1.本实用新型涉及跑步机领域,尤其涉及一种噪音小、提速快,跑步角度具备调节性又没有危险电压输入,跑步面无横向摆动且重垂线方向跳动小的无动力跑步机。
背景技术:
2.目前,公知的无动力跑步机在长方形承跑架四角的脚管处各有一只滚轮,滚轮的直径在90mm至120mm之间,在长度方向的一端两只滚轮共同与一根横轴固定结合,轴两端与承跑架的接轴管固定结合,两端滚轮之间设置有支撑板,支撑板固定结合于横管,横管与承跑架的长边管固定结合,长边管分别与脚管和接轴管固定结合构成基本的架体,围绕在滚轮、支撑板和横管外周的为一履带状结构体,履带状结构体由跑条、跑带和轴承三者共同组成,跑带厚度在1.2mm至3.5mm之间,其中跑条和轴承固定连接,跑条之间借助于软性的跑带形成软连接,借助轴承在支撑板上的滚动滑行和滚轮的旋转,形成履带的往复旋转,履带状结构体的上表面(即跑步面)的角度固定部件或承跑架固定部件结合了对角度起控制作用的电动装置。跑条为一根硬质片状条和一根软质片状条在表面叠加固定结合而成。
3.这样的履带跑步面在旋转时,容易出现不安全的横向摆动现象,在高速情形下易导致人的摔倒,而且履带状结构体随使用时间的增长而愈加松弛,这会引起跑步面在重垂线方向的跳动越来越大。而大量的轴承在承载架滑动面上的滑动会造成大量的噪音。滚轮的直径在90mm至120mm之间,直径偏小,会造成跑步面的阻滞力大,提速困难的问题。跑带厚度在1.2mm至3.5mm之间,跑带偏薄易磨损,会造成跑带更换频繁的情况。最后,控制跑步面角度的电动装置较多,不仅制造成本大,且一旦其中一个电动装置故障会导致整个设备的调节控制系统瘫痪,而220v电源的输入更是一种不安全隐患。一硬一软两种片状条的叠加结合使得传统跑条又厚又重,导致整机重量居高不下。
技术实现要素:
4.本实用新型针对现有技术中存在的噪音大、提速慢,跑步角度不具备调节性且存在危险电压输入,跑步面有横向摆动且重垂线方向跳动大等缺陷,提供了新的一种无动力跑步机。
5.为了解决上述技术问题,本实用新型通过以下技术方案实现:
6.一种无动力跑步机,包括跑条、跑带、滚轮轴、承跑架脚管、滚轮、接轴管、侧边管、横管,所述跑条与所述跑带通过螺丝固定,所述滚轮为四个,所述滚轮轴为两根,一根所述滚轮轴上连接有两个所述滚轮,所述接轴管与所述承跑架脚管连接,所述承跑架脚管与所述侧边管连接,所述侧边管与所述横管连接,还包括四根相同的调节螺杆、两个相同的左侧凹形块、两个相同的右侧凹形块、四个相同的调节螺帽、两根相同的导向轴、两个相同的导轴架、两个相同的导轴螺帽、两根相同的固定轴、轴承螺帽、锁紧螺丝、两块相同的立弧板、四个相同的调节脚垫、两个相同的脚垫调节件,所述左侧凹形块、所述右侧凹形块固定于所述接轴管的内侧,每根所述滚轮轴的两端设置有螺纹孔,每个所述左侧凹形块形成有一个
