1.本发明涉及医疗保健器械领域,具体涉及一种上肢骨科康复训练椅。
背景技术:
2.骨科是各大医院最常见的科室之一,进行骨科治疗的患者大部分为肢体受到损伤,骨科手术和术后康复训练的有效结合才是伤后肢体功能恢复的重要保证,在骨科治疗的病例中上肢损伤占有很大比例,为使患者的上肢功能及时恢复,患者在很长一段时间都需要进行康复训练,以恢复关节协调能力,改善血液循环,预防肌肉萎缩,然而患者并不具备自己进行康复训练的条件,通常需要有经验的医护人员对患者上肢进行康复训练,这是一项耗时费力且单调乏味的工作,长期的康复训练加大了医护人员的工作负担,也加重了患者的经济负担,因此,研制一种成本低廉、使用方便、效果可靠的上肢骨科康复训练器必然会带来可观的经济效益和社会效益。
技术实现要素:
3.为解决现有技术的不足,本发明的目的在于提供一中成本低、效果好的上肢骨科康复训练椅。
4.本发明采取的技术方案为:一种上肢骨科康复训练椅,包括椅架、臂高调节机构、左臂机构、右臂机构、座带机构、椅高调节机构。
5.作为优选,椅架后侧设有靠背,靠背上对应患者髋部和两肩位置设置有三个位置开关,可使患者在进行康复训练时保持立腰挺胸的标准坐姿,喇叭安装于靠背顶端,并可发出提示音实现人机交互。
6.作为优选,臂高调节机构中,滑板安装于靠背内部并构成移动副,第四电机通过蜗轮蜗杆结构驱动左臂机构的上下摆动,帮助患者实现左臂肩关节的上下摆动,右臂机构的上下摆动与左臂原理相同,第三电机通过丝杠可调节滑板高度,从而调节左臂机构和右臂机构的高度。
7.作为优选,左臂机构中,第一节臂与第二节臂转动连接可使患者实现肩关节的左右摆动,第二节臂与第三节臂转动连接可使患者实现肘关节的活动,转臂与第三节臂转动连接可使患者实现腕关节的活动;右臂机构与左臂机构在结构上呈左右对称关系。
8.作为优选,座带机构安装于椅架内部,移动带两侧设有两个环形链条,每个环形链条内部均设有三个链轮,移动带上侧为平整面,便于患者乘坐,第五电机可驱动链条的转动,从而实现移动带的移动。
9.作为优选,椅高调节机构中,四个椅腿均与椅架构成移动副,每个椅腿均通过一个丝杆与椅架实现连接,第六电机通过同步带驱动四个丝杆转动,从而实现训练椅的高度调节。
10.作为优选,靠背上对应患者髋部的位置开关横向设置,对应患者两肩的位置开关竖向设置。
11.作为优选,左臂机构和右臂机构上的腕关节训练力量的大小可进行调节。
12.作为优选,四个椅腿下端均安装有福马轮,可实现训练椅的转场移动和稳定支撑。
13.本发明的有益效果:
14.①
左臂机构和右臂机构根据人体手臂关节自由度进行设计,符合人体工学原理,从而可实现较好的康复训练效果。
15.②
靠背上对应髋部和两个肩部位置均设置有一个位置开关,可通过三点定位的方式,使患者在进行康复训练时保持立腰挺胸的坐姿,立腰挺胸的坐姿可减轻患者的脊背劳损,也有利于实现坐姿的标准化。
16.③
移动带可方便地将患者移动至标准位置,不仅减轻了患者负担,也使康复训练能实现更好的效果。
17.④
对应髋部的位置开关横向设置,便于患者髋部触动位置开关,对应左肩和右肩的位置开关竖向设置,从而使上身长度不同患者的双肩都能触动位置开关,适用范围广。
18.⑤
滑板上下移动可调节左臂机构和右臂机构的高度,使不同体型的患者均能调节至合适的位置。
19.⑥
四个福马轮不仅可实现康复训练椅的稳定支撑,还能方便实现康复训练椅的转场移动。
20.⑦
根据患者身体状况和训练阶段,可通过调整手轮的位置改变手腕力量训练的强度,原理简单,调整方便。
21.⑧
康复训练椅的升降通过丝杆的螺纹副实现,螺纹副具有自锁特点,可使升降平稳,锁止稳定。
