1.本发明涉及医疗康复训练器材领域,特别涉及一种外科肘关节术后恢复用训练装置。
背景技术:
2.康复医学是一门研究残疾人及患者康复的医学应用学科,其目的在于通过物理疗法,运动疗法,生活训练,技能训练,言语训练和心理咨询等多种手段使病伤残者尽快的得到最大限度的恢复,使身体残留部分的功能得到最充分的发挥,达到最大可能的生活自理,劳动和工作的能力,为病伤残者重返社会打下基础。
3.肘关节手术后,最常见的并发症包括肘关节僵硬和肘关节活动范围受限,为提高治疗效果和生活质量,术后需进行早期康复训练,加速肘关节功能的恢复,预防并发症发生,肘关节康复训练时,不能完全依赖康复训练装置的辅助功能,病人在康复训练时也需要进行发力训练,让康复装置仅仅提供辅助。
4.肘关节术后恢复训练动作通常为:
5.训练者手握两根固定的拉绳,并调整姿势至呈倾斜状态,且面部朝上,训练者通过手肘活动拉动身体改变身体与地面的倾斜角度,使小臂与大臂之间的角度改变,进行活动恢复训练,动作要点为:
6.1.大臂紧贴身体沿肩部做周转摆动,使大臂的周转摆动方向保持一致,减少关节负担;
7.2.小臂紧贴身体沿大臂做周转摆动,使小臂的周转摆动方向保持一致,减少关节负担;
8.3.腰背保持挺直,使活动部位为手肘,提高训练效果。
9.由于术后手肘活动受限,手肘恢复训练时会给训练者带来一定程度的痛苦,训练者本能得会倾向于减少痛苦,因此动作容易变形,常表现为:
10.1.小臂沿大臂摆动至受限位置时,训练者会自然的使小臂和大臂的离开身体,达到看似更大的训练摆动角度,但实际动作在小臂和大臂的离开身体后的活动部位不再以手肘活动为主,对手肘的恢复训练帮助极小;
11.2.腰背不挺直,依靠肩胛骨的前后活动达到看似更大的训练摆动角度,弊端同上;
12.3.在重力作用下,活动过程中胯部下垂,使下半身与地面的角度和上半身与地面的角度不一致,使上半身几乎与地面垂直,不仅加重腰部负担,而且容易使动作变成全身运动的“引体向上”,更容易引起上述动作变形。
13.因此现有技术的训练过程需要不断的有人指导并纠正动作,以达到最佳的训练效果,但训练者由于身体与地面倾斜,容易打滑,动作很难保持,且训练者训练时所受拉力均由自身体重、身体形成的杠杆长度和受力角度决定,因此不利于针对不同恢复期的进行合适的配重,且由于训练时受力角度不断变化,且动作变形时身体形成的杠杆长度也不断变化,因此训练负重也不断变化,变化的力容易使训练者超出自身受力极限,导致手肘受伤,
因此为便于训练者的自主正确训练,并保持训练配重的稳定性,提出一种外科肘关节术后恢复用训练装置。
技术实现要素:
14.本发明提供一种外科肘关节术后恢复用训练装置,可以解决现有技术中所存在的不便于训练者的自主正确训练,动作容易变形的问题。
15.一种外科肘关节术后恢复用训练装置,包括机架、躺椅、锻炼装置和配重装置,其中:
16.所述机架包括底座、支撑柱和第一支撑杆,所述底座上端固定连接有支撑柱,所述支撑柱上设置有第一支撑杆,所述躺椅设置在所述底座,所述配重装置设置在所述底座上;
17.所述躺椅包括躺板、脚垫、压力传感器和蜂鸣器,所述躺板上端开设有阻尼滑槽,所述阻尼滑槽内可滑动地连接有两个阻尼滑块,所述阻尼滑块的上端固定连接有所述压力传感器,所述压力传感器信号连接至控制器,所述蜂鸣器固定连接至所述躺板,所述蜂鸣器信号连接至所述控制器,所述躺板一侧固定连接有所述脚垫;