左侧凹槽部位,每根所述滚轮轴左侧的螺纹孔借助一根调节螺杆和一个调节螺帽调节式连接于对应的左侧凹形块的左侧凹槽部位,每个所述右侧凹形块形成有一个右侧凹槽部位,每根所述滚轮轴右侧的螺纹孔借助一根所述调节螺杆和一个调节螺帽调节式连接于对应的所述右侧凹形块的右侧凹槽部位,所述导轴架固定于所述承跑架脚管的内侧,每个所述导轴架形成有一个凹口空间,每根所述导向轴借助一个所述导轴螺帽、一个所述固定轴固定于一个所述导轴架的凹口空间,所述立弧板的内侧面上设置有包胶轴承,所述包胶轴承通过轴承螺帽、锁紧螺丝与所述立弧板转动连接,所述包胶轴承和所述立弧板以无动力跑步机长度方向的中心线为对称轴对称分布,所述立弧板平行于无动力跑步机长度方向的中心线,所述立弧板与所述横管的上表面连接,所述滚轮的直径范围为125mm-195mm,所述跑带的厚度范围为4mm-9mm,所述承跑架脚管上设置有脚垫板,每个所述调节脚垫通过与该所述调节脚垫固定结合的脚垫调节件与一个所述脚垫板调节式连接,跑条的内部设置有均匀分布的线条。
7.当跑条和跑带出现横向摆动和沿重垂线方向的跳动时,通过旋转调节螺杆以增大前后滚轮之间的张力,使下垂的跑带边沿上升,直至跑带两侧与设置在左右的导向轴靠齐,消除了跑带松弛的余量所导致的在重垂线方向上的跳动,同时由于跑带在循环转动时两侧边始终被导向轴所限制,使得跑带只能在限定的区域内运动,从而消除了横向摆动。立弧板与包胶轴承的固定结合,使包胶轴承只转动而不与跑带同步运动,减少了轴承在运动的过程中产生的噪音。大于传统直径的滚轮使得在相同脚踏力的情况下跑步的脚感更加轻盈,提速方便。相对于传统的跑带,增大的厚度使得跑带的使用寿命延长,避免了跑带的频繁更换。当需要改变本实用新型的角度时,调整调节脚垫相对于脚垫板的距离从而改变跑步面的角度,这样的调节方式还使跑步机避免了电动式角度控制系统的复杂构造和高昂的制造成本以及危险的高输入电压。
8.作为优选,上述所述的一种无动力跑步机,所述滚轮轴两端螺纹孔的轴线平行且垂直于所述滚轮轴的轴线。
9.在前后方向调节滚轮轴距离时,确保了前后滚轮轴始终处于平行状态,使得左右滚轮对跑带在四角的张力保持平衡。
10.作为优选,上述所述的一种无动力跑步机,所述左侧凹形块的前后孔为圆形通孔,所述右侧凹形块的前后孔为长轴平行于所述滚轮轴轴线的扁圆孔。
11.左侧凹形块的前后孔为圆形通孔,右侧凹形块的前后孔为长轴平行于所述滚轮轴轴线的扁圆孔,有效地消除了大量制造过程中产生的左侧凹形块、右侧凹形块中心距累积偏差所造成的滚轮轴因孔位偏离而导致的装配困难。
12.作为优选,上述所述的一种无动力跑步机,所述导向轴以无动力跑步机宽度方向的重垂中线为对称轴对称分布,从上至下呈现为对称点距逐渐增大的倾斜状。
13.导向轴对称式倾斜状设置,在调节时会对称出现侧摆限制点,更好地对跑带的活动范围进行限制,从而减少跑带的横向摆动。
14.作为优选,上述所述的一种无动力跑步机,所述包胶轴承的外环部位为软质材料。
15.包胶轴承与跑带为柔性接触,更进一步降低了噪音的发生。
16.作为优选,上述所述的一种无动力跑步机,所述线条为丝线状,在所述跑条的内部宽度方向均匀分布,所述线条为软性材质,其余为硬性材质。
17.所述硬质材料为玻璃钢材料,所述软质材料为玻璃纤维,跑条由抗拉强度大的玻璃纤维均衡分布于硬度大的玻璃钢材料中而形成,使得跑条不仅有强大的抗折性能还有足够的硬度以适应人的脚踏力,还具备重量轻的优点。
