1.本发明涉及注射器领域,尤其涉及一种电子微量注射的智能控制系统及注射方法。
背景技术:
2.市面现有产品(微量快速多次注射产品)只是简单的以固定速度推注药液到一个刻度,不管注射效果如何,就回退完成注射,实际注射到体内的注射量与目标注射量有很大偏差,在后续注射中会有很大积累误差,除了影响全部注射过程的均匀一致性,还带来了后程更大的痛感和漏液,及目标量值最后不能完全注射完成,另外,由于回退释放压力的不确定性,导致整个注射效率的降低。
技术实现要素:
3.本发明的目的是提供一种电子微量注射的智能控制系统及注射方法。
4.为了实现上述目的,本发明的技术方案是:
5.一种电子微量注射的智能控制系统,其特征在于,包括整机、注射器手柄和注射器,所述整机包括整机主控板,所述整机主控板的各引脚分别接至显示屏、电磁阀、负压泵和电源开关的一端以及气路四通,所述气路四通通过空气过滤器接至注射器手柄和针头,所述注射器手柄包括推头、卡扣、针头固定件和手柄主控板,所述手柄主控板的各引脚分别接至编码电机和推力检测器。
6.进一步地,所述整机与适配器连接,所述适配器将交流220v转换成直流12v为整机控制器供电,所述整机由脚踏开关控制开闭。
7.进一步地,所述整机主控板通过压力传感器管路接至气路四通的第一端,所述电磁阀通过电磁释放气管接至气路四通的第二端,所述负压泵通过负压吸气管接至气路四通的第三端,所述气路四通的第四端与空气过滤器的一端连接。
8.进一步地,所述空气过滤器的另一端通过负压输出导管与手柄负压气管连接,所述整机主控板通过手柄电源通讯线接至手柄连线的一端,所述手柄负压气管接至手柄连线的一端,所述手柄连线的另一端与通讯连线的一端连接,所述通讯连线的另一端接至注射器手柄。
9.进一步地,所述手柄连线的另一端还与气路铜接头的一端连接,所述气路铜接头的另一端与可拆装清洁软管的一端连接,所述可拆装清洁软管的另一端与针头连接。
10.进一步地,所述手柄连线的另一端与气路铜接头的一端连接,所述气路铜接头的另一端通过清洁软管与针头连接。
11.进一步地,所述手柄主控板设有电机驱动器和电流检测器。
12.一种电子微量注射的注射方法,其特征在于,包括以下步骤:
13.步骤s1)使用针管推杆排气后的起始点,基准气压点,以此为基准,第一针前行到达最大压力控制点;
14.步骤s2)第一针继续前行,到达前行结束点,保持不动,释放针管内压力;
15.步骤s3)保持前行结束点,和上一次采样比较,如果与上一次采样偏差小,确定此前行结束点为回退点;
16.步骤s4)快速回退固定时间,回退到基准气压点,做回退完成判断,确认压力是否变化,如果不变,说明回退的距离足够;如果变化,再回退一个间隔,直到压力回到0;
17.步骤s5)将当前位置作为第二针起始点,快速前行到最大压力控制点;
18.步骤s6)降速,恒定压力前向推注,完成前向后续过程
19.步骤s7)第二针到达前行结束点,保持不动,释放针管内压力;
20.步骤s8)保持前行结束点,与上一次采样比较,如果与上一次采样偏差小,确定为回退点,回退速度延续步骤s4的速度;
21.步骤s9)快速回退固定时间,回退过程的压力降落,如果快速跌过基础压力,则进入回退完成判断;
22.步骤s10)快速回退固定时间,经过设定的目标基准点;
23.步骤s11)快速回退时间结束,第二针回退点结束判断,同步骤s4,确认压力的变化,如果不变,说明回退的距离足够;如果变化,再回退一个间隔,直到压力回到0。
24.进一步地,在所述步骤s11后,计算第二针最终行程点与步骤s10中目标基准点的偏差,如果第二针最终行程点在目标基准点前,在第三针目标位置的基础上增加上述偏差;如果在目标基准点后,在第三针目标位置的基础上减少上述偏差。