18.两个所述锻炼装置对称设置在所述躺板的两侧,所述锻炼装置包括套板、臂挡、支撑块、握把、导向辊和第一拉绳,所述支撑块设置在所述第一支撑杆上,所述支撑块远离所述第一支撑杆的一端可滑动地连接有所述套板,所述套板远离所述支撑杆的一端固定连接有所述握把,所述套板远离所述躺板的一端固定连接有所述臂挡,所述臂挡伸出所述套板固定连接有所述握把的一侧,所述第一拉绳的一端固定连接至所述套板、另一端固定连接至所述配重装置;
19.还包括调高装置,所述调高装置包括第一滑块、铰接剪叉和支撑台,所述支撑台的下端开设有限位滑槽,所述底座开设有第一滑槽,所述第一滑块可滑动的连接至所述第一滑槽,所述铰接剪叉下端的一侧铰接至所述底座、另一侧铰接至所述第一滑块,所述铰接剪叉的上端一侧铰接至所述支撑台的下端,另一端通过销轴可滑动地连接至所述限位滑槽,所述第一滑槽内可转动地连接有第一螺纹杆,所述第一螺纹杆螺纹连接至所述第一滑块,所述底座固定连接有第二电机,所述第二电机的输出轴传动连接至所述第一螺纹杆,所述支撑台上设置有所述躺椅。
20.进一步的,所述躺椅上通过调位装置连接至所述支撑台,所述调位装置包括第三螺纹杆、第四螺纹杆和转套,所述支撑台开设有第三滑槽,所述第三滑槽可转动的连接有所述第三螺纹杆的一端,所述第三螺纹杆远离所述支撑台的一端可转动地连接有所述转套,所述转套的另一端可转动地连接有所述第四螺纹杆,所述第四螺纹杆的另一端可转动地连接至所述第三滑槽的侧壁,所述第三螺纹杆上螺纹连接有第三滑块,所述第三滑块可滑动地连接至所述第三滑槽,所述第三滑块铰接有第一铰接杆,所述第一铰接杆的另一端铰接至所述躺椅的下端,所述第四螺纹杆上螺纹连接有第四滑块,所述第四滑块可滑动地连接至所述第三滑槽,所述第四滑块铰接至所述躺椅的下端,所述支撑台固定连接有第三电机;
21.所述调位装置还包括切换装置,所述第三电机传动连接至切换装置,所述切换装置至少包括第一工作状态和第二工作状态:
22.当所述切换装置处于第一工作状态时,所述切换装置传动连接至所述第三螺纹杆;
23.当所述切换装置处于第二工作状态时,所述切换装置传动连接至所述第三螺纹杆和所述第四螺纹杆。
24.进一步的,所述切换装置还包括传动杆,所述第三螺纹杆内部开设有第一滑孔,所述传动杆套接至所述第一滑孔,所述第三螺纹杆靠近所述转套的一端开设有第一传动腔,所述第一传动腔开设有花键槽,所述第四螺纹杆靠近所述转套的一端开设有第二传动腔,所述第二传动腔开设有花键槽,所述传动杆固定连接有传动块,所述传动块开设有花键,所述花键可滑动地连接至所述花键槽;
25.所述传动块至少包括第三工作状态和第四工作状态:
26.当所述传动块位于第三工作状态时,所述花键完全位于所述第一传动腔的花键槽,所述花键完全脱离所述第二传动腔的花键槽;
27.当所述传动块位于第四工作状态时,所述花键部分位于所述第一传动腔的花键槽,所述花键另一部分位于所述第二传动腔的花键槽;
28.所述传动杆的一端贯穿至外界,并通过花键传动连接有第一传动块,所述第一传动块可转动地连接至所述支撑台,所述第三电机传动连接至所述第一传动块。
29.进一步的,所述第一传动块固定连接有第一带轮,所述第三电机的输出轴传动连接有第二带轮,所述第一带轮与所述第二带轮通过皮带相互传动连接。
30.进一步的,所述调位装置还包括操作装置,所述操作装置包括固定块,滑动块、滑动杆和拨叉,所述固定块固定连接至所述支撑台的一侧,所述固定块开设有滑动槽,所述滑动槽可滑动地连接有所述滑动块,所述滑动块固定连接有滑动杆,所述滑动杆穿过所述固定块,所述滑动杆可滑动地连接至所述固定块,所述传动杆的一端固定连接有拨块,所述滑动杆远离所述滑动块的一端固定连接有拨叉,所述滑动块的上端固定连接有拨杆,所述拨叉卡接至所述拨块,所述操作装置用于切换所述传动块的工作状态。
