1.本实用新型涉及骨科康复训练设备技术领域,具体涉及一种骨科康复用踏步训练器。
背景技术:
2.踏步训练器是一种常见的用于对患者腿部骨骼康复,并进行相对应的腿部肌肉训练的设备,而现有的用于进行腿部康复训练的踏步训练器在实际的使用过程中,仅仅只能够带动腿部进行有规律的摆动,而就实际正常人的走路过程而言,其脚掌与脚趾之间在行走过程中会发生一定角度的转动,反观现有的用于进行腿部康复训练的踏步器并不能够对此动作进行恢复训练,而不能形成一定的肌肉记忆,进而导致通过现有的训练器训练后,患者在独立行走过程中还存在一定的困难,训练效果不够理想。
技术实现要素:
3.解决的技术问题
4.针对现有技术所存在的上述缺点,本实用新型提供了一种骨科康复用踏步训练器,能够有效地解决现有技术用于进行腿部康复训练的踏步训练器在实际的使用过程中,仅仅只能够带动腿部进行有规律的摆动,而就实际正常人的走路过程而言,其脚掌与脚趾之间在行走过程中会发生一定角度的转动,反观现有的用于进行腿部康复训练的踏步器并不能够对此动作进行恢复训练,而不能形成一定的肌肉记忆,进而导致通过现有的训练器训练后,患者在独立行走过程中还存在一定的困难,训练效果不够理想的问题。
5.技术方案
6.为实现以上目的,本实用新型通过以下技术方案予以实现:
7.本实用新型提供一种骨科康复用踏步训练器,包括底座,所述底座的两侧位置固定连接有安装板,所述安装板上连接有手扶杆,所述底座上设有两组训练模块,所述训练模块包括脚趾部、脚掌部以及安装部,所述安装部与脚趾部之间弹性连接,所述脚掌部的下端固定安装有滑轮组件,所述脚掌部与底座之间滑动配合。
8.进一步地,所述脚趾部与脚掌部之间采用转动连接的方式安装,且所述脚掌部的上端呈弧型结构固定安装有护踝垫,所述脚掌部的上端还粘接有橡胶带。
9.进一步地,所述安装部上端通过伸缩杆与脚趾部的下端外壁连接固定,且所述伸缩杆的两侧均设有弹簧,两个所述弹簧的两端分别与脚趾部的下端外壁以及安装部的上端外部连接。
10.进一步地,所述滑轮组件包括固定安装在脚掌部上的连接板,所述连接板的中部转动连接有滚轮,且所述滚轮外壁与开设在固定安装在底座上的导轨内壁滚动接触。
11.进一步地,所述安装部与底座之间滑动配合,且所述安装部为u型结构。
12.进一步地,还包括设置于两个训练模块中部之间的联动模块,所述联动模块包括两个分别固定安装在安装部外壁上的活塞杆,两个活塞杆的外壁与开设在底座内的连通槽
的内壁之间滑动配合,且所述连通槽内位于两个活塞杆中部之间填充有气体。
13.有益效果
14.本实用新型提供的技术方案,与已知的公有技术相比,具有如下有益效果:
15.本实用新型通过设置的训练模块,患者通过该设备进行训练时,能够在每次踏步的过程中,脚趾与脚掌之间都会发生角度的变化,以此能够更加贴切实际的行走过程,对腿部肌肉进行针对性的训练,形成肌肉记忆,进而在使用该设备训练后,能够实现快速的独立行走,提高训练的效果。
附图说明
16.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
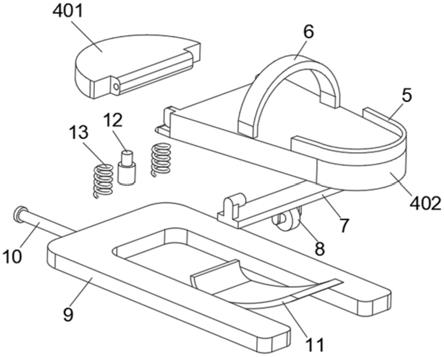
17.图1为本实用新型的整体结构示意图;
18.图2为本实用新型的训练模块整体结构示意图;
19.图3为本实用新型的训练模块爆炸结构示意图;
20.图4为本实用新型的训练模块在实际使用过程中结构示意图;
21.图中的标号分别代表:1、底座;2、安装板;3、手扶杆;4、训练模块;401、脚趾部;402、脚掌部;5、护踝垫;6、橡胶带;7、连接板;8、滚轮;9、安装部;10、活塞杆;11、导轨;12、伸缩杆;13、弹簧。
具体实施方式
22.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.下面结合实施例对本实用新型作进一步的描述。
24.实施例:一种骨科康复用踏步训练器,该训练装置在使用时将设置的底座1进行固定,而患者在进行康复训练时,手扶与底座1之间连接固定的手扶杆3,辅助患者进行腿部的运动,值得说明的是,该设备针对的是具有一定运动能力的患者,而非不能够自主进行运动的重度患者,包括底座1,底座1的两侧位置固定连接有安装板2,安装板2上连接有手扶杆3,底座1上设有两组训练模块4,设置的该训练装置4用于对患者的腿部进行训练,具体的在训练时,将患者的腿部放置在设置的每组训练模块4上,且针对单组训练模块4而言,通过分区的设置,当患者会将整个脚放置在训练模块4上时,患者的脚趾以及脚掌分别与设置的脚趾部401和脚掌部402相对应,并在通过设置的脚掌部402上的橡胶带6能够对患者的脚进行辅助的固定,保证患者在训练过程中腿部与该设备的稳定连接,训练模块4包括脚趾部401、脚掌部402以及安装部9,安装部9与脚趾部401之间弹性连接,脚掌部402的下端固定安装有滑轮组件,脚掌部402与底座1之间滑动配合,结合设置的脚掌部402与底座1之间通过滑轮组
