1.本发明涉及一种移动车,更具体地说,它涉及一种医院智能电动助力多功能移动车。
背景技术:
2.在临床医疗上中,很多手术后病人行动不便,通常在后续住院观察以及定时检测中需要通过护工推动医用移动车将病人从病房与检测区之间进行转移,以及到达目的地后需要帮助病人起身,即便现在对楼道进行了大量的改良,然而依旧会存在护工人员需求量大、耗费护工体力等问题。
技术实现要素:
3.针对现有技术存在的不足,本发明的目的在于提供一种医院智能电动助力多功能移动车,该多功能移动车能够辅助将病人从病房转移至检测区,降低护工人员的工作强度,并且能够有效辅助病人起身。
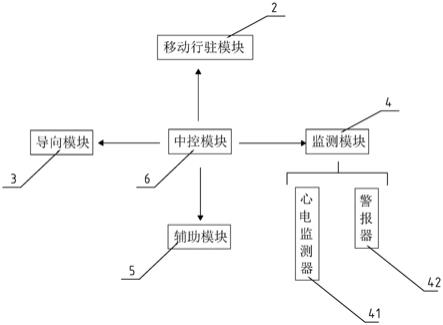
4.为实现上述目的,本发明提供了如下技术方案:一种医院智能电动助力多功能移动车,包括有移动车本体和设置于移动车本体上的移动行驻模块、导向模块、监测模块、辅助模块以及中控模块,所述移动行驻模块、导向模块、监测模块、辅助模块分别与中控模块电连接;
5.所述中控模块用于输入并确定起始位置和目标位置;
6.所述导向模块用于接收起始位置和目标位置,并且根据医院路线生成导向路线;
7.所述移动行驻模块用于根据导向路线带动移动车本体进行移动;
8.所述监测模块用于监测移动过程中患者的身体状况和监测道路状况信息;
9.所述辅助模块用于当移动车移动至目标位置后,辅助患者起身。
10.综上所述,本发明具有以下有益效果:通过向中控模块内输入医院的路线图纸,生成多条由各个病房通往各个检测区域的路线信息,并且在每一个移动车本体上安装gps定位装置,从而能够了解每一个移动车的初始位置,以及了解每一个移动车的行进路线,当同一条行进路线出现多辆移动车时,中控模块能够适当调节出行时间、或者更改调整出行路线。
11.监测模块包括有心电监测器和警报器,用于监测移动过程中患者的体征状况,避免发生意外情况,当出现其他情况时,能够通过警报器进行及时报警。
12.另外该辅助模块的设计,当到达指定位置后,该辅助模块能够帮助病人达到方便起身的效果。从而大大减少了对医护人员的需求,不仅降低了人力需求而且大大解放了劳动力。
附图说明
13.图1为医院智能多功能移动车的原理示意图;
14.图2为多功能移动车的立体结构示意图;
15.图3为多功能移动车启动辅助模块后的结构示意图;
16.图4为移动组件的结构示意图;
17.图5为横向移动件与横向联动件的结构示意图;
18.图6为多功能移动车上升后的结构示意图。
19.附图标记:1、移动车本体;11、上身板;12、臀板;13、下身板;14、第一板;15、第二板;16、覆盖板;2、移动行驻模块;3、导向模块;4、监测模块;41、心电监测器;42、警报器;5、辅助模块;51、第一控制部件;511、转动轴;512、驱动电机;53、移动组件;531、联动齿轮;532、主动齿轮;533、辅助齿轮;534、联动链条;535、联动轴;6、中控模块;7、横向移动件;71、横向主齿轮;72、横向副齿轮;73、横向传送带;8、横向联动件;81、移动齿轮;82、联动蜗杆;9、枕件。
具体实施方式
20.下面结合附图和实施例,对本发明进一步详细说明。其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“底面”和“顶面”、“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
21.参照图1至图6所示,为实现上述目的,本发明提供了如下技术方案:一种医院智能电动助力多功能移动车,包括有移动车本体1和设置于移动车本体1上的移动行驻模块2、导向模块3、监测模块4、辅助模块5以及中控模块6,移动行驻模块2、导向模块3、监测模块4、辅助模块5分别与中控模块6电连接;