31.进一步的,所述调位装置还包括卡接槽和转杆,所述第四螺纹杆开设有第二滑孔,所述第二滑孔套接有所述转杆,所述转杆靠近所述传动块的一端可转动地连接至所述传动块,所述转杆远离所述传动块的一端贯穿至外界并固定连接有卡接头,所述卡接槽套接至所述转杆,所述卡接槽固定连接至所述支撑台,所述卡接槽对应所述卡接头设置。
32.进一步的,所述臂挡靠近所述握把的一侧粘接有海绵垫。
33.进一步的,所述压力传感器的一侧固定连接有距离传感器,所述距离传感器信号连接至所述控制器。
34.有益效果:通过臂挡定位训练者小臂与大臂的活动范围,躺椅防止训练者的胯部下垂,躺板上的压力传感器使用时传递压力信号,调整至训练者的肩部位置,当两个压力传感器接收到的压力差值超出预设阈值、或者单个压力传感器接收到的压力波动范围超出预设阈值时,控制器接收信号判定训练者姿势不标准,发出信号至蜂鸣器对训练者提供提醒。
附图说明
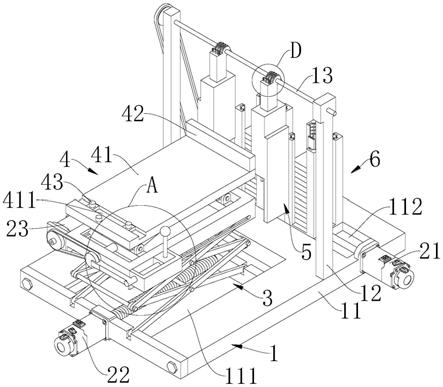
35.图1为本发明提供的一种外科肘关节术后恢复用训练装置的西北轴侧结构示意图;
36.图2为本发明提供的一种外科肘关节术后恢复用训练装置的东北轴侧结构示意图;
37.图3为为本发明提供的一种外科肘关节术后恢复用训练装置的西南轴侧结构示意图;
38.图4为本发明提供的一种外科肘关节术后恢复用训练装置的正视图;
39.图5为本发明提供的一种外科肘关节术后恢复用训练装置的俯视图;
40.图6为图5中b-b处的局部结构放大示意图;
41.图7为图1中a处的局部结构放大示意图;
42.图8为图1中d处的局部结构放大示意图;
43.图9为图6中f处的局部结构放大示意图;
44.图10为图6中e处的局部结构放大示意图;
45.图11为本发明提供的一种外科肘关节术后恢复用训练装置的配重装置的轴侧结构示意图;
46.图12为本发明提供的一种外科肘关节术后恢复用训练装置的配重装置的俯视图;
47.图13为图12中c-c处的局部结构放大示意图;
48.图14为本发明提供的一种外科肘关节术后恢复用训练装置的配重装置的轴侧结构示剖视图;
49.图15为图13中g处的局部结构放大示意图;
50.图16为图14中h处的局部结构放大示意图。
51.附图标记说明:
52.1-机架,11-底座,111-第一滑槽,112-第二滑槽,113-第一螺纹杆,114-第二螺纹杆,12-支撑柱,13-第一支撑杆,21-第一电机、22-第二电机,23-第三电机,3-调高装置,31-第一滑块,32-铰接剪叉,33-支撑台,331-限位滑槽,332-第三滑槽,4-躺椅,41-躺板,411-阻尼滑槽,42-脚垫,43-压力传感器,44-蜂鸣器,5-锻炼装置,51-套板,52-臂挡,53-支撑块,54-握把,541-第一抠块,542-第二抠块,55-导向辊,56-第二限位槽,57-第一拉绳,58-第二拉绳,59-第三拉绳,6-配重装置,61-第二滑块,611-限位框,62-限位角板,621-滚子,63-配重块,631-定位槽,632-组装齿条,64-限位滑块,641-容纳槽,642-让位槽,65-第一齿轮,651-棘轮槽,652-止动块,66-第二齿轮,67-第三齿轮,671-第一定位块,672-第二定位块,68-楔形块,681-第一弹簧,69-配合齿条,691-第二弹簧,7-调位装置,71-固定块,72-滑动块,721-滑动杆,73-拨杆,74-拨叉,75-传动杆,751-拨块,752-传动块,753-卡接头,754-转杆,76-第三螺纹杆,761-第三滑块,762-第一传动腔,77-第四螺纹杆,771-第四滑块,772-第二传动腔,78-卡接槽,79-转套。
