1.本实用新型涉及婴幼儿生长发育用品技术领域,具体属于一种多功能婴儿助爬器。
背景技术:
2.婴儿到七八个月的时候身体发育到了一定程度,婴儿可以开始爬行了,婴儿爬行对身体的发育具有很多好处,具体好处如下:
3.1、增加触觉刺激、认知发展;爬行对宝宝的动作与知能发展都占有举足轻重的作用,宝宝在爬行的过程中,手脚会因接触地面而得到不同地面给予不同的触觉刺激,有利于触觉集成,能帮助宝宝通过触觉学习,增加大脑的认知能力。2、训练肌力;通过爬行,双手、双脚、身体躯干也需要发展出足够的肌力来承受宝宝自己的体重。3、训练手、脚、大脑三者协调合作;宝宝爬行中,需要手、脚、大脑间良好的配合才能将身体往前移动,借由爬行练习手脚大脑协调运动,有利于孩子动作协调和稳定性。这样的练习可以帮助宝宝未来细动作发展,包括学习画画、用简单、学写字时,手跟大脑的协调、配合会更好。美国儿科医学会一份经过25年的长期研究发现,贴地爬行经验较少的孩子,上肢手臂无力、弯腰驼背的比例较高。这类型孩子时常呈现全身软趴趴的状态,无法直挺挺地坐好,总是喜欢东靠西倚,看起来懒洋洋的,实际上这是小时候没充分地爬行。4、训练视觉、空间跟距离感;借由自主爬行,宝宝可以依照自己的意愿爬去想要去的地方、或去拿到想要拿的东西,训练宝宝的手眼协调,对宝宝的视觉、空间跟距离感的发展都大有助益。5、增强心肺耐力;宝宝在爬行的时候,心肺消耗比在地上翻滚需要多消耗一倍以上;因此,爬行还可以增加心肺耐受力,为将来站立及快走时所需的心肺需求提前训练。6、产生自信心、增进大脑认知发展;爬行是宝宝身体有能力自主且准确移动的第一次经验,能大幅增加宝宝的自信心;同时也是宝宝开始自己扩展视野的第一步,借着累积多方面的刺激、经验、学习,对宝宝的认知发展有很大的帮助。
4.在婴儿爬行期对婴儿的爬行进行有效的引导和辅助,例如对婴儿爬行动作的纠正,爬行时,对手脚力量的控制等,对婴儿的形体发育有较大的好处,使婴儿肢体生长更加均衡、协调,增强婴儿身体以及肢体的力量,有利于婴儿肌肉和骨骼的生长,因此本实用新型提供了一种多功能的婴儿助爬器,对婴儿的爬行进行有效的引导和辅助,帮助婴儿健康快乐的成长。
技术实现要素:
5.为了解决上述问题,本实用新型设计了一种多功能婴儿助爬器,本实用新型的目的在于对婴儿的爬行动作进行引导和辅助,使婴儿爬行更加均衡、协调,有助于婴儿身体的发育。
6.为了达到上述技术目的,实现上述技术效果,本实用新型是通过以下技术方案实现的:
7.一种多功能婴儿助爬器,包括上固定板、下固定板、上肢固定架、下肢固定架,所述
上固定板下端固定安装两根调节杆,所述调节杆安插在下固定板上端在下固定板中伸缩移动,所述下固定板表面安装有锁定旋钮锁定调节杆的位置,所述上固定板和下固定板两端固定连接有第一固定带;
8.所述上肢固定架安装在上固定板的两端,所述下肢固定架安装在下固定板两端,所述上肢固定架包括大臂固定槽和小臂固定槽,所述大臂固定槽和小臂固定槽铰接在一起,所述小臂固定槽前端固定连接有手套,所述大臂固定槽和小臂固定槽上固定连接有第二固定带,所述下肢固定架包括大腿固定槽和小腿固定槽,所述大腿固定槽和小腿固定槽铰接,所述小腿固定槽尾端铰接有脚部固定板,所述大腿固定槽和小腿固定槽上固定连接有第三固定带,所述脚部固定板上固定连接有第四固定带;
9.所述上固定板两端分别固定安装有肩部驱动模块,所述大臂固定槽安装在肩部驱动模块上,所述下固定板两端固定安装有下肢驱动模块,所述大腿固定槽安装在下肢驱动模块上,所述肩部驱动模块和下肢驱动模块内安装有驱动电机;