22.中控模块6用于输入并确定起始位置和目标位置;
23.导向模块3用于接收起始位置和目标位置,并且根据医院路线生成导向路线;
24.移动行驻模块2用于根据导向路线带动移动车本体1进行移动;
25.监测模块4用于监测移动过程中患者的身体状况和监测道路状况信息;
26.辅助模块5用于当移动车移动至目标位置后,辅助患者起身。
27.本发明的设计,通过向中控模块6内输入医院的路线图纸,生成多条由各个病房通往各个检测区域的路线信息,并且在每一个移动车本体1上安装gps定位装置,从而能够了解每一个移动车的初始位置,以及了解每一个移动车的行进路线,当同一条行进路线出现多辆移动车时,中控模块6能够适当调节出行时间、或者更改调整出行路线。
28.该移动行驻模块2为常用的移动机器人上的移动系统,大致为万向轮、驱动装置,电源装置以及锁轮驻车装置,该结构为现有技术,在此不加以赘述。
29.监测模块4包括有心电监测器41和警报器42,用于监测移动过程中患者的体征状况,避免发生意外情况,当出现其他情况时,能够通过警报器42进行及时报警。
30.另外每一个监测模块4都外接有数据传输平台,数据传输平台根据病房信息进行分类分区,并且每个病房内均设置有监测显示器,通过数据传输平台,将分类好的监控数据传输至每个病房中供医护人员进行对应监测。
31.另外该辅助模块5的设计,当到达指定位置后,该辅助模块5能够帮助病人达到方便起身的效果。从而大大减少了对医护人员的需求,不仅降低了人力需求而且大大解放了
劳动力。
32.移动车本体1包括有设置于移动车本体1上的上身板11、臀板12、下身板13,辅助模块5包括有用于控制上身板11翻转的第一控制部件51以及用于控制下身板13翻转的第二控制部件,第一控制部件51和第二控制部件分别与中控模块6电连接。
33.该第一控制部件51和第二控制部件可以采用现有的翻转结构,例如通过上身板11与臀板12铰接、下身板13与臀板12铰接并且配合电机或者气缸进行驱动。
34.导向模块3生成的导向路线包括有上斜坡路段、下斜坡路段以及平坡路段,中控模块6用于接收并记录上斜坡路段数据、下斜坡路段数据以及平坡路段数据;
35.当移动车本体1途径上斜坡路段时中控模块6控制第一控制部件51使得上身板11向上翻转;
36.当移动车本体1途径下斜坡路段时中控模块6控制第二控制部件使得下身板13向下翻转。
37.当病房与检测区位于临近楼层时,在楼层与楼层之间设计有斜坡通道,从而方便移动车无需挤电梯即可通行,该导向模块3配合中控模块6的设计,当移动车途径上坡路段时,上身板11向上翻转,从而在移动过程中病人的重心抵靠于上身板11上,降低病人的不适。
38.当移动车途径下坡路段时,下身板13向下翻转,从而使得移动过程中病人的重心下移,双脚抵靠于下身板13上,不仅能够保证病人身体位置稳妥,而且能够避免病人出现不适。进一步的该下身板13由与臀板12铰接的小腿板和与小腿板铰接的脚踏板组成,而第二控制部件包括有分别控制小腿板翻转的小腿翻转件和控制脚踏板翻转的脚踏翻转件,实现小腿板转动时能够调节脚踏板位置,使得病人脚有所踩,增加下坡时的着地感。
39.另外,为了增加对路线监测的准确性,在移动车本体1上设置有三轴陀螺仪或者水平传感器,从而准确的判断所处路段为上坡段还是下坡段。
40.上身板11包括有与臀板12铰接的第一板14和与第一板14活动连接的第二板15。