具体实施方式
53.下面结合附图,对本发明的一个具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
54.具体实施例1:
55.如图1至图2所示,本发明实施例提供的一种外科肘关节术后恢复用训练装置,包括机架1、躺椅4、锻炼装置5和配重装置6,其中:
56.机架1包括底座11、支撑柱12和第一支撑杆13,底座11上端固定连接有支撑柱12,支撑柱12上设置有第一支撑杆13,躺椅4设置在底座11,配重装置6设置在底座11上;
57.躺椅4包括躺板41、脚垫42、压力传感器43和蜂鸣器,躺板41上端开设有阻尼滑槽411,阻尼滑槽411内可滑动地连接有两个阻尼滑块,阻尼滑块的上端固定连接有压力传感器43,压力传感器43信号连接至控制器,蜂鸣器固定连接至躺板41,蜂鸣器信号连接至控制器,躺板41一侧固定连接有脚垫42,压力传感器43的一侧固定连接有距离传感器,距离传感器信号连接至控制器;
58.两个锻炼装置5对称设置在躺板41的两侧,锻炼装置5包括套板51、臂挡52、支撑块53、握把54、导向辊55和第一拉绳57,支撑块53设置在第一支撑杆13上,支撑块53远离第一支撑杆13的一端可滑动地连接有套板51,套板51远离支撑杆的一端固定连接有握把54,套板51远离躺板41的一端固定连接有臂挡52,臂挡52伸出套板51固定连接有握把54的一侧,第一拉绳57的一端固定连接至套板51、另一端固定连接至配重装置6,臂挡52靠近握把54的一侧粘接有海绵垫;
59.还包括调高装置3,调高装置3包括第一滑块31、铰接剪叉32和支撑台33,支撑台33的下端开设有限位滑槽331,底座11开设有第一滑槽111,第一滑块31可滑动的连接至第一滑槽111,铰接剪叉32下端的一侧铰接至底座11、另一侧铰接至第一滑块31,铰接剪叉32的上端一侧铰接至支撑台33的下端,另一端通过销轴可滑动地连接至限位滑槽331,第一滑槽111内可转动地连接有第一螺纹杆113,第一螺纹杆113螺纹连接至第一滑块31,底座11固定连接有第二电机22,第二电机22的输出轴传动连接至第一螺纹杆113,支撑台33上设置有躺椅4。
60.使用时,训练者躺卧在躺板41上,调节压力传感器43的位置,使压力传感器43位于训练者的肩部下方,训练者躺在躺椅4上,肩部抵靠在压力传感器43上,控制第二电机22带动第一螺纹杆113转动,第一螺纹杆113带动第一滑块31在第一滑槽111内滑动,第一滑块31带动铰接剪叉32的下端一侧移动,实现对躺椅4的高度调节,调节便于不同训练者使用锻炼装置5,躺板41提供支撑力,防止训练者胯部下垂,脚垫42用于防止训练者脚部的支撑,防止滑动,当训练者训练时,当两个压力传感器43接收到的压力差值超出预设阈值、或者单个压力传感器43接收到的压力波动范围超出预设阈值时,控制器接收信号判定训练者姿势不标准,发出信号至蜂鸣器对训练者提供提醒,便于训练者保持腰背部挺直,使训练部位以手肘为主,提升训练效果;
