1.本发明涉及拼装玩具领域,具体涉及一种基于开源硬件的教育机器人智能控制系统。
背景技术:
2.拼装玩具能够锻炼孩子的动手能力,通过让孩子自己操作能够锻炼手部的协调性;培养孩子的想象力,如果玩具的组合方式较多(例如积木类型),孩子可以自行发挥自己的想象力进行创作,现有的拼装玩具虽然能够拼装出较复杂的形态,如各种小车,但是所利用的零件较多,拼装过程中容易产生混乱。
3.传统的玩具小车一方面不能自由组装,因此不能够根据用户的需求喜爱进行组装,实现不了个性化定制;另一方面传统的玩具不能自由组合功能模块,只能实现固定的功能,可玩性和创造性不强。多功能模块组合小车结合电子积木与玩具车的特点,加入可编程智能模块,既能自由组装,又能自由编程,功能强大,创造性强。
技术实现要素:
4.为此,本发明提供一种基于开源硬件的教育机器人智能控制系统,以解决现有拼装玩具功能单一、不能个性化组合创造的问题。
5.为了实现上述目的,本发明提供如下技术方案:
6.本发明公开了一种基于开源硬件的教育机器人智能控制系统,所述系统包括:车架、主控制器、显示屏、马达、模拟端口、数字端口和iic拓展端口,所述主控制器为开源控制器,能够根据实际需求写入控制程序,所述模拟端口具有多个,分别设置在车架的两侧,模拟端口与主控制器连接,所述数字端口和iic拓展端口设置在车架的前端部,数字端口和iic拓展端口均与主控制器连接,所述车架两侧开设有安装孔,多个功能模块通过安装孔与车架机械连接,多个功能模块通过模拟端口、数字端口和iic拓展端口与主控制器电连接,通过主控制器控制多个功能模块,所述车架底部安装有车轮,所述马达的输出端与车轮连接,所述主控制器设置在车架内部,所述显示屏安装在车架顶部并与主控制器连接。
7.进一步地,所述车架的顶部与显示屏相邻设置有电源开关和电源指示灯,通过电源开关控制整体的电源通断,所述电源指示灯显示供电状态。
8.进一步地,所述模拟端口分设在车架的两侧,模拟端口可以连接灰度传感器、声音传感器、电位器传感器、人体感应传感器、游戏摇杆传感器,通过模拟端口将采集的数据发送至主控制器。
9.进一步地,所述灰度传感器感知地面不同灰度值而产生的相应信号,作为巡线小车的巡线传感器或者足球机器人的场地灰度识别;所述声音传感器通过麦克风采集声音信号,转化为模拟信号,并通过反馈的电压值来体现声音大小;所述电位器传感器对电阻值进行感应,反馈实际的电阻值,所述人体感应传感器检测人体或动物身上发出的红外线,输出开关信号;所述游戏摇杆传感器采用优质金属ps2摇杆电位器制作,包括(x,y)两轴模拟输
出,一路按钮数字输出。
10.进一步地,所述数字端口连接按键传感器、超声波传感器、颜色传感器、环境光传感器、火焰传感器和温湿度传感器,通过数字端口将采集的数据发送至主控制器。
11.进一步地,所述按键传感器识别按键状态,按下为高电平,松开为低电平;所述超声波传感器通过超声波探头检测距离,输出相应的数字信号;所述颜色传感器通过光学感应识别物体表面颜色,根据不同颜色输出对应的具体数值;所述环境光传感器为基于环保型光敏二极管的光线传感器,对环境光线的强度进行检测;所述火焰传感器探测火焰或其它波长在760nm~1100nm范围内的光源,探测角度可达60
°
;所述温湿度传感器对环境中的温湿度进行检测,并将检测到的数据转换为数字信号。
12.进一步地,所述车架与数字端口相对的端部设置有外接电源口、usb下载口和多个马达端口,所述外接电源口接入外部电源,通过外接电源与电源开关连接,控制整体电源通断,所述usb下载口与主控制器连接,通过usb下载口向主控制器写入编程数据,所述马达端口与马达连接,向马达传送控制信号。