41.实施例一:辅助模块5还包括有用于驱动第二板15移动的移动组件53,第二板15上设置有与移动组件53联动设置的枕件9,当上身板11向上翻转时移动组件53带动枕件9与病人腰部抵接。该枕件9的设计,通过一个枕件9可以实现当床模式时,能够作为头枕供患者头部枕靠,当轮椅模式时能够作为腰枕供患者腰部枕靠,即不需要用户来回调整枕件9,实现枕件9的自动调节的同时能够减少枕件9的数量,当躺下时没有腰枕,当坐立时没有头枕,实现人性化操作。
42.第一控制部件51包括有设置于臀板12上的转动轴511和用于驱动转动轴511转动的驱动电机512,第二板15与第一板14铰接设置,移动组件53包括有设置于第二板15上的联动轴535、设置于联动轴535上的联动齿轮531、设置于转动轴511上的主动齿轮532、与联动齿轮531啮合设置的辅助齿轮533以及联动链条534,主动齿轮532通过联动链条534与辅助齿轮533联动设置,第一板14的翻转方向与第二板15的翻转方向相反;
43.主动齿轮532的径长尺寸大于联动齿轮531的径长尺寸。
44.当驱动电机512启动时,转动轴511带动第一板14翻转时(该翻转结构为现有技术,在此不加以赘述,除了该结构外还可以采用笔记本电脑翻转结构)通过主动齿轮532和联动链条534使得辅助齿轮533转动,再通过辅助齿轮533使得联动齿轮531转动,再通过联动齿
轮531使得联动轴535发生转动(联动轴535与第二板15的结构等同于第一板14与转动轴511结构,在此不加以赘述),从而实现第一板14和第二板15的联动转动,该结构如图4所示,能够实现第二板15与第一板14的翻转方向相反。
45.第二板15上贯穿设置有供枕件9安装的安装槽,安装槽内设置有限位块,枕件9上设置有限位结构,枕件9能够从安装槽的两端伸出。该枕件9从安装槽的两端伸出,使得枕件9的一端能够作为头枕、另一端作为腰枕,实现两用。
46.第一板14上设置有供枕件9伸出的伸出槽和用于覆盖伸出槽的覆盖板16,覆盖板16与第一翻转部件联动设置,第一板14内设置有用于带动覆盖板16沿第一板14宽度方向移动的横向移动件7和用于将横向移动件7与转动轴511联动的横向联动件8。
47.横向联动件8包括有设置于转动轴511上的移动齿轮81和与移动齿轮81啮合设置的联动蜗杆82,横向移动件7包括有横向主齿轮71和横向副齿轮72以及横向传送带73,覆盖板16设置于横向传送带73上,横向主齿轮71与移动齿轮81垂直设置,联动蜗杆82与横向主齿轮71的中心固定连接设置。
48.横向传送带73与覆盖板16之间设置有导向块,导向块上设置有导向槽,导向槽沿第一板14厚度方向延伸设置,第一板14内设置有引导块,覆盖板16上设置有引导斜面,当横向传送带73带动覆盖板16覆盖伸出槽时,覆盖板16通过引导斜面沿导向槽滑移。
49.该覆盖板16的设计能够在卧躺时保证床板相对平整不会镂空,避免造成不适体现,另外当轮椅模式时,枕件9能够从伸出槽内伸出,实现腰枕功能,另外除了该覆盖板16结构的设计外,还可以有软性材质所替代,当枕件9作用于软性材质上时,该软性材质能够对应凸出,从而抵住用户腰部。
50.当驱动电机512驱动转动轴511转动时,转动轴511带上移动齿轮81转动,通过移动齿轮81带动联动蜗杆82转动,从而实现横向主齿轮71和横向副齿轮72以及横向传送带73的运转,从而实现覆盖板16的横向移动。
51.另外再通过导向块、导向槽以及引导块的设计,使得当覆盖板16再封堵伸出槽时,向上移动,从而避免第一板14过于凹凸不平。
52.除了上述提及外为了能够使得第一板14和第二板15能够与导向模块3功能一并使用,另设有第三板,第三板与臀板12铰接,第一板14与第三板铰接,当需要上身板11整体移动时,通过第一控制部件51驱动第三板进行移动,当需要第一板14和第二板15移动时,通过第一控制部件51和移动部件驱动第一板14和第二板15进行移动。