61.训练者手持握把54,拉动握把54带动套板51在支撑块53上滑动,套板51拉动第一拉绳57,第一拉绳57带动配重装置6,通过调节配重装置6的配重,使训练者能够调节训练配重,用来适应不同恢复期的训练要求,提高适应性;
62.训练时小臂贴靠在臂挡52上,保证小臂和大臂的活动范围稳定在一平面内,提升训练效果。
63.具体实施例2:
64.在实施例1中,由于,因此在实施例1的基础上,由于不同身高及体型的训练者需要的躺椅4的角度和躺椅4与锻炼装置5的距离也不同,为便于躺椅4调节角度和躺椅4与锻炼装置5的距离,如图3至图5所示,本实施例中躺椅4上通过调位装置7连接至支撑台33,调位装置7包括第三螺纹杆76、第四螺纹杆77和转套79,支撑台33开设有第三滑槽332,第三滑槽332可转动的连接有第三螺纹杆76的一端,第三螺纹杆76远离支撑台33的一端可转动地连接有转套79,转套79的另一端可转动地连接有第四螺纹杆77,第四螺纹杆77的另一端可转
动地连接至第三滑槽332的侧壁,第三螺纹杆76上螺纹连接有第三滑块761,第三滑块761可滑动地连接至第三滑槽332,第三滑块761铰接有第一铰接杆,第一铰接杆的另一端铰接至躺椅4的下端,第四螺纹杆77上螺纹连接有第四滑块771,第四滑块771可滑动地连接至第三滑槽332,第四滑块771铰接至躺椅4的下端,支撑台33固定连接有第三电机23;
65.调位装置7还包括切换装置,第三电机23传动连接至切换装置,切换装置至少包括第一工作状态和第二工作状态:
66.当切换装置处于第一工作状态时,切换装置传动连接至第三螺纹杆76;
67.当切换装置处于第二工作状态时,切换装置传动连接至第三螺纹杆76和第四螺纹杆77。
68.使用时,当需要调节躺板41角度时,训练者将切换装置的工作状态切换至第一工作状态,启动第三电机23,第三电机23带动第三螺纹杆76转动,第三螺纹杆76带动第三滑块761沿第三滑槽332滑动,第三滑块761带动第一铰接杆推动躺板41,改变躺板41与支撑台33的角度;
69.当需要调节躺椅4与锻炼装置5的距离时,训练者将切换装置的工作状态切换至第二工作状态,启动第三电机23,第三电机23带动第三螺纹杆76和第四螺纹杆77同步转动,第三螺纹杆76带动第三滑块761沿第三滑槽332滑动,第四螺纹杆77带动第四滑块771沿第三滑槽332滑动,第三滑块761和第四滑块771的同步移动带动躺板41改变躺板41与支撑台33的距离,便于适应不同身高及体型的训练者的使用。
70.具体实施例3:
71.在实施例2中,由于切换装置处于第一工作状态时,第四螺纹杆77相对第三螺纹杆76容易发生转动,为保证切换装置工作的稳定性,因此在实施例2的基础上,如图3至图5所示,本实施例中切换装置还包括传动杆75,第三螺纹杆76内部开设有第一滑孔,传动杆75套接至第一滑孔,第三螺纹杆76靠近转套79的一端开设有第一传动腔762,第一传动腔762开设有花键槽,第四螺纹杆77靠近转套79的一端开设有第二传动腔772,第二传动腔772开设有花键槽,传动杆75固定连接有传动块752,传动块752开设有花键,花键可滑动地连接至花键槽;
72.传动块752至少包括第三工作状态和第四工作状态:
73.当传动块752位于第三工作状态时,花键完全位于第一传动腔762的花键槽,花键完全脱离第二传动腔772的花键槽;
74.当传动块752位于第四工作状态时,花键部分位于第一传动腔762的花键槽,花键另一部分位于第二传动腔772的花键槽;
