1.本实用新型涉及一种放射外科机器人装置,特别涉及一种全球面放射治疗装置。
背景技术:
2.图像引导放射治疗(image gu ided rad iat ion therapy,i grt)是近十几年来逐步发展起来的肿瘤放射治疗新技术,它通过先进的图像设备及图像处理方法,在治疗计划阶段,对患者进行准确靶区探测、勾画和治疗射束分布规划、剂量分布计算,在治疗照射前进行精确靶区定位、在治疗过程中进行靶区运动跟踪,实现对肿瘤的精确放射治疗,降低对肿瘤周边正常组织及关键器官的损伤。
3.放射外科机器人系统是放射外科治疗专用设备,主要用于全身实体肿瘤精确放射治疗。美国accuray公司研发的cyberkn ife放射外科机器人系统,结合图像引导、现代机器人和小型化直线加速器等先进技术,实现了精确图像引导下的精准放疗,可低分次(1至5次)治疗不同大小的肿瘤,已在世界上得到了较广泛临床应用。
4.基于多自由度机器人的放射外科机器人系统,需要理想的全球面治疗空间,使加速器治疗射束可以在球面上不同位置不同方向投射到患者靶区,以到达最优化的治疗剂量分布,获得最好的治疗效果。放射外科系统的治疗中心,是整个系统的基准点。以此治疗中心为球中心定义球面,球面上规划均匀分布的多个节点(可以多达数千个),称为全球面治疗节点,球面上所有治疗节点的集合即为全球面治疗空间。治疗计划系统,从全球面治疗空间中选择针对具体患者的优化治疗节点(数十至上百个),满足最佳剂量分布的临床要求。
5.基于多自由度机器人的放射外科机器人系统的一个主要缺陷是治疗空间有限性,如图1所示,放射外科系统的治疗空间是大半个球面,而非理想的全球面。采用在低位置的治疗中心,称为低等治疗中心,在低等治疗中心进行治疗,机器人携带加速器,在确保和治疗床以及患者不发生碰撞情况下,能到达病人上方和两侧的大部分空间位置,形成大半个球面的低等治疗中心治疗空间。而治疗通常在患者仰卧躺姿情况下进行,对靠近背部的靶区,如脊柱靶区和靠近背部的胸腹部靶区,有限治疗空间限制了治疗射束从患者底部位置和底部周边位置的照射,使治疗计划得不到满足临床要求的最优化治疗剂量分布。在实际临床应用中,对靠近背部的靶区,可改成俯卧躺姿治疗,达到治疗剂量分布的要求。但由于呼吸引起的靠近背部靶区运动,会降低治疗精度,延长治疗时间,同时给治疗过程带来更多的临床操作复杂性。
6.cn201310115139.6公开了一种机器人无创放射治疗系统,其技术特点是安装图像引导设备的大尺寸机械g型臂及g型臂导轨,由于g型臂大尺寸复杂机械结构,x射线源滑动精度难以控制,滑动到位后需要再次校准。无论g型臂安装在地面或悬挂在天花板上,无论等治疗中心在什么位置或设置多个等治疗中心,因为在g型臂占据的很大空间上,必然会对治疗空间有一定遮挡,影响直线加速器可到达的空间位置,直线加速器无法到达全球面治疗空间。
7.cn200610008759.x公开了一种机器人放射治疗系统,其由正、逆向放射治疗计划
系统,三维数控治疗床,实时影像自动跟踪系统,机器人系统,射线源,实时剂量验证系统六大模块组成,其中实时影像自动跟踪系统由c型臂实时影像系统、红外自动跟踪定位仪和电磁自动跟踪定位仪组成,但其c型臂占据的很大空间,影响直线加速器可到达的空间位置,必然产生治疗盲区,导致了有限的球面治疗空间。
8.cn201710688854.7公开了一种立体定向放射外科治疗装置,由辐射装置系统、六维机器人治疗床1和治疗计划系统组成;辐射装置系统由机架12和c形机臂5构成,机架12上设置有转轴10,转轴10与导轨9连接并控制导轨9的转动,c形机臂5安装在导轨9上并沿导轨9进行弧形运动;c形机臂5一端安装有射线源2,射线源2底端安装有小机头3,小机头3底端安装有准直器4;c形机臂5另一端安装有可伸缩电子射野影像装置7和活动屏蔽防护配重块8;靶器官定位探测装置6安装在六维机器人治疗床1床面侧方或下方;辐射治疗头可以绕x轴作90度(或
±
45度)旋转运动。此治疗装置提供多个弧度位置上的治疗射线,形成的治疗空间是球面中间部分。