附图说明
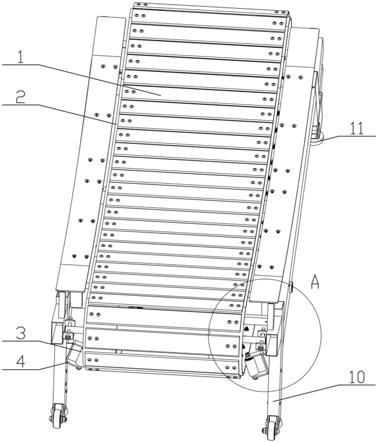
18.图1为本实用新型的结构示意图一;
19.图2为图1中a处的局部放大图;
20.图3为本实用新型的正视图;
21.图4为本实用新型的结构示意图二;
22.图5为图4中b处的局部放大图;
23.图6为本实用新型的结构示意图三;
24.图7为本实用新型中导向轴的结构示意图;
25.图8为本实用新型的结构示意图四;
26.图9为本实用新型中左侧凹形块的结构示意图;
27.图10为本实用新型中右侧凹形块的结构示意图;
28.图11为本实用新型中跑条的结构示意图一;
29.图12为本实用新型中跑条的结构示意图二。
具体实施方式
30.下面结合附图1-12和具体实施方式对本实用新型作进一步详细描述,但它们不是对本实用新型的限制:
31.实施例1
32.一种无动力跑步机,包括跑条1、跑带2、滚轮轴7、承跑架脚管10、滚轮12、接轴管171、侧边管172、横管18,所述跑条1与所述跑带2通过螺丝固定,所述滚轮12为四个,所述滚轮轴7为两根,一根所述滚轮轴7上连接有两个所述滚轮12,所述接轴管171与所述承跑架脚管10连接,所述承跑架脚管10与所述侧边管172连接,所述侧边管172与所述横管18连接,还包括四根相同的调节螺杆8、两个相同的左侧凹形块91、两个相同的右侧凹形块92、四个相同的调节螺帽62、两根相同的导向轴3、两个相同的导轴架4、两个相同的导轴螺帽61、两根相同的固定轴5、轴承螺帽63、锁紧螺丝14、两块相同的立弧板13、四个相同的调节脚垫11、两个相同的脚垫调节件64,所述左侧凹形块91、所述右侧凹形块92固定于所述接轴管171的内侧,每根所述滚轮轴7的两端设置有螺纹孔,每个所述左侧凹形块91形成有一个左侧凹槽部位911,每根所述滚轮轴7左侧的螺纹孔借助一根调节螺杆8和一个调节螺帽62调节式连接于对应的左侧凹形块91的左侧凹槽部位911,每个所述右侧凹形块92形成有一个右侧凹槽部位921,每根所述滚轮轴7右侧的螺纹孔借助一根所述调节螺杆8和一个调节螺帽62调节式连接于对应的所述右侧凹形块92的右侧凹槽部位921,所述导轴架4固定于所述承跑架脚管10的内侧,每个所述导轴架4形成有一个凹口空间41,每根所述导向轴3借助一个所述导轴螺帽61、一个所述固定轴5固定于一个所述导轴架4的凹口空间41,所述立弧板13的内侧面上设置有包胶轴承15,所述包胶轴承15通过轴承螺帽63、锁紧螺丝14与所述立弧板13转动连接,所述包胶轴承15和所述立弧板13以无动力跑步机长度方向的中心线为对称轴对
称分布,所述立弧板13平行于无动力跑步机长度方向的中心线,所述立弧板13与所述横管18的上表面连接,所述滚轮12的直径范围为125mm-195mm,所述跑带2的厚度范围为4mm-9mm,所述承跑架脚管10上设置有脚垫板16,每个所述调节脚垫11通过与该所述调节脚垫11固定结合的脚垫调节件64与一个所述脚垫板16调节式连接,跑条1的内部设置有均匀分布的线条20。
33.作为优选,所述滚轮轴7两端螺纹孔的轴线平行且垂直于所述滚轮轴7的轴线。
