵机端部的两侧,两个夹持部件分别通过两个第二舵机与第一舵机连接。
8.进一步的,所述夹持部件为弯月形,且两个夹持部件的凹面相对。
9.进一步的,所述操作臂还包括自动给药装置,所述自动给药装置包括电动伸缩杆,电动伸缩杆一端与注射器固定器固定连接,另一端与注射器的推杆连接,电动伸缩杆延伸方向平行于注射器的延伸方向。
10.进一步的,所述滑片的通孔固定连接有针栓托柱,针栓托柱连通脚踝套内部。
11.进一步的,所述十字槽侧面设置切槽,滑片两侧卡入切槽,滑片在切槽内沿十字槽横向移动和纵向移动。
12.进一步的,还包括控制装置,所述控制装置固定于操作臂上,控制装置用于控制第一舵机和第二舵机的转动,以及控制电动伸缩杆的伸缩。
13.有益效果:本实用新型相对于现有技术,其优点是该脚踝关节保证穿刺手术准确定位患者关节病变位置,因此不需要患者在手术过程中一直借助ct/b超的辅助,减少医疗设备占用;在患者关节病变位置设置十字槽,操作臂控制注射器通过滑片在十字槽内进行一定范围内的横向和纵向移动,方便手术操作,保证注射器穿刺的精度;操作臂控制注射器,保证注射器的稳定性,提高手术的可靠性。
附图说明
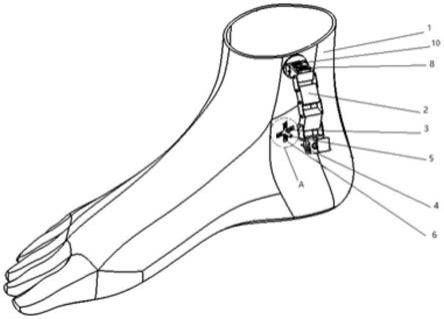
14.图1是本实用新型的整体结构示意图;
15.图2是本实用新型的主视图;
16.图3是本实用新型的侧视图;
17.图4是图1中a部分的局部放大图;
18.图5是本实用新型中滑片的结构示意图;
19.图6是本实用新型中针栓托柱的剖视图;
20.图7是本实用新型中自动给药装置的结构示意图;
21.图8是本实用新型中电动伸缩杆与连接板的连接示意图。
具体实施方式
22.如图1至图3所示,本实施例中一种脚踝关节腔穿刺治疗辅助装置,包括覆盖患者脚踝的脚踝套1、控制注射器9进行输送药物或抽取积液的操作臂2、滑片3,脚踝套1采用3d打印结构,根据患者足部数据和融合数据库中的数据,选择适合患者的脚踝套1,如图4所示,脚踝套1在患者脚踝关节病变部位设置十字槽6,十字槽6贯穿脚踝套1,连通脚踝套1的内部和外部,十字槽6侧面设置切槽,十字槽6的槽宽小于滑片3的宽度,滑片3两侧卡入切槽,十字槽6与滑片3配合,滑片3在切槽内沿十字槽6横向移动和纵向移动,从而精准定位穿刺部位,滑片3在十字槽6的中心处实现横向和纵向的换向。
23.如图5所示,在本实施例中滑片3为正方形,滑片3的中心位置设置通孔,通孔贯穿滑片3两侧,当滑片3位于切槽内时,通孔连通脚踝套1内部,滑片3的通孔处固定连接有针栓托柱5,针栓托柱5连通脚踝套1内部,如图6所示,针栓托柱5内部具备与注射器针栓形状贴合的凹槽,保证注射器9在注射时针头的稳定性。
24.操作臂2移动注射器9针头穿过针栓托柱5对患者病变关节部位进行穿刺治疗。操作臂2包括若干第一舵机,在本实施例中,操作臂2包括三节第一舵机,三节第一舵机依次相连,首端的第一舵机与脚踝套1外部连接,且位于十字槽6正上方,控制模块8通过控制第一舵机从而控制操作臂2实现注射器9三维层面上的精准移动,操作臂2始端与脚踝套1焊接,从而保证整个操作臂的稳定性,操作臂2末端的第一舵机连接注射器固定器4,注射器固定器4用于固定注射器9,注射器固定器4包括两个弯月形的夹持部件,两个夹持部件的凹面相对用于夹持注射器9,两个夹持部件通过销轴连接分别设置于末端的第一舵机端部的两侧,两个夹持部件分别通过两个第二舵机与第一舵机连接,第二舵机控制夹持部件的开合。通过操作臂2和针栓托柱5共同带动注射器9运动,实现注射器9的双重精准定位。
25.如图6所示,操作臂2还设置有自动给药装置,自动给药装置包括电动伸缩杆7,电动伸缩杆7延伸方向平行于注射器9的延伸方向,电动伸缩杆一端与注射器固定器4固定焊
接,另一端通过连接板与注射器9的推杆连接,连接板与注射器9的推杆可拆卸连接,电动伸缩杆7伸缩带动注射器9进行抽取和注射。