9.cn201510056060.x公开了一种放射治疗摆位定位装置及静态、动态靶区摆位方法,治疗机器人具有操作手臂,紧凑型直线电子加速器安装于治疗机器人的操作手臂端部,二级准直器安装于紧凑型直线电子加速器的端部;机器人治疗床设置于双影像c臂系统相对应位置处,双影像c臂系统内侧设置有c臂滑轨激光定位器,在双影像c臂系统外部对应位置处设有c臂安装空间左侧定位器,配备两组x光影像系统,可以实现双目成像;当c臂滑轨自转,同时只启用一组x光影像系统时,可以实现cbct成像。与前述专利类似的,上述专利的设计方式也导致具有同样的问题。此治疗装置不能提供在患者下方的治疗空间。
10.cn201911269529.2公开了一种全周球面立体定向放疗装置,包括x波段加速器、多叶准直器、治疗床、影像系统、epi d、固定机架和旋转机架,所述旋转机架可转动的设于所述固定机架,所述治疗床相对于所述固定机架固定,所述影像系统设于所述旋转机架,所述x波段加速器和所述多叶准直器相连,所述x波段加速器设于所述旋转机架,以使所述x波段加速器对治疗中心形成球面照射;所述epi d设于所述旋转机架,并且所述epi d和所述x波段加速器的射束正交,以接收剩余射束。此治疗装置提供多个弧度位置上的治疗射线,形成的治疗空间是球面中间部分。
11.us20040184579公开了一种辐射治疗设备包括引导件和支撑构件,所述引导件沿具有预定半径的轨道移动辐射产生单元,使得从辐射产生单元发射的x射线可以穿过等中心,支撑件使导向件绕穿过等心点的转动轴线转动,放射线发生单元通过导向件和支撑件沿球面移动,并在多个方向上向等中心施加x射线。此治疗装置提形成的治疗空间是球面中间部分。
12.us2007071176公开了一种用于图像引导辐射治疗输送系统的质量保证的方法和设备。在放射治疗输送系统的成像引导系统的引导下,将质量保证(“qa”)标记定位在预设位置。在qa标记处从辐射治疗输送系统的辐射源发射辐射束,产生由于辐射束引起的qa标记的曝光图像,然后分析曝光图像以确定辐射治疗递送系统是否对准。但上述专利其加速器的移动位置有限,不能位于患者下方位置,对治疗方案的设计形成一定限制,使其仅能获得半球形的治疗空间,不利于病患的治疗。
技术实现要素:
13.本实用新型所要解决的技术问题是克服现有放射外科机器人装置治疗空间的有限性,提供一种全球面放射治疗装置,在双图像引导下通过低等治疗中心和高等治疗中心分别构成的两个治疗空间,实现在全球面治疗空间上的放射外科治疗。
14.为实现上述目的,本实用新型提供如下技术方案:
15.一种全球面放射治疗装置,包括多自由度机器人、直线加速器、双图像引导定位机构、多自由度治疗床、呼吸运动跟踪机构,所述双图像引导定位机构包括四个射线源、两个射线探测器,所述射线源一和射线源二发出的两个射束相交处为低等治疗中心,所述射线源三和射线源四发出的两个射束相交处为高等治疗中心,以所述低等治疗中心和所述高等治疗中心分别为球心的若干个治疗节点构成全球面治疗空间。
16.进一步的,以所述低等治疗中心为球心的若干个治疗节点构成患者上方及两侧的球形治疗空间,以所述高等治疗中心为球心的若干个治疗节点构成患者下方及两侧的球形治疗空间。
17.进一步的,所述射线源为x射线管,所述射线探测器为平板探测器。
18.进一步的,所述低等治疗中心和所述高等治疗中心满足如下条件:
19.3575≤d
11
+d
12
≤3700
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
20.0.54≤h1/d
11
≤0.58
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
21.3515≤d
21
+d
22
≤3600
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
22.0.68≤h2/d
21
≤0.72
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
23.0.42≤(h
2-h1)/h1≤0.56
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
24.式中:d
