1.本实用新型属于康复器械技术领域,特别涉及一种用于上肢腕部的多自由度锻炼的训练器。
背景技术:
2.在上肢康复训练中,市面上针对腕部的产品极少,尤其是家庭式趣味性产品,并且目前的研究处于发展阶段,大部分产品仅能实现一种自由度的训练,极少类别的致动器可以实现多自由度弯曲运动,而且中风的后期康复训练主要是为了患者可以更好的回归社会,回归正常的生活,因此后期训练主要为作业治疗,针对日常生活,工作的常用动作进行训练,而市面现有的家庭式或者社区式康复产品极少数针对此进行产品设计。
技术实现要素:
3.本实用新型的目的在于提供一种用于上肢腕部的多自由度锻炼的训练器,以解决上述问题。
4.为实现上述目的,本实用新型采用以下技术方案:
5.一种用于上肢腕部的多自由度锻炼的训练器,包括底座、腕部活动模块和肘部固定架;腕部活动模块铰接在底座的一端,肘部固定架固定设置在底座上;
6.腕部活动模块包括半球体、握杆和滑动轨道;滑动轨道设置在半球体的内侧凹面上,握杆设置在滑动轨道内,能够在滑动轨道上滑动。
7.进一步的,滑动轨道为十字型轨道。
8.进一步的,握杆包括伸缩杆、手握球和磁力螺丝;磁力螺丝的一端设置在伸缩杆内部,手握球设置在伸缩杆的端部,磁力螺丝的另一端吸附在滑动轨道内。
9.进一步的,磁力螺丝与伸缩杆螺纹连接。
10.进一步的,腕部活动模块和底座通过合页铰接。
11.进一步的,肘部固定架为匹配肘部形状的凹槽结构。
12.进一步的,肘部固定架上设置有绑带。
13.与现有技术相比,本实用新型有以下技术效果:
14.本发明提供了一种用于人体手腕康复训练的多自由度的趣味性训练器,可以帮助患者实现腕关节掌侧屈、背侧屈,尺侧偏和桡侧偏,还有腕关节内翻外翻的旋转运动,保障患者训练过程中的安全性,可以提供远长于医师的康复训练时间,加快康复进程,同时避免二次伤害。该训练器有三大部分,其包括底部支撑,与底部相连接的腕部活动部分及肘部固定部分;所述的腕部活动部分涉及三种自由度,握杆部分能够实现腕部内翻,外翻的运动,腕部活动的半球体的轨道能够实现腕部掌屈,背屈以及内收,外收的运动。基于对日常生活中的常用动作进行分解,结合作业治疗的相关信息,结构简单,满足对三种自由度的训练,满足趣味性,提高患者训练兴趣,从而提升训练效率。
附图说明
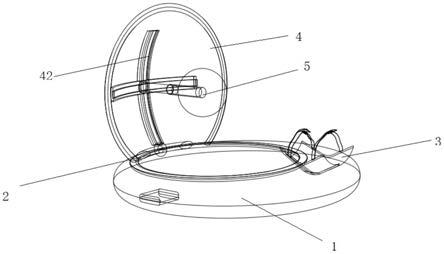
15.图1是本发明提供的用于上肢腕部多种自由度锻炼的趣味性训练器的结构示意图;
16.图2是用于上肢腕部多种自由度锻炼的趣味性训练器的底座连接肘部固定模块的结构示意图;
17.图3是用于上肢腕部多种自由度锻炼的趣味性训练器的用于腕部训练模块的结构示意图;
18.图4是用于上肢腕部多种自由度锻炼的趣味性训练器的握杆拆卸的结构示意图;
具体实施方式
19.以下结合附图对本实用新型进一步说明:
20.请参阅图1至图4,为实现上述目的,本发明提供了一种用于上肢腕部多自由度锻炼的趣味性训练器,该训练器有三大部分,其包括底座,与底座相连接的腕部活动部分及肘部固定器;所述的腕部活动模块涉及三种自由度,握杆部分能够实现腕部内翻,外翻的运动,腕部活动的半球体的轨道能够实现腕部掌屈,背屈以及内收,外收的运动。
21.所述握杆与半球体之间通过螺丝连接,可以实现安装拆卸,因此安装拆卸的过程可以满足手腕部内翻,外翻的运动;
22.所述半球体与与螺丝之间通过磁力链接,握杆安装之后,在半球中的十字型轨道上滑动,同时磁力所带来的一部分阻力,可以有效的对患者腕部掌屈,背屈以及内收,外收两种自由度进行锻炼;
23.所述用于上肢腕部多种自由度锻炼的趣味性训练器包括:安放在底座上的腕部活动部分以及肘部固定部分,肘部固定部分直接与底座相连,腕部活动部分以合页结构固定在底座上;