25.本发明的整机、注射器手柄和注射器配合使用,在手柄推头上增加了推力检测器,手柄主控连带主控、电机驱动器和电流检测器移到手柄一侧,结合推力检测器实现精密的实时控制,并采用相关的特别注射算法,减少漏液,实际注射偏差在精度目标的3%以内;将相关的处方药液都完全充分均匀注入,避免各针的不均匀和浪费;操作者可使用最少的时间完美实施完相关注射,让相关的注射和处方设置完全一致,降低患者的疼痛。
附图说明
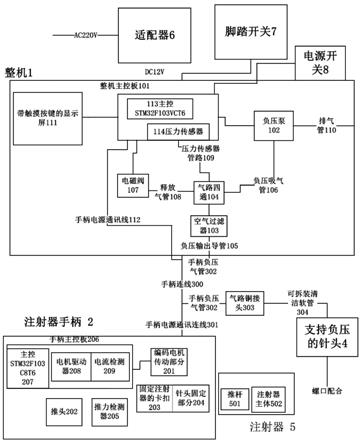
26.图1为本发明的系统框图;
27.图2为本发明的注射推头压力控制曲线示意图;
28.图3为本发明实施例1的时序控制图;
29.图4为本发明实施例2的时序控制图。
30.附图标记:
31.1整机
32.101整机主控板、102负压泵、103空气过滤器、104气路四通、
33.105负压输出导管、106负压吸气管、107电磁阀、108释放气管、
34.109压力传感器管路、110排气管、111显示屏、112手柄电源通讯线、
35.113主控制器、114压力传感器、
36.2注射器手柄、
37.201编码电机、202推头、203卡扣、204针头固定件、205推力检测器、
38.206手柄主控板、207主控、208电机驱动器、209电流检测器、
39.300手柄连线、301通讯连线、302手柄负压气管、303气路铜接头、
40.304清洁软管、
41.4针头、5注射器、
42.501推杆、502注射器主体、6适配器、7脚踏开关、8电源开关。
具体实施方式
43.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
44.本发明公开了一种电子微量注射的智能控制系统,如图1所示,包括整机1、注射器手柄2和注射器5,所述整机1由电源开关8控制开闭,所述整机1与适配器6连接,所述适配器6将交流220v转换成直流12v为整机1供电,所述整机1包括整机主控板101,整机主控板101内置主控制器113(stm32f103vct6),所述整机主控板101的各引脚分别接至显示屏111、电磁阀107、负压泵102和电源开关8;主控板101的压力传感器114通过压力传感器管路109连接气路四通104,所述气路四通104通过空气过滤器103接至针头4,主控板101通过手柄电源通讯线112连接手柄连线300中的手柄电源通讯连线301连接注射器手柄2;所述注射器手柄2包括推头202、卡扣203、针头固定件204、推力检测器205和手柄主控板206,所述手柄主控板206的各引脚分别接至编码电机201和推力检测器205,所述手柄主控板206设有主控207(stm32f103c8t6)、电机驱动器208和电流检测器209。
45.所述整机主控板101通过压力传感器管路109接至气路四通104的第一端,所述电磁阀107通过电磁释放气管108接至气路四通104的第二端,所述负压泵102通过负压吸气管106接至气路四通104的第三端,所述负压泵102接有排气管110,所述气路四通104的第四端与空气过滤器103的一端连接。
46.所述空气过滤器103的另一端通过负压输出导管105与手柄连线300中的手柄负压气管302一端连接,所述整机主控板101通过手柄电源通讯线112接至手柄连线300中的手柄电源通讯连线301一端,所述手柄连线300包括手柄电源通讯线301和手柄负压管302两根管路,所述手柄连线300的通讯连线301的另一端接至注射器手柄2,所述手柄连线300中的手柄负压气管302的另一端与气路铜接头303的一端连接,所述气路铜接头303的另一端与可拆装清洁软管304的一端连接,所述可拆装清洁软管304的另一端与针头4连接。
47.本发明的智能控制系统,通过整机1实现显示功能,以及负压建立与释放,注射器手柄2实现核心的控制注射过程,在手柄推头202上增加了推力检测器205,手柄主控板206连带主控207(stm32f103c8t6)、电机驱动器208和电流检测器209移到手柄一侧,结合推力检测器205,实现精密的实时控制,推力检测器205除了加在注射器推头202上,还可加在相关传动机构任何相关的部位。