13.进一步地,所述马达包括单轴动力马达和双轴辅助马达,所述单轴动力马达进行单轴输出,提供一端输出,所述双轴辅助马达进行双轴输出,转速低于单轴动力马达的转速。
14.进一步地,所述双轴辅助马达连接有双出轴舵机,通过双出轴舵机与车轮连接。
15.本发明具有如下优点:
16.本发明公开了一种基于开源硬件的教育机器人智能控制系统,在车身上能够自由选择安装多个功能模块,通过模拟端口、数字端口与多个功能模块进行连接,实现对主控制器与多个功能模块之间的数据交互和指令传输。并且控制器为开源控制器,能够根据实际需求写入控制程序,如多种品牌类型的拼装模块能够互通互联,根据选择的功能模块不同,拼装小车的功能也不同,增加的可扩展空间,能够自由发挥,不受固定拼装模式的限制,实现多元化的拼装组合,增加趣味性。
附图说明
17.为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引申获得其它的实施附图。
18.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。
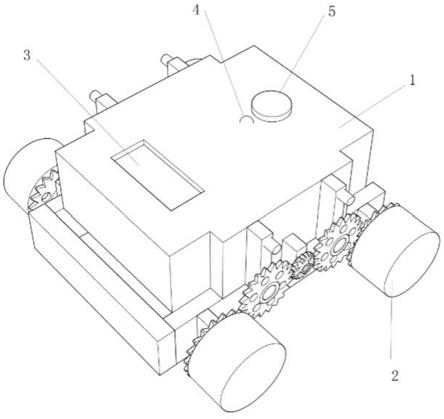
19.图1为本发明实施例提供的一种基于开源硬件的教育机器人智能控制系统整体结构示意图;
20.图2为本发明实施例提供的一种基于开源硬件的教育机器人智能控制系统的车架侧视结构图;
21.图3为本发明实施例提供的一种基于开源硬件的教育机器人智能控制系统的车架
另一视角侧视结构图;
22.图中:1-车架、2-车轮、3-显示屏、4-电源指示灯、5-电源开关、6-模拟端口、7-外接电源口、8-usb下载口、9-马达端口、10-数字端口、11-iic拓展端口。
具体实施方式
23.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.实施例
25.本实施例公开了一种基于开源硬件的教育机器人智能控制系统,所述基于开源硬件的教育机器人智能控制系统包括:车架1、主控制器、显示屏3、马达、模拟端口6、数字端口10和iic拓展端口11,所述主控制器为开源控制器,能够根据实际需求写入控制程序,所述模拟端口6具有多个,分别设置在车架1的两侧,模拟端口6与主控制器连接,所述数字端口10和iic拓展端口11设置在车架1的前端部,数字端口10和iic拓展端口11均与主控制器连接,所述车架1两侧开设有安装孔,多个功能模块通过安装孔与车架1机械连接,多个功能模块通过模拟端口6、数字端口10和iic拓展端口11与主控制器电连接,通过主控制器控制多个功能模块,所述车架1底部安装有车轮2,所述马达的输出端与车轮2连接,所述主控制器设置在车架1内部,所述显示屏3安装在车架1顶部并与主控制器连接。
26.车架1的顶部与显示屏3相邻设置有电源开关5和电源指示灯4,通过电源开关5控制整体的电源通断,所述电源指示灯4显示供电状态。显示屏3能够显示11
×
4个英文字符,可以个性化编辑显示屏3的显示内容,同样能够通过显示屏3展示小车运行状态,是否出现故障问题,进行故障提示。
27.模拟端口6分设在车架1的两侧,模拟端口6可以连接灰度传感器、声音传感器、电位器传感器、人体感应传感器、游戏摇杆传感器,通过模拟端口6将采集的数据发送至主控制器。