24.所述底部支撑模块包括:底座可与电子设备相连接,通过连接游戏以一种趣味性的方式进行锻炼引导;
25.所述腕部活动模块包括:固定在底座上的半球体以及与半球体相连接的握杆,握杆与螺丝连接固定在具有十字型轨道的半球体上,固定在半球体上的握杆包括手握部分以及可以伸缩滑动的摇杆,与具有磁力的螺丝相连接于半球体上;
26.所述肘部固定模块包括:医用塑料以及凯夫拉纤维或者碳纤维等材料组成双层的肘部固定部分。
27.实施例
28.本发明提供的用于人体腕部多种自由度锻炼的趣味性训练器,考虑到人的腕部主要包括三种运动,屈/背屈、内翻/外翻、内收/外收,最大运动幅度分别是掌屈60
°
到背屈60
°
、内收30
°
到外展30
°
、内翻80
°
到外翻80
°
。同时考虑到中风康复后期应结合作业治疗,因此针对手腕这三种自由度的运动功能,腕关节功能障碍患者需要外力来辅助其进行持续性被动训练运动以达到康复效果,本发明特别针对这三种自由度的训练在作业治疗的基础上进行了相应具有趣味性的设计。
29.如图1所示,本发明的实施例提供了一种用于人体腕部多种自由度锻炼的趣味性训练器,包括:底座1,肘部固定模块以及腕部活动的模块,其中:肘部固定器3的部分与底座
直接相连接,固定在底座上,而腕部活动模块4部分与底座以一种合页2的方式相连接。
30.底座支撑,通过与底座以合页方式连接的腕部运动模块可以在握杆拆卸后闭合在底座上,以达到节省空间和保护的作用。
31.所述肘部固定器3通过固定患者患侧上肢肘部,实现对肘部关节和上臂的支撑,同时通过固定肘部以防止肘部随意晃动。
32.所述腕部活动模块4用于帮助患者实现腕关节掌侧屈、背侧屈,尺侧偏和桡侧偏,包含腕部掌屈/背屈自由度和实现腕部内收/外收自由度以及块用于帮助患者腕关节的旋转,实现腕关节旋转自由度和对手臂的支撑。
33.如图2所示,所述的直接固定于底座的肘部固定器3通过对肘部的支撑固定以达到对腕部的训练。
34.如图3所示,作为一个优选实施方式,所述的腕部运动模块4,包括:半球体41;握杆5;滑动轨道42;磁力螺丝53,其中:
35.所述的握杆5在半球体中的轨道42中滑动,实现侧偏模式、侧屈模式这两种不同的工作模式,具体的:
36.握杆一头通过螺丝53以磁力固定在十字型轨道42中,患者通过将肘部固定在肘部固定的模块中,通过手握滑杆一头的握球进行操作,上下左右移动滑杆,以实现对腕部掌屈/背屈自由度和实现腕部内收/外收自由度的训练。
37.如图4所示,,作为一个优选实施方式,所述的握杆5包括:伸缩杆51以及手握球 52,其中:
38.所述的握杆可以通过拧动旋转与磁力螺丝53连接,实现手腕旋转的工作模式,具体的:
39.握杆一头通过螺丝53以磁力固定轨道中,患者在安装拆卸过程中,需要对准螺丝口,拧动以进行后续操作,在拧动连接的过程中,实现对腕部内翻/外翻自由度的训练
40.本发明辅助患者进行腕关节的掌侧屈/背侧屈、尺侧偏/桡侧偏和旋转三个自由度,结构简单,动作精细,在简单训练的基础上增加与游戏的结合,显著提升训练效果,与其他关节康复机器人具有融合性的三自由度腕部康复机械结构,该产品应对作业治疗的康复理论有一定的适应力。
41.本发明的上述实施例是为了清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定,对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动,这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所做的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。