48.所述注射器5包括注射器主体502和推杆501,所述注射器5配合电子微量快速注射的需求,使用改良的两件式的注射器,去除普通注射器的弹性体。
49.一种电子微量注射的注射方法,包括以下步骤:
50.操作者将针头4插入患者皮肤;
51.整机主控控制负压泵102建立负压;
52.负压建立后,通过手柄通讯连线301通知注射器手柄2可以注射,注射过程控制曲
线参见附图2;
53.电机速度控制从最快速度v1,完成达到目标控制压力值303的行程,然后再转到慢速v2以恒定相关的最大压力实现前行的剩余行程,整个前行行程长度为s2;
54.注射到位,注射压力到了附图2上a值,是最大压力,在保持的过程中,有一个压力降落的过程,从a到b,b到c的过程;c到d的压力变化较b到c降低很多,此时的d成为静压控制点,在d点实施电机后退释压的过程。
55.电机全速退出,回退固定时间,测试推头202压力;
56.压力传感器114确认压力值到e,若高于基础压力值就继续后退,等于或低于基础压力f压力点时,系统停止,s3是通过压力确认的回退值;
57.注射基本循环过程结束,系统发出提示音,提醒操作者拔出针头4,准备注射下一个地方,进入下一个循环。
58.本发明的电子微量注射的注射方法具体包括以下步骤:
59.步骤s1)使用针管推杆501排气后的起始点,基准气压点,以此为基准,第一针前行到达最大压力控制点;
60.步骤s2)第一针继续前行,到达前行结束点,保持不动,释放针管内压力;
61.步骤s3)保持前行结束点,和上一次采样比较,如果与上一次采样偏差小,确定此前行结束点为回退点;
62.步骤s4)快速回退固定时间,回退到基准气压点,做回退完成判断,确认压力是否变化,如果不变,说明回退的距离足够;如果变化,再回退一个间隔,直到压力回到0;
63.步骤s5)将当前位置作为第二针起始点,快速前行到最大压力控制点;
64.步骤s6)降速,恒定压力前向推注,完成前向后续过程
65.步骤s7)第二针到达前行结束点,保持不动,释放针管内压力;
66.步骤s8)保持前行结束点,与上一次采样比较,如果与上一次采样偏差小,确定为回退点,回退速度延续步骤s4的速度;
67.步骤s9)快速回退固定时间,回退过程的压力降落,如果快速跌过基础压力,则进入回退完成判断;
68.步骤s10)快速回退固定时间,经过设定的目标基准点;
69.步骤s11)快速回退时间结束,第二针回退点结束判断,同步骤s4,确认压力的变化,如果不变,说明回退的距离足够;如果变化,再回退一个间隔,直到压力回到0。
70.在所述步骤s11后,计算第二针最终行程点与步骤s10中目标基准点的偏差,如果第二针最终行程点在目标基准点前,在第三针目标位置的基础上增加上述偏差;如果在目标基准点后,在第三针目标位置的基础上减少上述偏差。
71.实施例1:
72.相关注射过程控制使用到医美领域的水光针,微量多针,有变化压力负载,需要实现快速推注,同时有高精度的应用环境,参见图3。
73.整个过程,推头202、压力传感器114和针头4、推杆501是紧密结合的,具体过程见下时序说明表。
74.通过实时压力实施精准的控制,把面部皮肤内压导致的注射偏差在下次注射时实现弥补,实现高效的保持和回退过程控制。
75.[0076][0077]
实施例2;
[0078]
水光注射领域的应用实施例,实际控制算法采用超前弥补的方式,过程中调整,参见图4。
[0079]
具体过程参见下时序说明表;
[0080]
控制的核心是通过实时压力实施精准的控制,通过预设面部皮肤内压导致的注射偏差参考值,在下次注射时再实现调整,实现高效的保持和回退过程控制。
[0081]
超前补偿,注射推注过程智能控制过程(少痛均匀少漏液整个注射过程效率最佳)。
[0082]
[0083][0084]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。