10.所述上固定板内设置有控制器,所述控制器表面安装有显示屏、按键,控制器内设置有控制芯片、d/a转换器、a/d转换器、电源模块、继电器,所述显示屏和按键与a/d转换器连接,a/d转换器与控制芯片连接,控制芯片与d/a转换器连接,d/a转换器与继电器连接,继电器通过导线与肩部驱动模块或下肢驱动模块连接,电源模块为各元器件提供工作电压,通过按键输入指令,使控制芯片对肩部驱动模块和下肢驱动模块进行控制,所述控制器内设置有正反转电路,继电器连接在正反转电路上,所述肩部驱动模块和下肢驱动模块设置有驱动电机,驱动电机与正反转电路连接。
11.进一步的,所述第一固定带、第二固定带、第三固定带、第四固定带、第二固定带上设置有魔术贴。
12.进一步的,所述大臂固定槽、小臂固定槽、大腿固定槽和小腿固定槽为伸缩杆。
13.进一步的,所述调节杆为片状的金属杆,可进行弹性弯曲。
14.进一步的,所述大臂固定槽、小臂固定槽、大腿固定槽和小腿固定槽为弧形片状,内侧面固定设置有衬垫,保护婴儿肢体,防止压伤。
15.本实用新型的有益效果是:该助爬器可以辅助婴儿进行爬行,让婴儿爬行更加轻松,提高婴儿爬行积极性,有利于促进婴儿的身体发育,可以保持婴儿的爬行姿势,使婴儿发育更加均衡、协调,同时可切换爬行模式以及爬行速度,让婴儿可以进行腹爬和手膝爬两种模式,该助爬器可以根据不同婴儿的身材调节尺寸,以适应不同的婴儿,通过调节所述上固定板和下固定板的距离从而适应不同身高的婴儿,上固定板和下固定板之间的调节杆可以进行弹性弯曲,从而可以使婴儿腰部活动自由,而不受到束缚。
附图说明
16.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
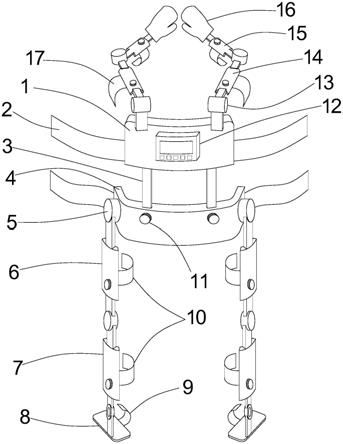
17.图1是本实用新型的结构示意图。
18.图2是所述控制器工作原理图。
19.图3是所述正反转电路的电路图。
20.附图中,各标号所代表的部件名称列表如下:
21.1-上固定板,2-第一固定带,3-调节杆,4-下固定板,5-下肢驱动模块,6-大腿固定槽,7-小腿固定槽,8-脚部固定板,9-第四固定带,10-第三固定带,11-锁定旋钮,12-控制器,13-肩部驱动模块,14-大臂固定槽,15-小臂固定槽,16-手套,17-第二固定带,18-控制芯片,19-电源模块,20-d/a转换器,21-继电器,22-正反转电路,23-显示屏,24-a/d转换器,25-按键。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
23.本实用新型涉及的控制芯片18使用at89c52型号单片机,所述继电器21选用汇港hrs2h型号继电器。
24.如图1-3所示,一种多功能婴儿助爬器,包括上固定板1、下固定板4、上肢固定架、下肢固定架,所述上固定板1下端固定安装两根调节杆3,所述调节杆3安插在下固定板4上端在下固定板4中伸缩移动,所述下固定板4表面安装有锁定旋钮11锁定调节杆3的位置,所述上固定板1和下固定板4两端固定连接有第一固定带2;
25.所述上肢固定架安装在上固定板1的两端,所述下肢固定架安装在下固定板4两端,所述上肢固定架包括大臂固定槽14和小臂固定槽15,所述大臂固定槽14和小臂固定槽15铰接在一起,所述小臂固定槽15前端固定连接有手套16,所述大臂固定槽14和小臂固定槽15上固定连接有第二固定带17,所述下肢固定架包括大腿固定槽6和小腿固定槽7,所述大腿固定槽6和小腿固定槽7铰接,所述小腿固定槽7尾端铰接有脚部固定板8,所述大腿固定槽6和小腿固定槽7上固定连接有第三固定带10,所述脚部固定板8上固定连接有第四固定带9;
26.所述上固定板1两端分别固定安装有肩部驱动模块13,所述大臂固定槽14安装在肩部驱动模块13上,所述下固定板4两端固定安装有下肢驱动模块5,所述大腿固定槽6安装在下肢驱动模块5上,所述肩部驱动模块13和下肢驱动模块5内安装有驱动电机;
