1.本实用新型涉及一种上肢康复机器人装置,属于医疗康复机械技术领域。
背景技术:
2.现有的机器人大多数将上肢结构和手指结构分开进行设计,只是针对部分关节进行康复训练,没有考虑到整个上肢的训练要求。手是人体比较精细的机构,微小空间内神经与血管相互交错,小型肌肉群遍布全手,这使得手指损伤的治疗比较困难,要求比较高,且治疗过程和康复周期时间相对较长。通常情况下,上肢偏瘫患者运动功能恢复是从肩部开始,手指是往往是最后恢复的。因此,在医学界,一些医院将手指的运动功能恢复情况作为上肢康复情况的标准。所以在机器人结构设计时要考虑将上肢与手指进行结合。
3.现有的大多数机器人结构比较庞大,不具有便携性,而且患者在家中不便于进行康复训练,这对患者的康复也会起到一些负面作用。一些机器人将执行机构和驱动机构分开,不仅增大了系统体积,而且降低了机器人的集成度。除此之外,机器人结构复杂,这导致机器人不具有轻便性,患者穿戴在身上还要克服较大的机构重量,这降低了康复训练的安全性。
4.在机器人的设计和运动时,没有考虑到机器人对患者的力学影响,这使得机器人在执行运动时容易对患者的关节进行二次损伤,不利于患者的康复。
技术实现要素:
5.为了克服现有技术的不足,本实用新型提供了一种上肢康复机器人装置,该装置适用于上肢康复训练工作中,能够自动引导患者进行上肢康复训练,使患者能够得到理想的康复效果。
6.本实用新型解决其技术问题所采用的技术方案是:一种上肢康复机器人装置,包括肩部支架、伺服电机a、小带轮、大带轮、同速带、连接板、大臂支架、伺服电机b、小齿轮、大齿轮、伺服电机c、推杆、小臂支架、连接柱、手部支架和手握杆。
7.伺服电机a安装连接于l形肩部支架长边面板的外侧,伺服电机a的驱动端固定连接着小带轮,大带轮位于肩部支架短边面板的外侧,大带轮通过平键与轮轴配合连接,轮轴安装连接于肩部支架短边面板中,大带轮与小带轮通过同速带相连接,伺服电机a、小带轮、大带轮和同速带组成了本装置的同速传动系统;连接板左端与大带轮轮轴安装连接,连接板右端通过内六角螺钉与弧形大臂支架的左端外侧固定连接,大臂支架的外侧偏右端固定连接有一与其垂直的支撑板,支撑板上固定连接有一伺服电机b,伺服电机b的驱动端通过平键固定连接着小齿轮,弧形齿条状的大齿轮上方的弧形滑块配合安装连接于大臂支架的弧形块的槽体中,小齿轮与大齿轮彼此相啮合连接,组成了肘部齿轮组,小齿轮位于大齿轮的外侧位置处,伺服电机c及其支架固定连接于大齿轮右侧底座的上方位置处,伺服电机c和肘部齿轮组组成了该装置的内外旋转传动系统;推杆通过丝杠螺母机构安装连接于伺服电机c的驱动端,大臂支架与小臂支架铰接连接,小臂支架的左侧上端连接着垂直方向的连
接柱,连接柱的上端部安装连接有弹性垫片,推杆的底端部与弹性垫片相连接,组成了该装置的屈伸传动系统;弧形的小臂支架的末端固定连接着手部支架,手部支架的两侧板之间固定连接着圆柱条状的手握杆,小臂支架、手部支架和手握杆组成了该装置的腕部机构。
8.在使用过程中,将该装置穿戴于手臂之上,单手手指抓握住手握杆,大臂置于大臂支架中,小臂置于小臂支架中,肩部支架上的伺服电机a的输出端驱动小带轮转动,小带轮通过与之连接的同速带来带动大带轮同时转动,小带轮、大带轮和同速带之间形成了带传动,大带轮则带动连接板和大臂支架及其小臂支架一同转动,这样来使人体的大臂抬起,用以实现肩部关节旋转运动和伸展运动;大臂支架上的伺服电机b的输出端驱动小齿轮旋转,通过小齿轮与大齿轮的啮合连接,小齿轮则驱动大齿轮旋转,大齿轮带动其底座及伺服电机c和小臂支架共同旋转,小齿轮和大齿轮的啮合传动带动了大齿轮的转动,从而使肘部转动,用以实现大臂和小臂的内外旋转运动;伺服电机c通过丝杠螺母机构带动推杆推动连接柱,由连接柱带动小臂支架和手部支架转动,这样来带动小臂向上抬起,进而使小臂支架完成旋转运动,从而使肘部完成收缩和伸展运动,以达到训练的目的。
