1.本发明涉及医疗设备领域,具体涉及一种智能化多普勒血流检测仪。
背景技术:
2.多普勒血流检测仪是医疗领域中血管外科、口腔科等科室中广泛采用的一种血流参数检测仪器,其使用方式简单,通过探头与人体皮肤接触,即可准确的探知皮下动脉、静脉等血流诊疗参数,为病患的康复、医生的诊疗观察提供重要的数据参考。多普勒血流检测仪大体上包括便携式和台式两种,前者尺寸与家用座机相当,后者与电脑相当;前者能够满足最为简单的血流参数采集需求,但近年来,随着对智能化医疗的要求越来越高,这种简单的便携式血流检测仪,已经无法满足日常的使用需求,例如:1、对血流参数的图像化展示,这就需要仪器具备一个便于观看的大屏;2、对诊疗参数的中心化汇总,这就需要仪器具备众多的扩展接口,以及信号收发、参数上传等功能模块。3、为了节省医疗人力资源,该仪器就应当具备足够的智能化程度,能够按照预设参数主动识别待检测对象,在病房内实现自主检测等。为此,台式的智能多普勒血流检测仪目前已成为主流的发展方向,相对于便携式的多普勒血流检测仪而言。然而台式的多普勒血流检测仪伴随着功能的多样化、智能化程度的上升,体积和重量均有所变大,与之关联的,其便携性有所降低,医护人员在搬运仪器的过程都将变得十分复杂,使用不便,且在临床使用中灵活性、自主性还有待提升。
技术实现要素:
3.本发明的目的在于提供一种智能化多普勒血流检测仪,具有自动检测功能,具备高自动化、智能化水平,能够极大的缓解医疗人力资源匮乏的现状。
4.为实现上述发明目的,本发明所采用的技术方案是:一种智能化多普勒血流检测仪,包括智能移动底座和搭载在智能移动底座上的位置调节平台,所述位置调节平台上设置有终端总控制器和检测器;所述智能移动底座、位置调节平台和检测器均与终端总控制器电性连接,并受控于终端总控制器;所述终端总控制器与中心服务器无线通讯连接;
5.所述检测器包括用于确定患者待检测部位位置的定位机构、用于对待检测部位进行检测的检测探头、以及用于带动检测探头动作的检测机械臂;所述定位机构、检测探头和检测机械臂均与终端总控制器电性连接;
6.所述位置调整平台包括设置在智能移动底座上表面的电动转盘,所述电动转盘的顶部设置有高度调节伸缩杆,所述高度调节伸缩杆的顶部设置有横板;所述横板上方设置有顶板;所述顶板与横板之间设置有横向调节伸缩杆,所述横向调节伸缩杆的悬伸端设置有l形的安装板;
7.所述终端总控制器设置在顶板的上表面,所述检测机械臂固定设置在安装板的下表面,所述检测探头安装在检测机械臂的操作端。
8.优选的,所述定位机构包括粘贴在患者待检部位的粘附式靶标,以及设置在安装板上的用于检测粘附式靶标位置的靶标位置传感器。
9.优选的,所述安装板上还设置有视频采集器、声音采集器和扬声器,所述视频采集器、声音采集器和扬声器与终端总控制器电性连接。优选的,所述智能移动底座包括座体和设置在座体底部的agv小车,所述agv小车与终端总控制器电性连接,所述agv小车为电磁导引式agv小车。
10.优选的,所述座体上还设置有支撑机构,所述支撑机构包括多根呈环形均匀分布在座体侧面的支撑套管,支撑套管由靠近座体的一端朝另一端斜向下延伸;所述支撑套管内穿设有相适配的支撑腿,所述支撑腿与支撑套管构成滑动连接;所述支撑机构还包括同步驱动组件,所述同步驱动组件用于驱动支撑腿张开,以形成对agv小车的离地支撑。