34.作为优选,所述左侧凹形块91的前后孔为圆形通孔,所述右侧凹形块92的前后孔为长轴平行于所述滚轮轴7轴线的扁圆孔。
35.作为优选,所述导向轴3以无动力跑步机宽度方向的重垂中线为对称轴对称分布,从上至下呈现为对称点距逐渐增大的倾斜状。
36.作为优选,所述包胶轴承15的外环部位为软质材料。
37.作为优选,所述线条20为丝线状,在所述跑条1的内部宽度方向均匀分布,所述线条20为软性材质,其余为硬性材质。
38.在图1、图2、图3和图7中,承跑架脚管10的内侧固定结合了导轴架4,导向轴3借助固定轴5和导轴螺帽61固定于导轴架4上,导向轴3对称分布于跑带2的两侧,呈对称点距自上而下逐渐增大的倾斜状,左侧凹形块91、右侧凹形块92固定结合于接轴管171的内侧,滚轮轴7的螺纹孔与调节螺杆8的螺纹规格一致。由调节螺杆8依次穿过左侧凹形块91的前孔(图1、图2、图3中被调节螺杆8盖住的孔定义为前孔,另一个孔定义为后孔)、滚轮轴7的螺纹孔和左侧凹形块91的后孔,接着再取调节螺杆8依次穿过右侧凹形块92的前孔、滚轮轴7的螺纹孔和右侧凹形块92的后孔,旋转调节螺杆8使滚轮轴7被限定在适宜的位置,锁死滚轮轴7两端的调节螺帽62实现对滚轮轴7位置的锁定。当跑带2松弛且其下垂边沿脱离了导向轴3的外壁,从而导致跑步面出现横向摆动和重垂线方向的跳动时,在滚轮轴7的两端解开调节螺帽62,通过旋转调节螺杆8增大前后滚轮轴7之间的张力,消除跑带2的余量,使跑带2的边沿与导向轴3的外壁靠齐,使跑带2的运动被限定在两导向轴3与跑带2靠齐点之间的范围内,锁死调节螺帽62,获得对滚轮轴7新的准确定位,从而消除了跑带2的横向摆动和重垂线方向的跳动。
39.在图4和图5中,立弧板13与包胶轴承15借助于锁紧螺丝14和轴承螺帽63固定结合,在跑带2的运动过程中包胶轴承15只转动而不与跑带2同步运动,大大减少了与跑带2撞击碰擦所发出的噪音,包胶轴承15的表面包覆有软质材料,其与跑带2之间的接触为柔性接触,又进一步减少了噪音的发生,使得跑步过程变得安静,传统的滚轮12直径在90mm-120mm,采用125mm-195mm的直径使得相同脚踏力可以获得更大的力矩值,提高了本实用新型使用的舒适度。
40.在图1和图2中,跑带2的厚度为4mm-9mm,大于传统跑带2的厚度1.2mm-3.5mm,大大降低了跑带2的更换频率。
41.在图6中,承跑架脚管10与脚垫板16固定结合,脚垫板16借助于脚垫调节件64与调节脚垫11形成可调式结合,当跑步面的角度不适合个人要求时,解开脚垫调节件64,旋转调节脚垫11进行调整直至跑步面的角度适合个人要求,锁紧脚垫调节件64,其结构和操作简单又安全。
42.在图11、图12中,所述硬质材料为玻璃钢材料,所述软质材料为玻璃纤维,跑条1由
抗拉强度大的玻璃纤维均衡分布于硬度大的玻璃钢材料中固定结合而成,使得跑条1不仅有强大的抗折性能还有足够的硬度以适应人的脚踏力,还具备重量轻的优点。
43.总之,以上所述仅为本实用新型的较佳实施例,凡依本实用新型申请专利的范围所作的均等变化与修饰,皆应属本实用新型的涵盖范围。