9.本实用新型的有益效果是:本实用新设计合理、操作方便,安全实用,本装置采用了d-h方法,可以实现各种角度的运动,主要手臂的旋转、肘部的伸缩以及肩部的上下运动;装置中伺服电机是动力源,可以更好地推动康复训练,缩短康复周期,同时整体结构更加便捷,使用时也更加简便,增加了康复的舒适度以及康复效率,利于推广使用。
附图说明
10.下面结合附图和具体实施方式对本实用新型进一步说明。
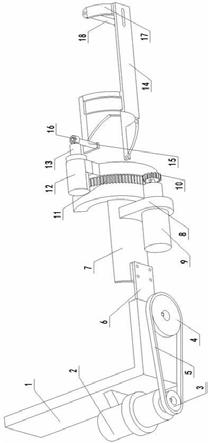
11.图1是本实用新型的结构示意图。
12.图2是本实用新型的大臂机构示意图。
13.图3是本实用新型的肘部机构示意图。
14.图4是本实用新型的肩部机构示意图。
15.图中标号:
16.1、肩部支架,2、伺服电机a,3、小带轮,4、大带轮,5、同速带,6、连接板,7、大臂支架,8、支撑板,9、伺服电机b,10、小齿轮,11、大齿轮,12、伺服电机c,13、推杆,14、小臂支架,15、连接柱,16、弹性垫片,17、手部支架,18、手握杆。
具体实施方式
17.如图1—4所示,一种上肢康复机器人装置,包括肩部支架1、伺服电机a2、小带轮3、大带轮4、同速带5、连接板6、大臂支架7、伺服电机b9、小齿轮10、大齿轮11、伺服电机c12、推杆13、小臂支架14、连接柱15、手部支架17和手握杆18,伺服电机a2安装连接于l形肩部支架1长边面板的外侧,伺服电机a2的驱动端固定连接着小带轮3,大带轮4位于肩部支架1短边面板的外侧,大带轮4通过平键与轮轴配合连接,轮轴安装连接于肩部支架1短边面板中,大带轮4与小带轮3通过同速带5相连接,伺服电机a2、小带轮3、大带轮4和同速带5组成了本装置的同速传动系统;连接板6左端与大带轮4轮轴安装连接,连接板6右端通过内六角螺钉与弧形大臂支架7的左端外侧固定连接,大臂支架7的外侧偏右端固定连接有一与其垂直的支撑板8,支撑板8上固定连接有一伺服电机b9,伺服电机b9的驱动端通过平键固定连接着小
齿轮10,弧形齿条状的大齿轮11上方的弧形滑块配合安装连接于大臂支架7的弧形块的槽体中,小齿轮10与大齿轮11彼此相啮合连接,组成了肘部齿轮组,小齿轮10位于大齿轮11的外侧位置处,伺服电机c12及其支架固定连接于大齿轮11右侧底座的上方位置处,伺服电机c12和肘部齿轮组组成了该装置的内外旋转传动系统;推杆13通过丝杠螺母机构安装连接于伺服电机c12的驱动端,大臂支架7与小臂支架14铰接连接,小臂支架14的左侧上端连接着垂直方向的连接柱15,连接柱15的上端部安装连接有弹性垫片16,推杆13的底端部与弹性垫片16相连接,组成了该装置的屈伸传动系统;弧形的小臂支架14的末端固定连接着手部支架17,手部支架17的两侧板之间固定连接着圆柱条状的手握杆18,小臂支架14、手部支架17和手握杆18组成了该装置的腕部机构。
18.在使用过程中,将该装置穿戴于手臂之上,单手手指抓握住手握杆18,大臂置于大臂支架7中,小臂置于小臂支架14中,肩部支架1上的伺服电机a2的输出端驱动小带轮3转动,小带轮3通过与之连接的同速带5来带动大带轮4同时转动,小带轮3、大带轮4和同速带5之间形成了带传动,大带轮4则带动连接板6和大臂支架7及其小臂支架14一同转动,这样来使人体的大臂抬起,用以实现肩部关节旋转运动和伸展运动;大臂支架7上的伺服电机b9的输出端驱动小齿轮10旋转,通过小齿轮10与大齿轮11的啮合连接,小齿轮10则驱动大齿轮11旋转,大齿轮11带动其底座及伺服电机c12和小臂支架14共同旋转,小齿轮10和大齿轮11的啮合传动带动了大齿轮11的转动,从而使肘部转动,用以实现大臂和小臂的内外旋转运动;伺服电机c12通过丝杠螺母机构带动推杆13推动连接柱15,由连接柱15带动小臂支架14和手部支架17转动,这样来带动小臂向上抬起,进而使小臂支架14完成旋转运动,从而使肘部完成收缩和伸展运动,以达到训练的目的。