26.控制模块8胶接固定于操作臂2上,根据实际注射要求控制第一舵机的工作,从而控制操作臂2的移动,且通过控制第二舵机控制注射器固定器4对注射器9夹紧或松开,在进行治疗时,控制电动伸缩杆7的伸缩速度,从而控制药物的注射速度或者抽取积液的速度。在操作过程中,控制模块8接收操作臂2的移动数据,并将数据实时传输到计算机上,以便操作人员对操作臂2定位情况进行判断。
27.操作臂2上固定设置电源10,电源10通过螺钉固定于定位操作臂2始端上表面。采用7.4v2200mah锂电池,提高电池性能的同时降低了循环过程的动态内阻增幅,提高了装置的动力输出,电源10为第一舵机、第二舵机、电动伸缩杆7和控制模块8供电。
28.由于患者的脚踝数据不同,3d打印结构的脚踝套尺寸也不同,且患者关节病变位置不同,脚踝套上设置的十字槽6位置也不同,选择和患者脚踝尺寸及病变位置适配的脚踝套,通过控制模块8控制操作臂2精准定位病变位置,同时选择适用的注射器,通过注射器固定器的夹持,与针栓托柱配合实现在穿刺部位的精准移动,在减少依赖ct/b超医疗设备情况下,保证关节腔穿刺手术的精度。
技术特征:
1.一种脚踝关节腔穿刺治疗辅助装置,其特征在于,包括脚踝套(1)、操作臂(2)、滑片(3),所述脚踝套(1)在脚踝关节部位设置十字槽(6),十字槽(6)贯穿脚踝套(1)而连通脚踝套(1)内部和外部,所述滑片(3)置于十字槽(6)内,沿十字槽(6)横向移动和纵向移动,所述滑片(3)设置通孔,通孔连通脚踝套(1)内部;所述操作臂(2)的末端安装有注射器(9),操作臂(2)用于移动注射器(9)穿过滑片(3)的通孔进行注射。2.根据权利要求1所述的脚踝关节腔穿刺治疗辅助装置,其特征在于,所述操作臂(2)包括若干第一舵机,若干第一舵机依次通过铰接相连,操作臂(2)的一端铰接于脚踝套(1)外部,操作臂(2)另一端连接注射器固定器(4),注射器固定器(4)用于固定注射器(9)。3.根据权利要求2所述的脚踝关节腔穿刺治疗辅助装置,其特征在于,所述注射器固定器(4)包括两个夹持部件,所述夹持部件设置于相连第一舵机端部的两侧,两个夹持部件分别通过两个第二舵机与第一舵机连接。4.根据权利要求3所述的脚踝关节腔穿刺治疗辅助装置,其特征在于,所述夹持部件为弯月形,且两个夹持部件的凹面相对。5.根据权利要求4所述的脚踝关节腔穿刺治疗辅助装置,其特征在于,所述操作臂(2)还包括自动给药装置,所述自动给药装置包括电动伸缩杆(7),电动伸缩杆(7)一端与注射器固定器(4)固定连接,另一端与注射器(9)的推杆连接,电动伸缩杆(7)延伸方向平行于注射器(9)的延伸方向。6.根据权利要求1所述的脚踝关节腔穿刺治疗辅助装置,其特征在于,所述滑片(3)的通孔固定连接有针栓托柱(5),针栓托柱(5)连通脚踝套(1)内部。7.根据权利要求6所述的脚踝关节腔穿刺治疗辅助装置,其特征在于,所述十字槽(6)侧面设置切槽,滑片(3)两侧卡入切槽,滑片(3)在切槽内沿十字槽(6)横向移动和纵向移动。8.根据权利要求5所述的脚踝关节腔穿刺治疗辅助装置,其特征在于,还包括控制装置(8),所述控制装置(8)固定于操作臂(2)上,控制装置(8)用于控制第一舵机和第二舵机的转动,以及控制电动伸缩杆(7)的伸缩。
技术总结
本发明公开了一种脚踝关节腔穿刺治疗辅助装置,包括脚踝套、操作臂、滑片,所述脚踝套在脚踝关节部位设置十字槽,十字槽贯穿脚踝套而连通脚踝套内部和外部,滑片置于十字槽内,沿十字槽横向移动和纵向移动,滑片设置通孔,通孔连通脚踝套内部,操作臂的末端安装有注射器,操作臂用于移动注射器穿过滑片的通孔进行注射。在关节病变位置设置十字槽,操作臂移动注射器通过滑片在十字槽内进行一定范围内的横向和纵向移动,方便手术操作,保证注射器穿刺的精度;操作臂移动注射器,保证注射器的稳定性,提高手术的可靠性。设置十字槽保证穿刺手术准确定位患者关节病变位置,因此不需要患者在手术过程中一直借助CT/B超的辅助,减少医疗设备占用。疗设备占用。疗设备占用。
技术研发人员:王玲德 徐香翠 苏慧 蒋凯佳 邢本傲 朱林
受保护的技术使用者:扬州大学
技术研发日:2021.07.16
技术公布日:2022/1/28