件保持滑动连接的关系,在患者自主进行运动时,能够在进行踏步的过程中,对脚趾与脚掌之间角度进行训练,以此能够更加贴切实际的行走过程,对腿部肌肉进行针对性的训练,形成肌肉记忆,进而在使用该设备训练后,能够实现快速的独立行走,提高训练的效果。
25.根据附图2-4中所示,通过将脚趾部401与脚掌部402之间采用转动连接的方式进行连接,当患者在使用该设备进行训练的过程中,能够更好的模拟实际的行走过程,提高训练的效果,脚趾部401与脚掌部402之间采用转动连接的方式安装,且脚掌部402的上端呈弧型结构固定安装有护踝垫5,脚掌部402的上端还粘接有橡胶带6;
26.具体的该设备在使用时,当患者将脚放置在设置的训练模块4上并通过橡胶带6进行固定后,能够开始进行锻炼,通过患者腿部的力量以及设置的橡胶带6的辅助作用,能够带动设置的安装部9在底座1的内部进行滑动,且当设置的安装部9进行位置的调整时,由于设置的脚趾部401与脚掌部402之间的转动连接的关系,当脚趾部401随着安装部9同步向一侧进行移动时,由于设置的脚掌部402通过滑轮组件与底座1之间保持滑动配合的关系,当脚趾部401由于受到患者脚步力量的带动时,能够使得与其转动连接的脚掌部402进行同步的移动,而由于脚掌部402受到开设在底座1内部的导轨11的限位作用,能够使得设置的脚掌部402与脚趾部401之间发生一定角度的转动,进而结合附图4中所示,使得原本处于相对水平位置的脚趾部401与脚掌部402之间发生一定的偏移,且在角度发生转动的过程中,能够带动患者的腿部完成一次行走的动作,增强患者的肌肉记忆,值得说明的是,上述提到的安装部9的驱动力来源于患者腿部的力量,对于一些重度患者,或者是当患者进行一定的训练量后并不能够很好的主动的进行该动作时,能够通过固定安装与底座1内部的气缸,将气缸的输出端与安装部9进行连接固定,通过控制气缸输出端的往复移动,来辅助患者进行锻炼。
27.结合附图2-3中所示,通过将脚趾部401通过弹性连接的方式实现与安装部9之间的连接,其目的在于,当患者在使用该设备在进行锻炼时,且处于附图4中展示的状态中,当脚趾与脚掌之间存在一定的转动角度时,此时由于接触面积的减小,进而使得患者脚趾对脚趾部401的压力变大,进而通过设置的弹性连接的关系,能够减少患者脚部的肌肉的力量,避免由于短时间内压力的变换,而造成对患者肌肉的损伤,安装部9上端通过伸缩杆12与脚趾部401的下端外壁连接固定,且伸缩杆12的两侧均设有弹簧13,两个弹簧13的两端分别与脚趾部401的下端外壁以及安装部9的上端外部连接。
28.根据附图3中所示,该滑轮组件用于实现脚掌部402与安装部9之间的滑动连接,当患者在训练时,能够通过移动脚趾部401的位置来带动脚掌部402的移动,并且由于设置的导轨11呈弧型结构,在移动的过程中,能够带动脚掌部402发生一定角度的偏移,并且由于脚趾部401与底座1之间弹性连接,在运动的过程中,脚趾部401在移动方向的角度并不会发生变化,进而使得脚趾部401与脚掌部402之间能够发生角度的转动,以此能够更好的模拟处实际行走的过程,更好对患者腿部的肌肉进行训练,便于形成一定的肌肉记忆,滑轮组件包括固定安装在脚掌部402上的连接板7,连接板7的中部转动连接有滚轮8,且滚轮8外壁与开设在固定安装在底座1上的导轨11内壁滚动接触。
29.根据附图3中所示,该安装部9与底座1之间保持滑动配合的关系,并且用于驱动安装部9进行滑动的驱动力可以来源于患者腿部的力量,也可以通过配套的气缸吗,或者是通过电机带动滚轴丝杆转动的方式进行驱动,以此能够适用于不同训练阶段的患者,提高该
装置的适用范围,安装部9与底座1之间滑动配合,且安装部9为u型结构。
30.结合附图2-3中所示,设置于两个训练模块4中部之间的联动模块的目的在于,在实际的训练过程中,患者的两个腿部之间需要进行方向相反的移动,以此更加贴合实际的行走过程,而该联动模块通过两个与底座1之间保持滑动配合的活塞杆10,能够随着安装部9的滑动进行同步的移动,而当其中一个所属活塞杆10随着安装部9向前移动时,能够对活塞杆10位于的连通槽内的气体进行挤压,进而能够对另一个活塞杆10进行位置的调整,其辅助另一个活塞杆10的移动方向为向后移动,还包括设置于两个训练模块4中部之间的联动模块,联动模块包括两个分别固定安装在安装部9外壁上的活塞杆10,两个活塞杆10的外壁与开设在底座1内的连通槽的内壁之间滑动配合,且连通槽内位于两个活塞杆10中部之间填充有气体,且该气体在受到压力时,可以被压缩。
31.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不会使相应技术方案的本质脱离本实用新型各实施例技术方案的保护范围。