75.传动杆75的一端贯穿至外界,并通过花键传动连接有第一传动块752,第一传动块752可转动地连接至支撑台33,第三电机23传动连接至第一传动块752;
76.第一传动块752固定连接有第一带轮,第三电机23的输出轴传动连接有第二带轮,第一带轮与第二带轮通过皮带相互传动连接;
77.调位装置7还包括操作装置,操作装置包括固定块71,滑动块72、滑动杆721和拨叉74,固定块71固定连接至支撑台33的一侧,固定块71开设有滑动槽,滑动槽可滑动地连接有滑动块72,滑动块72固定连接有滑动杆721,滑动杆721穿过固定块71,滑动杆721可滑动地连接至固定块71,传动杆75的一端固定连接有拨块751,滑动杆721远离滑动块72的一端固
定连接有拨叉74,滑动块72的上端固定连接有拨杆73,拨叉74卡接至拨块751,操作装置用于切换传动块752的工作状态;
78.调位装置7还包括卡接槽78和转杆754,第四螺纹杆77开设有第二滑孔,第二滑孔套接有转杆754,转杆754靠近传动块752的一端可转动地连接至传动块752,转杆754远离传动块752的一端贯穿至外界并固定连接有卡接头753,卡接槽78套接至转杆754,卡接槽78固定连接至支撑台33,卡接槽78对应卡接头753设置。
79.使用时,当需要调节躺椅4与锻炼装置5的距离时,拨动拨杆73,拨杆73带动滑动块72滑动,滑动块72通过滑动杆721带动拨叉74移动,拨叉74带动拨块751从而带动传动杆75移动,传动块752进入第四工作状态,启动第三电机23,第三电机23通过第一带轮和第二带轮带动传动杆75转动,传动杆75带动第三螺纹杆76和第四螺纹杆77同步转动,此时传动块752带动转杆754移动,转杆754带动卡接头753离开卡接槽78,此时第四螺纹杆77能够转动,第三螺纹杆76带动第三滑块761沿第三滑槽332滑动,第四螺纹杆77带动第四滑块771沿第三滑槽332滑动,第三滑块761和第四滑块771的同步移动带动躺板41改变躺板41与支撑台33的距离,便于适应不同身高及体型的训练者的使用;
80.当需要调节躺板41角度时,拨动拨杆73,拨杆73带动滑动块72滑动,滑动块72通过滑动杆721带动拨叉74移动,拨叉74带动拨块751从而带动传动杆75移动,传动块752进入第三工作状态,启动第三电机23,第三电机23通过第一带轮和第二带轮带动传动杆75转动,传动杆75带动第三螺纹杆76转动,此时传动块752带动转杆754移动,转杆754带动卡接头753与卡接槽78卡合,此时第四螺纹杆77相对支撑台33固定,第三电机23带动第三螺纹杆76转动,第三螺纹杆76带动第三滑块761沿第三滑槽332滑动,第三滑块761带动第一铰接杆推动躺板41,改变躺板41与支撑台33的角度。
81.具体实施例4:
82.在实施例2中,由于训练者体型不同,两臂之间的距离不同,为能够对应训练者双臂间距不同进行调整,因此在实施例1的基础上,如图3至图5所示,本实施例中底座11开设有第二滑槽112,配重装置6可滑动地连接至第二滑槽112,第二滑槽112可转动的连接有第二螺纹114杆,第二螺纹114杆为双向螺杆,两个配重装置6分别螺纹连接至第二螺纹114杆旋向相反的两侧,底座11固定连接有第一电机21,第一电机21传动连接至第二螺纹114杆;
83.第一支撑杆13为双向螺杆,两个支撑块53分别螺纹连接至第一支撑杆13旋向相反的两侧,第一电机21传动连接至第一支撑杆13;