11
为低等治疗中心到平板探测器成像中心距离;d
12
为低等治疗中心到低等中心点x射线管球管源中心距离;d
21
为高等治疗中心到平板探测器成像中心距离;a
22
为高等治疗中心到高等中心点x射线管球管源中心距离;h1为低等治疗中心离地面高度;h2为高等治疗中心离地面高度。
25.进一步的,所述低等治疗中心图像引导定位系统的x射线管的高度为2000-2200mm,所述高等治疗中心图像引导定位系统的x射线管的高度为2500-2700mm,所述低等治疗中心图像引导定位系统和高等治疗中心图像引导定位系统的成像交角范围为30
°‑
120
°
。
26.进一步的,所述x射线管一和二发出的射束垂直于平板探测器的实际投影面,得到正投影的x射线图像;所述x射线管三和四发出的射束不垂直于平板探测器的实际投影面,得到斜投影的x射线图像。
27.进一步的,还包括图像转换机构,将所述斜投影的x射线图像转化为虚拟投影面的正投影x射线图像。
28.进一步的,所述治疗床根据治疗计划变换位移,调整患者的位置,使之处于所述全球面治疗空间范围内。
29.进一步的,所述呼吸运动跟踪机构利用红外光学运动跟踪技术,实现对体内靶区实时运动跟踪。
30.本实用新型与现有技术相比所具有的有益效果:
31.1、高等治疗中心治疗空间,对靠近背部的靶区,如脊柱靶区和靠近背部的胸腹部
靶区,使患者可以在正常仰卧躺姿情况下进行有效治疗。
32.2、低等治疗中心和高等治疗中心相结合的全球面治疗空间,使各部位靶区得到更多治疗射束投照,得到更优化更有效的治疗剂量分布,取得更好的治疗效果。
33.3、低等治疗中心和高等治疗中心的切换快捷,仅需切换x射线管即可;两组x射线管共用一组平板探测器,简化了治疗装置。
34.4、x射线管和平板探测器的位置固定,治疗过程中仅需调整治疗床到达低等治疗中心或高等治疗中心,无需对图像引导定位系统进行重新校准。
附图说明
35.图1是现有放射外科机器人装置示意图。
36.图2是采用低等治疗中心治疗空间的治疗示意图。
37.图3是采用高等治疗中心治疗空间的治疗示意图。
38.图4是低等治疗中心治疗空间和高等治疗中心治疗空间的组合示意图。
39.图5(a)和5(b)是全球面放射治疗装置的成像几何示意图。
40.图6是高等治疗中心图像引导定位机构的实际投影面与虚拟投影面的转换示意图。
41.图7是全球面放射治疗装置的治疗流程图。
42.图8(a)-8(c)是采用高、低等治疗中心组合治疗模式的治疗实例。
43.图9(a)-9(b)是采用低等治疗中心治疗模式的治疗实例。
44.图10(a)-10(b)是采用高等治疗中心治疗模式的治疗实例。
具体实施方式
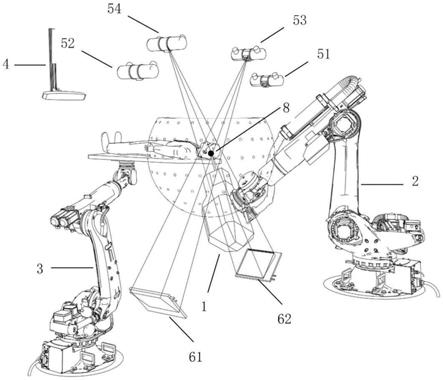
45.一种全球面放射治疗装置,其结构组成如图2和图3所示:小型化直线加速器1,安装携带加速器的六自由度机器人2,六自由度机器人治疗床3,呼吸运动跟踪机构4,对应于低等治疗中心7的图像引导定位机构,对应于高等治疗中心8的图像引导定位机构。其中,呼吸运动跟踪机构4,利用红外光学运动跟踪技术,实时探测体表运动,结合图像引导定位机构,实现对体内靶区实时运动跟踪。双图像引导定位机构的成像硬件组成:4个x射线管,对应的4个高压发生器(通常放置在设备间),2个x射线平板探测器。低等治疗中心图像引导定位机构以低等治疗中心7为成像中心,其成像硬件组成,如图2所示,x射线管一51和平板探测器一61产生一个投影面上的x射线图像,x射线管二52和平板探测器二62产生另一个投影面上的x射线图像。高等治疗中心图像引导定位机构以高等治疗中心8为成像中心,其成像硬件组成,如图3所示,x射线管三53和平板探测器一61产生一个投影面上的x射线图像,x射线管四54和平板探测器二62产生另一个投影面上的x射线图像。如图4所示,低等治疗中心7形成病人上方及两侧的低等中心治疗空间,高等治疗中心8形成病人下方及两侧的高等中心治疗空间。低等治疗中心治疗空间和高等治疗中心治疗空间的组合,提供了全球面治疗空间。