11.优选的,所述同步驱动组件包括设置在座体内中心的竖向的中心轴、以及固定设置在中心轴外的驱动盘;所述中心轴与支撑驱动电机构成传动连接;所述支撑驱动电机与终端总控制器电性连接;
12.所述驱动盘的盘面上对应支撑腿的数量设置有多道弧形的横向驱动孔,所述驱动盘的边沿设置有环形的挡边,所述挡边上对应支撑腿的数量设置有多道弧形的纵向驱动孔;
13.所述支撑腿的内端设置有水平的驱动段,所述驱动段上设置有竖向的水平传动销,所述水平传动销上设置有横向的升降传动销;所述水平传动销和升降传动销分别穿设在横向驱动孔和纵向驱动孔内,并与横向驱动孔和纵向驱动孔构成滑动配合。
14.优选的,所述检测探头通过柔性连接器与检测机械臂的操作端连接,所述柔性连接器包括关节轴承、连接板、端套和弹性拉绳,所述关节轴承的顶部设置有用于与检测机械臂的操作端连接的连接板;所述检测探头穿设在关节轴承的内圈内,并与关节轴承的内圈固接;所述检测探头靠近两端的位置设置有端套,所述端套与关节轴承的外圈之间通过多根弹性拉绳连接;多根所述弹性拉绳绕检测探头的中心呈环形均匀分布。
15.优选的,所述支撑腿为空心管,所述支撑腿与支撑套管相对一段的表面设置有沿支撑腿长度方向延伸的条形孔;所述支撑腿内部设置有与支撑腿内腔相配合的活塞,所述活塞与连杆连接;所述连杆穿过条形孔与支撑套管固接;
16.所述支撑腿的外端还设置有负压吸头,所述负压吸头与支撑腿的内部连通;所述负压吸头包括空心的外壳,所述外壳底部的中心设置有竖向的中心套,所述中心套延伸至外壳的内部,中心套上端的周面上设置有第一边棱,中心套的侧壁上设置有第一导通孔;所述中心套内设置有与中心套相配合的滑动帽,所述滑动帽的上端延伸超出中心套,且滑动帽上端的边沿设置有第二边棱,滑动帽的侧壁上设置有第二导通孔;所述第一边棱与第二边棱之间设置有封闭弹簧;
17.所述封闭弹簧处于自然状态时,滑动帽的下端延伸至中心套外,且第一导通孔与第二导通孔相互交错;所述滑动帽被完全压至中心套内时,所述封闭弹簧处于拉伸状态,且第一导通孔与第二导通孔相互连通。
18.优选的,所述中心套与滑动帽之间设置有气密胶圈。
19.优选的,所述外壳底面的中心设置有橡胶接触圈,所述橡胶接触圈绕设在中心套的下端开口外。
20.优选的,所述滑动帽底部的中心设置有接触杆,所述接触杆通过短杆与滑动帽连接。
21.本发明的有益效果集中体现在:
22.1、本发明通过预先在中心服务器设置检测策略和检测路径,智能移动底座能够根据预设将本发明自动移动至各病房,解决了检测仪在病房、病床之间的自动运行、精准运行的问题。
23.2、本发明通过位置调整平台能够对检测器的主体方位进行初步调整,再配合定位机构对待检测部位进行定位,检测机械臂能够带动检测探头精确的对病患的待检测部位进行自动检测,并将信息自动回传至中心服务器。无需任何人为干涉,真正的实现了自动化、无人化检测。开辟了一种远程检测的新路径,解决了医疗资源紧张的难题。
附图说明
24.图1为本发明电路部分的结构框图;
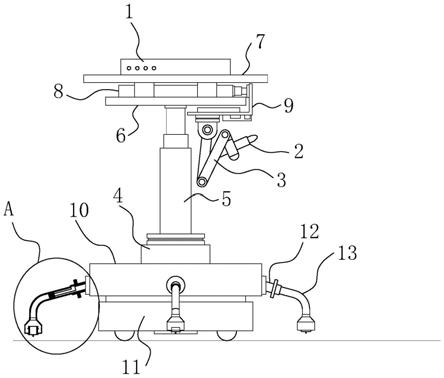
25.图2为本发明的主视图;
26.图3为图2中所示结构一种使用状态的结构示意图;
27.图4为支撑腿内端的驱动段的结构示意图;
28.图5为驱动盘的俯视图;
29.图6为驱动盘一种使用状态的俯视图;
30.图7为纵向驱动孔的结构示意图;