27.所述上固定板1内设置有控制器12,所述控制器12表面安装有显示屏23、按键25,控制器12内设置有控制芯片18、d/a转换器20、a/d转换器24、电源模块19、继电器21,所述显示屏23和按键25与a/d转换器24连接,a/d转换器24与控制芯片18连接,控制芯片18与d/a转换器20连接,d/a转换器20与继电器21连接,继电器21通过导线与肩部驱动模块13或下肢驱动模块5连接,电源模块19为各元器件提供工作电压,通过按键25输入指令,使控制芯片18对肩部驱动模块13和下肢驱动模块5进行控制,所述控制器12内设置有正反转电路22,继电器21连接在正反转电路22上,所述肩部驱动模块13和下肢驱动模块5设置有驱动电机,驱动电机与正反转电路22连接。
28.所述第一固定带2、第二固定带17、第三固定带10、第四固定带9、第二固定带17上设置有魔术贴,通过魔术贴进行固定。所述大臂固定槽14、小臂固定槽15、大腿固定槽6和小
腿固定槽7为伸缩杆,可以根据婴儿手臂长度进行调节。所述调节杆3为片状的金属杆,可进行弹性弯曲。所述大臂固定槽14、小臂固定槽15、大腿固定槽6和小腿固定槽7为弧形片状,内侧面固定设置有衬垫,保护婴儿肢体,防止压伤。
29.本实用新型的具体实施例:使用时,根据婴儿的身材高低,调节上固定板1和下固定板4之间的距离,调节调节杆3长度,通过锁定旋钮11固定位置,然后将上固定板1和下固定板4安装在婴儿背部,通过第一固定带2绕在婴儿胸前与腹部进行固定,将大臂固定槽14、小臂固定槽15、大腿固定槽6和小腿固定槽7分别通过第二固定带17和第三固定带10固定在婴儿上肢和下肢,婴儿脚部踩在脚部固定板8上,通过第四固定带9固定;所述调节杆3为片状,可以弹性弯曲,可以根据婴儿背部的弯曲而弯曲,减轻对婴儿身体的束缚,使婴儿在爬行时,不影响身体的活动,婴儿手部佩戴在手套16中,婴儿在爬行时可以对手进行保护。
30.当婴儿进行腹爬时,婴儿使用手肘撑地,趴于地面上,腹部与地面接触,通过按键25选择爬行模式为腹爬,显示屏23上显示为腹爬模式,爬行模式指令传递至控制芯片18中,控制芯片18执行腹爬模式程序,肩部驱动模块13工作,下肢驱动模块5不工作,通过按键25选择爬行速度模式,爬行速度有低速、中速、高速,显示屏23上显示速度模式,a/d转换器24将模拟信号指令转换为数字信号传送至控制芯片18,控制芯片18接收到速度模式指令,执行相对应的速度模式程序,将数字信号转换成模拟电信号传送至肩部驱动模块13中,不同的电流大小对应不同的速度模式;
31.通过按键25选择爬行模式为手膝爬模式,婴儿手膝撑地,启动该助爬器,控制芯片18接收到为手膝爬模式命令,执行手膝爬模式程序,将数字信号经过d/a转换器20转换为模拟电信号,驱动肩部驱动模块13和下肢驱动模块5工作进行手膝爬行,通过控制器12对肩部驱动模块13以及下肢驱动模块5的助力、速度以及阻力进行设定。
32.该助爬器通过继电器21自动控制肩部驱动模块13和下肢驱动模块5内的驱动电机循环发生正转和反转,从而实现带动婴儿的肢体进行爬行动作,所述正反转电路22包括正转电路和反转电路,正转电路和反转电路分别连接有继电器21,通过控制芯片18程序控制继电器21的通断,从而控制正转电路和反转电路的通断,进而控制肩部驱动模块13和下肢驱动模块5内的驱动电机的正反转,实现爬行动作。
33.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
34.以上公开的本实用新型优选实施例只是用于帮助阐述本实用新型。优选实施例并没有详尽叙述所有的细节,也不限制该实用新型仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。