46.全球面放射治疗装置的图像引导定位机构成像几何,如图5(a)所示,发射源一和发射源二,分别发射射线束,交叉获得低等治疗中心,在两个平板探测器生成实际投影一和实际投影二;发射源三和发射源四,分别发射射线束,交叉获得高等治疗中心,在两个平板
探测器生成两个实际投影,然后分别转化为虚拟投影一和虚拟投影二。
47.放射治疗系统的各部件的安装位置及相互之间的适配关系,是本发明技术方案的关键参数和设计重点,因为受限于天花板离地面高度以及保证图像质量的要求,低等治疗中心和高等治疗中心的高度及相对高度,需要进行设计,x射线管的球管源中心到平板成像中心的距离也对成像质量有关键性的影响,同时需要考虑到源轴距sad、治疗床行程、加速器放射源中心等部件的影响,在确保硬件之间无碰撞、硬件与地面无碰撞、硬件与治疗安全区无碰撞的情况下,携带加速器机头的六自由度机械臂应能到达病人上方、下方和两侧的尽可能大空间位置。因此需要统筹考虑上述安装条件进行统筹设计并验证。
48.基于以上考虑,本发明通过对各部件之间的位置关系进行理论计算并根据结果进行了设计,对设计方案通过仿真模拟和实际验证,以满足治疗过程中各种实际操作的便利性及各类条件下的成像质量的平衡性需求,参照图5(b)所示的结构与各参数,采用了如下的限定关系:
49.3575≤d
11
+d
12
≤3700
ꢀꢀꢀ
(1)
50.0.54≤h1/d
11
≤0.58
ꢀꢀꢀꢀ
(2)
51.3515≤d
21
+d
22
≤3600
ꢀꢀꢀꢀ
(3)
52.0.68≤h2/d
21
≤0.72
ꢀꢀꢀꢀꢀꢀ
(4)
53.0.42≤(h
2-h1)/h1≤0.56
ꢀꢀꢀꢀ
(5)
54.式中:d
11
为低等治疗中心到平板探测器成像中心距离;d
12
为低等治疗中心到低等中心点x射线管球管源中心距离;d
21
为高等治疗中心到平板探测器成像中心距离;d
22
为高等治疗中心到高等中心点x射线管球管源中心距离;h1为低等治疗中心离地面高度;h2为高等治疗中心离地面高度。
55.此外,本发明的技术方案中,除了需同时满足上述公式(1)-(5)的安装条件外,还需要满足如下条件,低等治疗中心图像引导系统的x射线管与地面距离h1的范围:2000-2200mm,高等治疗中心图像引导系统的x射线管与地面距离h2的范围:2500-2700mm;低等治疗中心射束中心与垂直面夹角α1和高等治疗中心射束中心与垂直面夹角α2交角范围均为:15
°‑
60
°
,且α1>α2;尤其是,在本发明中,平板探测器的位置可调整,位于地面上或者地面下,为了保证高等治疗中心离地面高度以及治疗床的行程范围,以放于地面下10-50mm为宜。
56.特别地,为了简化图像引导定位系统的多次调准,设置四个射线源及两个平板探测器的位置固定,即低等治疗中心和高等治疗中心的位置固定。在治疗过程中,仅需根据治疗需求对治疗床进行升降,到达低等治疗中心或高等治疗中心。
57.低等治疗中心图像引导定位机构和高等治疗中心图像引导定位机构,共同使用两个投影方向上的平板探测器。低等治疗中心图像引导定位机构的x射线发射源发出的射束垂直于平板探测器的实际投影面,生成正投影的x射线图像,用于图像引导定位的x射线图像和ct图像的二维-三维图像配准方法,采用“一种基于双平板的二维-三维医学图像配准方法及系统”专利号zl201110125385.0。
58.高等治疗中心图像引导定位机构的发射源发出的射束不垂直于平板探测器的实际投影面,生成斜投影的x射线图像。为了x射线图像和三维ct图像能进行图像配准计算患者位置偏差,在正投影方向设置一个垂直于投影方向的虚拟成像面,对采集的x射线图像进
行从实际成像面到虚拟成像面的转换,从而生成正投影的x射线图像,便于采用上述专利的二维-三维图像配准方法。首先设置一个虚拟投影面,使x射线发射源发出的射束垂直于虚拟投影面,然后将实际斜投影面上的图像转化成虚拟投影面上的正投影图像。如图6所示,x1py1和x2py2分别为实际投影面和虚拟投影面的二维坐标系,两个坐标系平面的夹角为γ,x射线发射源中心点到平板探测器中心点的距离为d。
59.β1=90
°‑
α160.β2=90
°‑
α261.γ=β
2-β1=α
1-α262.假设(x1,y1)是实际斜投影面x1py1坐标系上的一个坐标点,在虚拟正投影面x2py2坐标系上的相对应坐标点(x2,y2)为:
[0063][0064][0065]
全球面放射治疗装置的治疗流程如图7所示,在治疗计划阶段,治疗计划系统输入患者ct或mr i诊断影像,勾画肿瘤靶区及关键器官,在全球面治疗空间选择治疗节点,计算治疗剂量分布和每个治疗节点剂量分配,制定治疗计划;在治疗前,针对低等治疗中心治疗空间和高等治疗中心治疗空间的治疗节点进行治疗路径规划,图像引导机构对在治疗床上的患者进行图像引导摆位验证,探测患者位置偏差,六自由度治疗床自动纠正患者位置偏差;在治疗中,六自由度机器人携带加速器,到达治疗球面上的某个指定治疗节点,进行治疗射束投射,然后按照治疗计划规划的治疗路径,六自由度机器人携带加速器完成低等治疗中心各治疗节点的射束投射,切换至高等治疗中心完成各治疗节点的射束投射,结束治疗。
[0066]
在整个治疗过程中,对头颈、脊柱等不受呼吸引起运动的静态靶区,图像引导定位机构持续探测患者位置偏差,六自由度机器人相应地在每个治疗节点上纠正射束位置补偿患者位置偏差;对由呼吸引起运动的胸腹部靶区,呼吸运动跟踪机构实时跟踪靶区呼吸运动,六自由度机器人带动加速器,连续调整治疗射束,补偿靶区运动,实现运动跟踪治疗。
[0067]
实施例一:
[0068]
采用高、低等治疗中心组合治疗模式的治疗实例,需要同时对患者上方和背部进行放射治疗,假设总共有5个治疗点(真实病例治疗点个数可为几十或更多,此处仅用5个作示意),其中治疗点91、92、93为低等治疗中心模式治疗,治疗点94、95为高等治疗中心模式治疗。治疗点93同时位于低等治疗中心和高等治疗中心的治疗空间,本实施例采用低等治疗中心模式治疗,如图8(a)所示。
[0069]
如图8(b)-8(c)所示,按照治疗计划规划的治疗路径,进行低等治疗中心图像引导定位,其中d
11
为1650mm,d
12
为2003mm,d
21
为2018mm,d
22
为1553mm,h1为920mm,h2为1400mm,α1为45
°
,α2为35.3
°
,h1为2336.33mm,h2为2667.14mm。六自由度机器人携带加速器,依次到达治疗球面上的指定治疗节点91、92、93,进行治疗射束投射,完成低等治疗中心治疗空间的
治疗;切换至高等治疗中心图像引导定位,六自由度机器人携带加速器,依次到达治疗球面上的指定治疗节点94、95,进行治疗射束投射,完成高等治疗中心治疗空间的治疗。
[0070]
实施例二:
[0071]
采用低等治疗中心治疗模式的治疗实例,对患者上方和侧方进行放射治疗,假设总共有5个治疗点(真实病例治疗点个数可为几十或更多,此处仅用5个作示意),其中治疗点101、102、103、104、105均为低等治疗中心模式治疗,如图9(a)所示。
[0072]
如图9(b)所示,按照治疗计划规划的治疗路径,进行低等治疗中心图像引导定位,其中d
11
为1650mm,d
12
为2003mm,h1为920mm,α1为45
°
,h1为2336.33mm。六自由度机器人携带加速器,依次到达治疗球面上的指定治疗节点101、102、103、104、105,进行治疗射束投射,完成低等治疗中心治疗空间的治疗。
[0073]
实施例三:
[0074]
采用高等治疗中心治疗模式的治疗实例,对患者上方和侧方进行放射治疗,假设总共有5个治疗点(真实病例治疗点个数可为几十或更多,此处仅用5个作示意),其中111、112、113、114、115治疗点均为高等治疗中心模式治疗,如图10(a)所示。
[0075]
如图10(b)所示,按照治疗计划规划规划的治疗路径,进行高等治疗中心图像引导定位,其中d
21
为2018mm,d
22
为1553mm,h2为1400mm,α2为35.3
°
,h2为2667.14mm。六自由度机器人携带加速器,依次到达治疗球面上的指定治疗节点111、112、113、114、115,进行治疗射束投射,完成高等治疗中心治疗空间的治疗。
[0076]
以上所述仅为本实用新型的实施方式,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。