31.图8为柔性连接器的结构示意图;
32.图9为图2中a部放大图;
33.图10为图9中b部放大图。
具体实施方式
34.如图1-10所示的,一种智能化多普勒血流检测仪,包括智能移动底座和搭载在智能移动底座上的位置调节平台,所述智能移动底座用于实现本发明在病房、病床间的自主行走,一般所述智能移动底座包括座体10和设置在座体10底部的agv小车11,所述agv小车11与终端总控制器1电性连接,所述agv小车11为电磁导引式agv小车。通过在医院的走廊、病房等内铺设、粘贴电磁引导轨道,即可以利用agv小车10实现本发明的自动转移,无需人工介入,自动化、智能化程度更高。
35.所述位置调节平台上设置有终端总控制器1和检测器,所述终端总控制器1用于实现本发明的终端总体控制,包括行走、位置调整、定位、检测等等。所述智能移动底座、位置调节平台和检测器均与终端总控制器1电性连接,并受控于终端总控制器1。所述终端总控制器1与中心服务器无线通讯连接,以将检测数据汇总至中心服务器进行统一归档,同时能够通过中心服务器下发控制指令,实现远程中心化控制的功能。
36.本发明所述检测器包括用于确定患者待检测部位位置的定位机构、用于对待检测部位进行检测的检测探头2、以及用于带动检测探头2动作的检测机械臂3。所述定位机构、检测探头2和检测机械臂3均与终端总控制器1电性连接,并通过终端控制器1实现控制信号的下发和接收。本发明所述的定位机构用于定位出待检测部位,终端控制器1据此分析构建出检测逻辑,并下发至检测机械臂3,由检测机械臂3带动检测探头2完成检测。
37.所述的定位机构可采用图像分析定位的方式,在这种情况下,定位机构通常包括
多个用于拍摄待检测部位的倾斜摄影的摄像头,摄像头通过采集病患图片,并对图片进行分析,先对预设的待检测位置进行初步定位。然后再通过多个摄像头,采集倾斜摄影图像,通过对多张倾斜摄影图像的综合分析处理,构建出待检测部位的空间坐标模型,并据此进行检测。图像倾斜摄影定位的方法为现有技术中的成熟手段,在本发明中不再对此进行赘述。
38.当然,为了简化定位的方法,本发明的定位机构还可以是包括粘贴在患者待检部位的粘附式靶标,以及设置在安装板9上的用于检测粘附式靶标位置的靶标位置传感器。粘附式靶标可预先粘贴在病患的待检测部位,靶标位置传感器通过对粘附式靶标位置的识别,寻找到待检测部位,并据此构建检测逻辑。粘附式靶标和靶标位置传感器可采用射频识别的形式,简而言之粘附式靶标就是一个射频标签,靶标位置传感器就是多个射频读写器,多个靶标位置传感器在运动的过程中通过对射频标签强度的判定,分析得出粘附式靶标的物理空间位置。当然,在起到相同作用的情况下,采用其他的方式构建定位机构亦是可行的。
39.在定位机构定位好待检测部位的物理空间坐标模型后,终端总控制器1下达检测指令,检测机械臂3根据模型带动检测探头2运动,从而到达指定位置,并按照指定的检测策略对病患进行血流检测。
40.本发明所述位置调整平台用于对检测器的总体方位进行初步调节,例如:朝向、高度、延伸长度等等。如图2和3中所示,包括设置在智能移动底座上表面的电动转盘4,所述电动转盘4的顶部设置有高度调节伸缩杆5,所述高度调节伸缩杆5的顶部设置有横板6。所述横板6上方设置有顶板7。所述顶板7与横板6之间设置有横向调节伸缩杆8,所述横向调节伸缩杆8的悬伸端设置有l形的安装板9。所述终端总控制器1设置在顶板7的上表面,所述检测机械臂3固定设置在安装板9的下表面,所述检测探头2安装在检测机械臂3的操作端。