附图说明
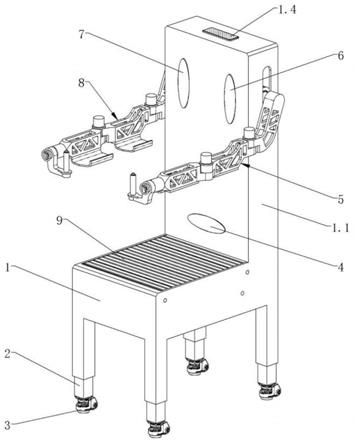
22.图1为本发明的整体结构示意图。
23.图2为本发明的整体结构示意图。
24.图3为左臂机构的结构示意图。
25.图4为左臂机构前端的爆炸示意图。
26.图5为靠背局部放大示意图。
27.图6为康复训练椅下部纵向局部剖视图。
28.图7为康复训练椅下部横向局部剖视图。
29.附图标号:1椅架、1.1靠背、1.2托槽、1.3横板、1.4喇叭、2椅腿、3福马轮、4第一位置开关、5左臂机构、6第二位置开关、7第三位置开关、8右臂机构、9移动带、10第一节臂、10.1转轴、11第一电机、12第二节臂、13第二电机、14第三节臂、14.1限位槽、14.2外插口、15手轮、15.1外棘轮、15.2弹簧压板、15.3外花键、16转臂、16.1手柄、16.2急停按钮、16.3内棘轮、16.4限位块、17第一托板、18第二托板、19弹簧、20内卷筒、20.1内花键、20.2内插口、21弹簧卷、22第三电机、23丝杠、24滑板、24.1丝杠滑块、25蜗轮、26蜗杆、27第四电机、28丝杆、29第一链轮、30冠齿轮、31第二链轮、32齿轮、33第五电机、34链条、35第三链轮、36第六电机、37同步带、38导向轮、39从动轮。
具体实施方式
30.下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
31.如图1、图6所示,所述的椅架1后侧设有靠背1.1,靠背1.1两侧对应设有竖向的长条孔,靠背1.1顶端设有喇叭1.4,椅架1内部为空腔结构,空腔结构后端设置有横板1.3,空腔结构上端两侧设置有托槽1.2。
32.如图3所示,所述的左臂机构5可对患者的左臂进行康复训练,包括第一节臂10、第一电机11、第二节臂12、第二电机13、第三节臂14、手轮15、转臂16、第一托板17、第二托板18、弹簧19、内卷筒20、弹簧卷21,其中第一节臂10内部为镂空结构,其后端横向设有转轴10.1,第一节臂10前端与第二节臂12后端转动连接,第一电机11固定安装于第一节臂10前端,第一电机11的输出轴与第二节臂12后端紧固连接,则第一电机11可驱动第二节臂12的转动,从而可帮助患者实现左臂肩关节的左右摆动,第二节臂12内部为镂空结构,其右侧下方固定设置有第二托板18,用于承托患者的左上臂,第二节臂12前端与第三节臂14后端转动连接,第二电机13固定安装于第二节臂12前端,第二电机13的输出轴与第三节臂14后端紧固连接,则第二电机13可驱动第三节臂14的转动,从而可帮助患者实现左臂肘关节的活动,第三节臂14内部为镂空结构,右侧下方固定设置有第一托板17,用于承托患者的左下臂。
33.如图4所示,所述的第三节臂14前端内部设有圆柱空腔结构,并且圆柱空腔结构侧壁设置有外插口14.2,第三节臂14前端还设置有限位槽14.1,所述的转臂16左侧上端为圆形结构,圆形结构后端设置有限位块16.4,圆形结构前端同轴设置有内棘轮16.3,转臂16右侧竖向设置有手柄16.1,手柄16.1可供患者左手进行握持,手柄16.1上端设置有急停按钮16.2,按动急停按钮16.2后所述康复训练椅会整机断电,转臂16左侧上端的圆形结构与第三节臂14前端转动连接,并且限位块16.4可在限位槽14.1内转动,使转臂16可相对于第三节臂14在90
°
的范围内转动,从而可帮助患者实现左臂腕关节的活动。
