1.本实用新型涉及健身和运动器材领域,具体地,涉及外磁控模组结构。
背景技术:
2.目前,磁控健身车是指产生阻力的金属飞轮外围(或内围)有磁阻模块挨近,磁阻模块和飞轮之间的距离决定了该健身车的磁阻大小,通过控制磁阻模块和飞轮之间的距离,从而控制飞轮旋转时的阻力大小,该阻力通过皮带轮传递到脚踏上,训练者通过踩踏脚踏,克服传递过来的阻力,达到锻炼的目的。
3.专利文献cn104474664b提出一种健身车外磁阻力控制机构,它包括滑块、固定板以及多块磁石,所述滑块上设有弧形板以及滑动板,弧形板和滑动板一体成型,所述多块磁石粘接在弧形板上,所述滑动板上设有至少一个滑槽,所述固定板上设有至少一个位置与滑槽相对应的固定孔,它还包括至少一个滑动销,所述滑动销穿过固定孔以及滑槽并与固定板连接,使滑块相对于固定板可滑动。
4.专利文献cn110090400a涉及促进或增强人体的肌肉或关节生长的训练器械领域,具体而言,涉及一种磁控阻力式健身单车,其包括把手、车座、脚蹬、磁控阻力模块以及基座;磁控阻力模块中的主轴承外轮固定在支撑架上,主轴承内轮上连接两个脚蹬,主轴承的内轮的一侧还连接有主动皮带轮,主动皮带轮通过传动皮带与从动皮带轮连接,从动皮带轮固定在从动轴上,从动轴可转动安装在支撑架上;从动轴上还固定铝制飞轮,步进电机固定在支撑架上,步进电机的输出轴连接磁铁支架,磁铁支架位于铝制飞轮的旁侧,磁铁支架上安装磁铁。
技术实现要素:
5.针对现有技术中的缺陷,本实用新型的目的是提供一种外磁控模组结构。
6.根据本实用新型提供的一种外磁控模组结构,包括:磁阻模块、第一磁铁载体、第二磁铁载体、飞轮和张力传感器;
7.所述磁阻模块安装在所述飞轮一侧,所述磁阻模块一端安装所述第一磁铁载体和所述第二磁铁载体;
8.所述第一磁铁载体和所述第二磁铁载体之间安装所述张力传感器;
9.所述飞轮相对所述第二磁铁载体做切割磁力线转动。
10.优选地,所述第二磁铁载体设置为平面板两侧垂直向同一侧延伸出第一垂直板和第二垂直板。
11.优选地,所述第一垂直板朝向所述第二垂直板一侧安装第一磁铁组,所述第二垂直板朝向所述第一垂直板一侧安装第二磁铁组;
12.所述第一磁铁组和所述第二磁铁组之间形成第一磁场。
13.优选地,当所述飞轮转动时,所述飞轮切割所述第一磁场并形成涡流;
14.所述飞轮通过所述涡流形成第二磁场。
15.优选地,所述第一磁场和所述第二磁场之间产生粘滞效应;
16.所述飞轮通过所述粘滞效应产生与转动方向相反的阻力;
17.所述第二磁铁载体通过所述粘滞效应受向所述飞轮方向的牵拉力。
18.优选地,所述张力传感器两端分别设置固定孔和受力孔;
19.所述张力传感器通过所述固定孔固定连接所述第一磁铁载体,所述张力传感器通过所述受力孔固定连接所述第二磁铁载体。
20.优选地,当所述第二磁铁载体受到所述牵拉力,所述张力传感器通过所述牵拉力发生形变。
21.优选地,所述磁阻模块远离所述第一磁铁载体一端连接转轴;
22.所述转轴轴向方向与所述飞轮轴向方向平行;
23.所述磁阻模块通过所述转轴转动。
24.优选地,所述第一磁铁载体背向所述第二磁铁载体一侧安装外联点;
25.所述外联点连接执行机构并通过所述执行机构移动,所述磁阻模块通过所述外联点相对所述转轴转动,所述第二磁铁载体通过所述外联点控制相对所述飞轮距离并控制所述粘滞效应对所述飞轮影响。
26.优选地,所述张力传感器电连接所述mcu控制板。
27.与现有技术相比,本实用新型具有如下的有益效果:
28.1、本装置结构简单,便于操控,能够方便地调整飞轮所受磁阻。
29.2、本装置可应用于健身车、椭圆车和划船机等多种健身机械。
附图说明
30.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
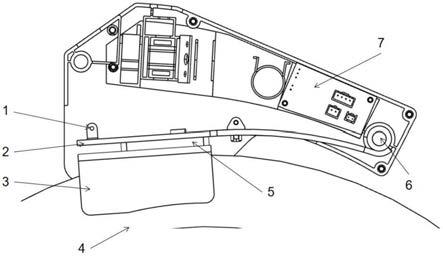
31.图1为外磁控模组结构主视示意图;
32.图2为外磁控模组结构立体结构示意图;
33.图3为张力传感器结构示意图;
34.图中所示:
35.具体实施方式