41.在检测的过程中,由于检测探头2需要与人体进行接触,若单纯利用检测机械臂3的运动带动检测探头2,会过于机械化,导致患者的恐惧心理。为此,本发明更好的做法是,如图8中所示,所述检测探头2通过柔性连接器22与检测机械臂3的操作端连接,所述柔性连接器22包括关节轴承23、连接板24、端套25和弹性拉绳26,所述关节轴承23的顶部设置有用于与检测机械臂3的操作端连接的连接板24。所述检测探头2穿设在关节轴承23的内圈内,并与关节轴承23的内圈固接。所述检测探头2靠近两端的位置设置有端套25,所述端套25与关节轴承23的外圈之间通过多根弹性拉绳26连接。多根所述弹性拉绳26绕检测探头2的中心呈环形均匀分布。在检测探头2工作的过程中,通过关节轴承23和弹性拉绳26的协同,能够自动适应不同的检测角度,具有一定的柔性变形裕度,提高了检测的舒适性。
42.当然,为了进一步完善本发明的性能,本发明通常还具备功能扩展机构,通过功能扩展机构实现语音通话、视频通话等等功能,一般功能扩展机构设置在安装板上,且包括视频采集器、声音采集器、扬声器、显示器等等。也就是说,所述安装板9上还可以设置有视频采集器、声音采集器、扬声器、显示器等,并与终端总控制器1电性连接。所述视频采集器和声音采集器用于进行视频音频通话,扬声器可用于进行远程指导和医嘱下达。显示器可以在床畔对检测参数进行实时展示。
43.为了保证本发明在检测过程中的稳定性,降低缓解干扰,提高检测精准度。本发明更好的做法还可以是,所述座体10上还设置有支撑机构,所述支撑机构包括多根呈环形均
匀分布在座体10侧面的支撑套管12,支撑套管12由靠近座体10的一端朝另一端斜向下延伸。所述支撑套管12内穿设有相适配的支撑腿13,所述支撑腿13与支撑套管12构成滑动连接。所述支撑机构还包括同步驱动组件,所述同步驱动组件用于驱动支撑腿13张开,以形成对agv小车11的离地支撑。也就是说,在移动过程中,本发明直接通过agv小车11着地支撑,在检测过程中,则不再利用agv小车11进行支撑,而是通过支撑腿13将本发明整体架起。
44.关于支撑腿13的驱动形式,可以是在底座10内对应每一根支撑腿13设置一个气缸、直线电机等运动部件,但这种方式由于源动部件的增大,一方面提高了底座10内部件的整体布局难度,另一方面也会极大的提高成本和整体重量。为此,结合图4-7中所示,本发明所述同步驱动组件包括设置在座体10内中心的竖向的中心轴14、以及固定设置在中心轴14外的驱动盘15。所述中心轴14与支撑驱动电机构成传动连接。所述支撑驱动电机与终端总控制器1电性连接。通过驱动盘15的转动,同时实现对多个支撑腿13斜朝下的驱动。
45.具体而言,如图4、5和7中所示,所述驱动盘15的盘面上对应支撑腿13的数量设置有多道弧形的横向驱动孔16,所述驱动盘15的边沿设置有环形的挡边17,所述挡边17上对应支撑腿13的数量设置有多道弧形的纵向驱动孔18。所述支撑腿13的内端设置有水平的驱动段19,所述驱动段19上设置有竖向的水平传动销20,所述水平传动销20上设置有横向的升降传动销21。所述水平传动销20和升降传动销21分别穿设在横向驱动孔16和纵向驱动孔18内,并与横向驱动孔16和纵向驱动孔18构成滑动配合。