28.灰度传感器感知地面不同灰度值而产生的相应信号,作为巡线小车的巡线传感器或者足球机器人的场地灰度识别;所述声音传感器通过麦克风采集声音信号,转化为模拟信号,并通过反馈的电压值来体现声音大小;通过声音传感器能够控制小车运动方向;所述电位器传感器对电阻值进行感应,反馈实际的电阻值,能够通过电位器传感器学习arduino中模拟信号的处理,进而学习更多模拟传感器。所述人体感应传感器检测人体或动物身上发出的红外线,输出开关信号,可以应用于各种需要检测运动人体的场合,输出延迟时间(高电平)2-3秒左右,感应角度100
°
,感应距离为6米,输出指示灯在高电平时点亮;所述游戏摇杆传感器采用优质金属ps2摇杆电位器制作,包括(x,y)两轴模拟输出,一路按钮数字输出。游戏摇杆传感器的端口易于识别,两个模拟的输出接口上有s字样,数字接口标有d字样。
29.数字端口10连接按键传感器、超声波传感器、颜色传感器、环境光传感器、火焰传感器和温湿度传感器,通过数字端口10将采集的数据发送至主控制器。
30.按键传感器识别按键状态,按下为高电平,松开为低电平;模块自带指示灯,按下
时指示灯点亮;所述超声波传感器通过超声波探头检测距离,输出相应的数字信号;超声波探头体积小、环境适用性强、精度高、测量范围广,即插即用,方便快捷,在机器人自动避障行走,小车倒车报警方面具有较好的使用体验。
31.所述颜色传感器通过光学感应识别物体表面颜色,根据不同颜色输出对应的具体数值;颜色传感器采用iic拓展端口11,在距离物体3-10cm处检测,具有较好的技术效果。所述环境光传感器为基于环保型光敏二极管的光线传感器,对环境光线的强度进行检测;所述火焰传感器探测火焰或其它波长在760nm~1100nm范围内的光源,探测角度可达60
°
,火焰传感器性能稳定可靠,可以广泛应用于灭火机器人,通过火焰传感器与火焰报警器连接,有助于及时发现火情,进行报警;所述温湿度传感器对环境中的温湿度进行检测,并将检测到的数据转换为数字信号,响应快、抗干扰能力强。
32.数字端口10和模拟端口6连接的多种传感器能够让用户自由选择组合,提升组合的可能性,根据实际需求拼装出具有多种功能的小车。
33.车架1与数字端口10相对的端部设置有外接电源口7、usb下载口8和多个马达端口9,所述外接电源口7接入外部电源,向小车整体进行供电,通过外接电源与电源开关5连接,控制整体电源通断。
34.所述usb下载口8与主控制器连接,通过usb下载口8向主控制器写入编程数据,用户可以自由写入相应的程序数据,所述马达端口9与马达连接,向马达传送控制信号。
35.马达包括单轴动力马达和双轴辅助马达,所述单轴动力马达进行单轴输出,提供一端输出配备tt电机轴和十字轴两种出轴模式,方便搭建,9v电压下扭矩为:5cm
·
kg,转速为200转/分钟,所述双轴辅助马达进行双轴输出,供两端输出,配备tt电机轴和十字轴两种出轴模式,方便搭建,9v电压下扭矩为:5cm
·
kg,转速为150转/分钟。双轴辅助马达连接有双出轴舵机,通过双出轴舵机与车轮2连接,有助于对车轮2的控制,保持车身稳定。
36.本发明公开了一种基于开源硬件的教育机器人智能控制系统,在车身上能够自由选择安装多个功能模块,通过模拟端口6、数字端口10与多个功能模块进行连接,实现对主控制器与多个功能模块之间的数据交互和指令传输。根据选择的功能模块不同,拼装小车的功能也不同,增加的可扩展空间,能够自由发挥,不受固定拼装模式的限制,实现多元化的拼装组合,增加趣味性。
37.虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。