34.所述的手轮15前端为圆环结构,便于操作者进行拉动和转动,圆环结构后端同轴设施有外棘轮15.1,外棘轮15.1后端同轴设置有弹簧压板15.2,手轮15后端设置有外花键15.3,手轮15与转臂16左侧上端的圆形结构同轴转动安装,并且外棘轮15.1与内棘轮16.3啮合安装构成棘轮啮合结构,弹簧19同轴安装于转臂16左侧上端的圆形结构内,并且弹簧19前端与转臂16接触并压紧,弹簧19后端与弹簧压板15.2前端面接触并压紧,在弹簧19弹力作用下,手轮15有向后的移动趋势,从而使外棘轮15.1与内棘轮16.3紧贴啮合,使手轮15只能单向逆时针转动,所述的内卷筒20为圆柱结构,内卷筒20同轴安装于第三节臂14前端的圆柱空腔结构中,并构成转动副,内卷筒20外侧面设置有内插口20.2,内卷筒20中心设置有贯通的内花键20.1,外花键15.3与内花键20.1构成花键传动结构,则内卷筒20会随着手轮15进行转动,并且手轮15可相对于内卷筒20进行轴向移动,所述的弹簧卷21从内到外为顺时针螺旋弹簧结构,弹簧卷21安装于第三节臂14前端的圆柱空腔结构与内卷筒20外侧之间的空隙中,并且弹簧卷21外端头插入外插口14.2中并固定,弹簧卷21内端头插入内插口20.2中并固定。
35.在弹簧卷21的弹力作用下,内卷筒20和手轮15有顺时针转动的趋势,由于在自然状态下手轮15只能相对于转臂16逆时针转动,而不能相对于转臂16顺时针转动,则在外棘
轮15.1和内棘轮16.3的啮合传动作用下,转臂16也会有顺时针转动的趋势,从而限位块16.4会贴紧限位槽14.1的上边沿。
36.所述的右臂机构8可对患者的右臂进行康复训练,右臂机构8与左臂机构5在结构上呈左右对称关系。
37.所述的滑板24安装于靠背1.1内部,滑板24通过导轨滑块结构与靠背1.1构成移动副,滑板24横向中间位置设置有丝杠滑块24.1,所述的丝杠23转动安装于靠背1.1背侧,丝杠23与丝杠滑块24.1配合安装构成丝杠传动结构,所述的第三电机22内部集成有刹车机构,第三电机22通过螺钉固定安装于靠背1.1内部,第三电机22的输出轴与丝杠23同轴紧固连接,从而第三电机22可通过丝杠23驱动滑板24的上下移动,从而使所述康复训练椅可以适用于不同上身长度的患者。
38.所述的第一节臂10的转轴10.1穿过靠背1.1左侧的长条孔与滑板24左端转动连接,转轴10.1与蜗轮25同轴紧固连接,所述的蜗杆26与滑板24构成转动副并与蜗轮25构成蜗轮蜗杆传动结构,第四电机27通过螺钉与滑板24固定连接,第四电机27的输出轴与蜗杆26同轴紧固连接,则第四电机27可通过蜗轮蜗杆传动结构驱动左臂机构5的上下摆动,从而可帮助患者实现左臂肩关节的上下摆动,右臂机构8肩关节的上下摆动的结构及原理与上述左臂机构5的肩关节上下摆动的结构及原理相同。
39.如图1所示,所述的第一位置开关4安装于靠背1.1前侧下端的中间位置,第二位置开关6安装于靠背1.1上端左侧对应患者左肩的位置,第三位置开关7安装于靠背1.1上端右侧对应患者右肩的位置,其中第一位置开关4横向设置,便于患者髋部触动位置开关,第二位置开关6和第三位置开关7均竖向设置,从而使上身长度不同患者的双肩都能触动位置开关。