46.在驱动盘15的转动过程中,通过横向驱动孔16与水平传动销20进行支撑腿13的横向推送,通过升降传动销21和纵向驱动孔18进行支撑腿13的竖向推送,二者同步配合,实现支撑腿13的斜向推送。当然,纵向驱动孔18和横向驱动孔16的设置位置、设置弧形幅度等应当相互适配,以实现横向和纵向的同步驱动,以及多根支撑腿13的同步驱动。
47.在此基础上,为了进一步提高支撑腿13在完成支撑后的稳定性,本发明还通过支撑腿13端部对地面施加一定的负压吸附力来提高稳定性。结合图2、9和10中所示,根据图9可以看出,所述支撑腿13为空心管,所述支撑腿13与支撑套管12相对一段的表面设置有沿支撑腿13长度方向延伸的条形孔27。所述支撑腿13内部设置有与支撑腿13内腔相配合的活塞28,所述活塞28与连杆29连接。所述连杆29穿过条形孔27与支撑套管12固接。也就是说,在支撑腿13朝外伸出的过程中,活塞28相对支撑腿13形成运动,在活塞28与支撑腿13的端头部分形成负压,从而为支撑腿13的端头形成吸附提供基础。
48.当然,为了形成吸附,所述支撑腿13的外端还设置有负压吸头30,所述负压吸头30与支撑腿13的内部连通。所述负压吸头30需要具备以下功能:1、一个用于吸附地面的吸附嘴(也就是下文中提到的中心套32的下端开口);2、该吸附嘴在负压吸头30未与地面接触时,处于封闭的状态,不影响负压吸头30内部的负压环境的构建;并在与地面完全接触后打开,与负压吸头30内部连通,实现吸附。为此,如图10中所示,本发明所述负压吸头30包括空心的外壳31,所述外壳31底部的中心设置有竖向的中心套32,所述中心套32延伸至外壳31的内部,中心套32上端的周面上设置有第一边棱33,中心套32的侧壁上设置有第一导通孔34。所述中心套32内设置有与中心套32相配合的滑动帽35,所述滑动帽35的上端延伸超出中心套32,且滑动帽35上端的边沿设置有第二边棱36,滑动帽35的侧壁上设置有第二导通孔37。所述第一边棱33与第二边棱36之间设置有封闭弹簧38。
49.所述封闭弹簧38处于自然状态时,滑动帽35的下端延伸至中心套32外,且第一导
通孔34与第二导通孔37相互交错。所述滑动帽35被完全压至中心套32内时,所述封闭弹簧38处于拉伸状态,且第一导通孔34与第二导通孔37相互连通。
50.在使用中,当支撑腿13朝外伸出的过程中,支撑腿13位于活塞28后方的一段以及负压吸头30共同形成的负压段内气压降低,相对外界形成负压,但此时负压还不足以克服封闭弹簧38的弹力,处于负压的构建阶段;当支撑腿13的下端,也就是负压吸头30的下端与地面接触时,滑动帽35下端受到压力,被压缩回中心套32内部,此时第一导通孔34与第二导通孔37切换至连通的状态,在中心套32下端开口部位形成负压吸力。当然,地面可直接施加压力在滑动帽35的下端,也可以是所述滑动帽35底部的中心设置有接触杆41,所述接触杆41通过短杆与滑动帽35连接,这种情况下可利用接触杆41将滑动帽35内推。
51.为了进一步提高中心套32和滑动帽35之间的气密性能,所述中心套32与滑动帽35之间设置有气密胶圈39。为了提高中心套32下端的吸附嘴与地面之间的接触性,所述外壳31底面的中心设置有橡胶接触圈40,所述橡胶接触圈40绕设在中心套32的下端开口外。