84.第一支撑杆13的一端固定连接有第一带轮,第二螺纹114杆的一端固定连接有第二带轮,第一带轮和第二带轮通过皮带传动连接,第一支撑杆13与第二螺纹114杆的联动分别带动配重装置6与训练装置对应移动。
85.使用时,启动第一电机21,第一电机21带动第二螺纹114杆转动,通过第一带轮和第二带轮带动第一支撑杆13转动,第一支撑杆13与第二螺纹114杆均为双向螺杆,带动支撑块53移动,实现装置能够对应训练者双臂间距的不同进行调整,第二滑块61的移动与支撑块53移动同步,使第一拉绳57的受力角度趋于一致,使训练配重更加稳定。
86.具体实施例5:
87.在实施例4中,由于训练者肘部活动不便,训练者对配重的调节十分不便,为便于训练者训练时能够方便的调节配重,因此在实施例4的基础上,如图3至图5所示,本实施例
中配重装置6包括第二滑块61、限位角板62、配重块63和限位滑块64,第二滑块61螺纹连接至第二螺纹114杆,第二滑块61的上端固定连接有限位角板62,第二滑块61的上端固定连接有限位框611,限位框611内可滑动地连接有限位滑块64,若干配重块63可滑动地连接至限位角板62,第一拉绳57固定连接至限位滑块64,限位滑块64用于卡接配重块63。
88.限位角板62与配重块63接触一侧可转动地连接有多个滚子621,滚子621与配重块63接触。
89.限位滑块64内部开设有容纳槽641,容纳槽641内通过转轴可转动的连接有第一齿轮65和第二齿轮66,转轴可转动地限位滑块64,第一齿轮65与第二齿轮66啮合,限位滑块64开设有让位槽642,配重块63固定连接有组装齿条632,任意两个组装齿条632拼接可保持齿条连续,第一齿轮65与第二齿轮66分别通过让位槽642啮合至组装齿条632,第一齿轮65开设有棘轮槽651,转轴设置有止动块652,止动块652用于限制第一齿轮65的转动方向,容纳槽641可滑动地连接有配合齿条69,转轴开设有配合齿槽,配合齿条69与配合齿槽啮合,配合齿条69的一端固定连接有第三拉绳59,第三拉绳59套接有第二弹簧691,第二弹簧691的一端固定连接至配合齿条69、另一端固定连接至容纳槽641的内侧壁;
90.锻炼装置5还包括第二抠块542,第二抠块542可滑动地连接至握把54,第三拉绳59远离配合齿条69的一端架设在导向辊55上并固定连接至第二抠块542。
91.进行配重调节时,训练者拉动第二抠块542,第二抠块542带动第三拉绳59移动,第三拉绳59带动配合齿条69移动,配合齿条69带动转轴转动,转轴带动止动块652转动,止动块652通过棘轮槽651带动第一齿轮65转动,第一齿轮65带动第二齿轮66转动,使第一齿轮65和第二齿轮66在组装齿条632上同方向移动,带动限位滑块64移动,从而改变限位滑块64与配重块63的啮合位置,改变配重,松开第二抠块542,在第二弹簧691的作用力下,配合齿条69复位,配合齿条69带动转轴转动,转轴带动止动块652转动,止动块652复位,拉动推板,配重块63在重力作用下带动第一齿轮65反转,在止动块652作用下限制第一齿轮65转动,配合齿条69在行程限位的限制下克服配重块63的重力通过限位滑块64带动配重块63移动,滚子621减少配重块63沿限位框611移动,实现训练配重的调节。
92.具体实施例6:
93.在实施例5中,由于不便于限位滑块64的反向移动,为便于限位滑块64的快速复位,因此在实施例5的基础上,如图3至图5所示,本实施例中棘轮槽651的一端开设有通槽,转轴通过花键可滑动地连接有止动块652,容纳槽641可滑动地连接有楔形块68,止动块652开设有楔形面,楔形块68与楔形面配合,楔形块68的一端固定连接有第二拉绳58,第二拉绳58套接有第一弹簧681,第一弹簧681的一端固定连接至楔形块68、另一端固定连接至容纳槽641的内侧壁,止动块652的一端固定连接有复位弹簧,复位弹簧的另一端固定连接至第一齿轮65;
94.锻炼装置5还包括第一抠块541,第一抠块541可滑动地连接至握把54,第二拉绳58远离楔形块68的一端架设在导向辊55上并固定连接至第一抠块541;
95.第一齿轮65至少包括第一工作状态和第二工作状态:
96.当第一齿轮65处于第一工作状态时,第一抠块541位于握把54靠近滑板的一端,楔形块68一端与止动块652接触,止动块652与棘轮槽651配合,第一齿轮65单向转动;
97.当第一齿轮65处于第二工作状态时,第一抠块541位于握把54远离滑板的一端,楔
形块68另一端与止动块652接触,止动块652与通槽配合,第一齿轮65可双向转动。
98.容纳槽641内可转动地连接有第三齿轮67,第一齿轮65通过皮带驱动连接至第三齿轮67,配重块63的下端开设有定位槽631,限位滑块64对应定位槽631位置的两侧开设有定位通槽,两个定位通槽分别可滑动地连接有第一定位块671和第二定位块672,第一定位块671和第二定位块672均固定连接有定位齿条,两个定位齿条分别与第三齿轮67的两侧啮合,定位槽631的垂直高度大于第一定位块671和第二定位块672的垂直高度;
99.定位槽631的下端开设有定位销孔,第一定位块671和第二定位块672对应定位销孔的位置固定连接有定位销轴;
100.支撑块53上开设有第二限位槽56,第一拉绳57、第二拉绳58和第三拉绳59均架设在第二限位槽56內。
101.使用时,需要限位滑块64快速复位时,训练者拉动第一抠块541,第一抠块541带动第二拉绳58移动,第二拉绳58带动楔形块68移动,在复位弹簧的作用下推动止动块652离开棘轮槽651,并使止动块652进入通槽,令第一齿轮65进入第二工作状态,此时拉动滑板通过第一拉绳57带动限位滑块64移动并与配重块63啮合,松开第一抠块541,在第一弹簧681的作用下,楔形块68复位并克服复位弹簧的弹力带动止动块652从通槽进入棘轮槽651,另第一齿轮65进入第一工作状态;
102.进行配重调节时,训练者拉动第二抠块542,带动转轴转动,转轴带动第三齿轮67转动,带动第一定位块671和第二定位块672移动,此时定位销轴脱离定位销孔,解除第一定位块671和第二定位块672对配重块63的连接,第三齿轮67带动第一定位块671和第二定位块672移动,使限位滑块64能够实现训练配重的调节,
103.训练时拉动第一拉绳57带动限位滑块64上升,带动第一定位块671和第二定位块672上升,当第一定位块671和第二定位块672接触到定位槽631的底部带动配重块63上升,此时定位销轴进入定位销孔,此时第三齿轮67无法带动第一定位块671和第二定位块672移动,转轴与第三齿轮67联动,即无法拉动第二抠块542,训练时防止误触第二抠块542,使配重块63意外脱落发生危险。
104.以上公开的仅为本发明的几个具体实施例,但是,本发明实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。