40.如图1、图6所示,所述的移动带9由排列成环状的硬质板条组成,移动带9两侧内部设置有两个环形链条34,每个硬质板条的两端均与两个链条34中的一个链节固定连接,每个环形链条34内部均设置有三个链轮,分别为第一链轮29、第二链轮31和第三链轮35,其中第二链轮31和第三链轮35位于相同高度,从而使第二链轮31和第三链轮35之间的移动带9呈水平状态,第一链轮29位于第二链轮31下方,两个第二链轮31通过一个转轴实现同轴紧固连接,冠齿轮30与上述转轴同轴紧固连接,从而使两个第二链轮31和冠齿轮30成为一个整体结构,两个第一链轮29通过一个转轴实现同轴连接,两个第三链轮35通过一个转轴实现同轴连接,移动带9通过上述三个转轴安装于椅架1内部的空腔结构中,并且第二链轮31和第三链轮35之间的链条34放置于对应的托槽1.2中,从而为患者提供稳定的乘坐支撑,第五电机33通过螺钉固定安装于横板1.3上,齿轮32与第五电机33的输出轴实现同轴紧固连接,并且齿轮32与冠齿轮30构成齿轮啮合传动,从而第五电机33可驱动两个链条34转动,进而实现移动带9的移动。
41.如图1、图6所示,所述的椅腿2数量为四个,四个椅腿2安装于椅架1下方四个角处,并均与椅架1构成移动副,每个椅腿2下端均安装有一个福马轮3,福马轮3作为万向脚轮使用时,可轻松实现所述康复训练椅的位置移动,福马轮3作为支点使用时,可实现稳定支撑并能微调高度用于找平椅面。
42.如图6、图7所示,所述的丝杆28数量为四个,四个丝杆28安装于椅架1靠近四个角的位置,四个丝杆28均与椅架1构成转动副,每个丝杆28与对应的椅腿2上端构成螺纹副,每
个丝杆28上端均同轴紧固连接有一个从动轮39,第六电机36通过螺钉固定安装于椅架1内部前端,主动轮与第六电机36输出轴实现同轴紧固连接,两个导向轮38设置于主动轮两侧用于增大主动轮的包角,同步带37缠绕于主动轮、两个导向轮38和四个从动轮39之间,从而第六电机36可通过同步带37同时驱动四个丝杆28的转动,使椅架1升高或降低,实现所述康复训练椅的高低调节,以适应不同身高的患者。
43.实施例一:需要转场移动时,首先将四个福马轮3上的支撑柱缩回,使四个脚轮支撑地面,双手扶持靠背1.1并将康复训练椅移动至合适位置后,将四个福马轮3上的支撑柱伸出并压紧地面,实现康复训练椅的稳定放置。
44.实施例二:康复训练椅可由上位机进行控制,将患者病情参数输入上位机后,上位机可自动制定适合患者的康复训练计划,并记录患者的训练情况。
45.实施例三:康复训练时,首先患者需要坐到移动带9上,第五电机33启动并使移动带9载着患者向后移动,直至患者髋部碰触到第一位置开关4后移动带9停止移动,喇叭1.4会提示患者将背部向后靠紧靠背1.1,患者双肩触动第二位置开关6和第三位置开关7后,将左臂放置于左臂机构5的两个托板上,左手握持左臂机构5前端的手柄16.1,将右臂放置于右臂机构8的两个托板上,右手握持右臂机构8前端的手柄,之后左臂机构5和右臂机构8按照上位机制定的训练计划对患者进行康复训练。
46.实施例四:转动转臂16可进行左手腕力量康复训练,逆时针转动转臂16后,通过内棘轮16.3与外棘轮15.1的啮合传递,使手轮15逆时针转动,手轮15通过外花键15.3与内花键20.1的传动使内卷筒20逆时针转动,逆时针转动的内卷筒20会带动弹簧卷21内端头逆时针转动,从而压缩弹簧卷21,顺时针转动转臂16可释放弹簧卷21,在反复转动转臂16过程中实现左手腕的力量康复训练。右手腕的力量康复训练原理与左手腕的力量康复训练原理相同。
47.实施例五:左手腕康复训练力度可以调整,首先向外拉动手轮15使外棘轮15.1脱离与内棘轮16.3的啮合,转动手轮15至合适角度后,将手轮15向内推回使外棘轮15.1与内棘轮16.3重新啮合,实现弹簧卷21的弹力调整,其中顺时针转动手轮15可降低弹簧卷21弹力,减轻左手腕的转动力度,适用于康复初期的训练,逆时针转动手轮15可增大弹簧卷21弹力,加重左手腕的转动力度,适用于康复后期的训练。右手腕力量训练强度的调节原理与左手腕力量训练强度的调节原理相同。