36.下面结合具体实施例对本实用新型进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本实用新型,但不以任何形式限制本实用新型。应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变化和改进。这些都属于本实用新型的保护范围。
37.实施例1
38.如图1和图2所示,一种外磁控模组结构,包括:磁阻模块、第一磁铁载体2、第二磁铁载体3、飞轮4和张力传感器5;磁阻模块安装在飞轮4一侧,磁阻模块一端安装第一磁铁载体2和第二磁铁载体3,第一磁铁载体2和第二磁铁载体3之间安装张力传感器5,飞轮4相对第二磁铁载体3做切割磁力线转动。磁阻模块远离第一磁铁载体2一端连接转轴6;转轴6轴向方向与飞轮4轴向方向平行,磁阻模块通过转轴6转动,张力传感器5电连接mcu控制板7。第一磁铁载体2背向第二磁铁载体3一侧安装外联点1;外联点1连接执行机构并通过执行机构移动,磁阻模块通过外联点1相对转轴6转动。
39.第二磁铁载体3设置为平面板两侧垂直向同一侧延伸出第一垂直板和第二垂直板。第一垂直板朝向第二垂直板一侧安装第一磁铁组,第二垂直板朝向第一垂直板一侧安装第二磁铁组,第一磁铁组和第二磁铁组之间形成第一磁场。当飞轮4转动时,飞轮4切割第一磁场并形成涡流,飞轮4通过涡流形成第二磁场。第一磁场和第二磁场之间产生粘滞效应,飞轮4通过粘滞效应产生与转动方向相反的阻力,第二磁铁载体3通过粘滞效应受向飞轮4方向的牵拉力。
40.如图3所示,张力传感器5两端分别设置固定孔8和受力孔9,张力传感器5通过固定孔8固定连接第一磁铁载体2,张力传感器5通过受力孔9固定连接第二磁铁载体3,当第二磁铁载体3受到牵拉力,张力传感器5通过牵拉力发生形变。
41.实施例2
42.实施例2作为实施例1的优选例。
43.本装置应用于健身和运动器材行业,用于健身车、椭圆车和划船机等健身机械,将磁阻阻力大小直接通过传感器来感应,并由微电脑芯片通过调节逻辑实现健身器械实际功率阻力和目标功率阻力之间的闭环控制。相较于通过探测磁铁位置间接对应于档位功率的方案(标定功率法)来说,这种以直接感应功率值并作为和目标值进行比对的实时闭环控制,将根本性的实现目标功率的精确调制,从而,使得锻炼者更加科学的制订和分析锻炼过程,彻底消除表显功率和实际功率不一致导致的差异。
44.本装置将磁铁载体一分为二,即第一磁铁载体2和第二磁铁载体3,3对磁铁粘贴于第二磁铁载体3内,在第一磁铁载体2和第二磁铁载体3之间安装有张力传感器5,张力传感器5右端固定于第一磁铁载体2上,作为固定端,张力传感器5左端固定于第二磁铁载体3上,作为受力端;当飞轮4旋转时,其上铝环切割第二磁铁载体3内部的第一磁场,在飞轮4铝环上形成涡流,涡流将产生第二磁场,两个磁场的相互作用,产生粘滞效应,飞轮4将在旋转时,通过这种粘滞效应把第二磁铁载体3向飞轮4旋转方向牵拉,这种牵拉力将使张力传感器5左右两端发生微小的形变,形变的大小和方向将实时感知牵拉力的大小和方向,mcu控制板7将实时检测该张力传感器5传来的数据,并和设定的目标值进行比对,通过执行机构作用于外联点1,调节第二磁铁载体3绕转轴6转动,从而动态实时精准找到目标值所示的第二磁铁载体3的位置,形成闭环控制。
45.本装置无需事先通过实验室标定磁场位置和磁阻、功率之间的关系,直接检测飞轮4受到的磁阻力的大小,实现运动者消耗功率的闭环控制,实时、精准、高效,彻底消除由于标定功率和实际功率之间的误差。
46.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖
直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
47.以上对本实用新型的具体实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本实用新型的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。