53.实施例二:辅助模块5还包括有用于驱动第二板15移动的移动组件53以及可拆卸安装于移动车上的担架,所述第二板15的转动方向与第一板14的转动方向相反;
54.第一板14、第二板15、臀板12以及下身板13上均设置有供担架杆嵌入的嵌槽,所述第一板14和第二板15的嵌槽贯穿设置,并且第一板14和第二板15的嵌槽内均移动设置有封堵组件。
55.移动组件53包括有封堵块和驱动封堵块移动的移动气缸,所述移动气缸与第一控制部件51联动设置。上述该设计能够满足移动车能够翻转变化的同时,还能够满足担架安装的需求,担架包括有两担架杆和位于两担架杆之间的弹性网,并且两担架杆呈方杆结构设置。
56.当需要动用担架时,移动组件53(可以采用与第一控制部件51和第二控制部结构
相近似的转轴驱动结构)驱动第二板15翻转,第二控制部件驱动下身板13翻转,将担架杆的两端裸露出来,此时在检测区的护工即可通过搬运担架即可将患者转移至检测床上,达到转移方便的效果。
57.当第一板14向上翻转时,移动气缸驱动封堵块移开,此时,第一板14即可穿过担架杆向上翻转。
58.再则为了避免上身板11翻转时会破坏弹性网的弹性,担架杆上均设置有供弹性网滑移的滑移槽和设置于滑移槽内的弹性恢复件,在上身板11移动过程中,弹性网向下移动,当上身板11复位时,弹性网在弹性恢复件的作用下复位,该弹性恢复件为拉簧。
59.另外该第一板14上还设置有引导组件,引导组件包括有滑移杆和与第一控制部件51联动设置的推动件,当第一控制部件51驱动第一板14转动时,滑移杆推动弹性网移动。该第一控制部件51为转动轴511和用于驱动转动轴511转动的驱动电机512例,推动件包括有设置于转动轴511上的齿轮一和设置于另一侧的齿轮二,以及联动齿轮531一和齿轮二的推动链条或推动皮带,该滑移杆设置于推动链条上,当第一控制部件51启动时,滑移杆进行移动从而推动弹性网进行移动收纳,当滑移杆进行复位时,弹性网在弹性恢复件作用下复位。该辅助模块5除了上述提及结构外,还可以为升降装置配合上辅助转移装置,该升降装置可以为气缸结构也可以为丝杆结构,用于驱动移动车的床板上下升降,当移动车到达检测床时,该升降装置驱动床板上升,使得床板与检测床高度持平或者略高于检测床高度。再通过辅助转移装置将患者从移动车转移至检测床上。
60.而该辅助转移装置具体可以采用如下结构:1、床板上设置有供担架安装的安装槽,安装槽内设置有电控限位结构(类似锁扣装置),当升降装置将床板上升至指定位置时,该电控限位结构解除对担架的限制作用,随后医护人员通过担架即可将患者从移动床转移至检测床上,达到方便转移的效果。
61.辅助模块还包括有用于一并驱动上身板、臀板以及下身板上下移动的升降气缸。
62.2、床板上下分为上板与下板(按照下述递送方式一,可以一并驱动上身板、臀板以及下身板上下移动),并且该转移车上设置有用于驱动上板移动的转移结构,该转移结构可以雷同于升降装置设计,只是上板移动方向与床板移动方向不同,该上板沿床板的宽度或者长度方向移动,当移动床移动至检测床一侧时,通过该转移结构将患者向检测床方向递送,递送方式具有多种:一、使得患者接近检测床后,通过患者自行小范围挪移至检测床上。二、检测床上设置有供上板插入的插槽空间,当上板插入至该插槽空间内时,患者随着检测床上的斜面移动至检测床上方。
63.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。