1.本实用新型涉及一种包装盒加工设备,尤其涉及一种用于组装包装盒内底座的全自动组装系统。
背景技术:
2.包装盒应用非常广泛,很多包装盒为了满足应用需求,需要在包装盒内加装一个用来支撑内部产品的内底座,比如瓶装酒包装盒,经常需要在做好的包装盒内的底部粘贴安装一个用于支撑瓶装酒的内底座,一方面可以更好地对瓶装酒进行限位,另一方面也可以增加承重量。
3.在包装盒内安装内底座的传统方式是采用人工操作,即操作人员现在包装盒的内底部上打胶,然后将内底座置于包装盒内贴紧压实,这种方式不但速度慢、效率低,而且缺乏可控性,难以与整个生产线配合形成自动化系统,不利于包装盒的智能化、自动化、规模化生产。
技术实现要素:
4.本实用新型的目的就在于为了解决上述问题而提供一种组装效率显著提高的用于组装包装盒内底座的全自动组装系统。
5.本实用新型通过以下技术方案来实现上述目的:
6.一种用于组装包装盒内底座的全自动组装系统,包括机架和安装于所述机架上的包装盒输送带、分盒接近传感器、分盒气缸、打胶接近传感器、打胶气缸、自动打胶枪、组装气缸、自动机械臂、内底座输送带、控制器,设横向的所述包装盒输送带的运行方向为由前向后的方向,所述内底座输送带安装于所述包装盒输送带的上方,所述自动机械臂安装于所述包装盒输送带的上方并靠近所述内底座输送带的一端且用于将所述内底座输送带上的内底座移动至包装盒内的底部,所述组装气缸位于所述自动机械臂的下方并用于对该位置的所述包装盒进行临时定位,所述自动打胶枪位于所述自动机械臂的前方且位于所述包装盒输送带的上方,所述打胶气缸位于所述自动打胶枪的下方并用于对该位置的所述包装盒进行临时定位,所述分盒气缸位于所述打胶气缸的前方并用于对该位置的所述包装盒进行临时定位,所述打胶接近传感器位于所述分盒气缸与所述打胶气缸之间并用于检测该位置的所述包装盒,所述分盒接近传感器位于所述分盒气缸的前方并用于检测该位置的所述包装盒,所述分盒接近传感器的信号输出端和所述打胶接近传感器的信号输出端分别与所述控制器的信号输入端对应连接,所述分盒气缸的控制输入端、所述打胶气缸的控制输入端、所述自动打胶枪的控制输入端、所述组装气缸的控制输入端和所述自动机械臂的控制输入端分别与所述控制器的控制输出端对应连接。
7.上述结构中,包装盒输送带是用于输送包装盒的输送带;分盒接近传感器是用于检测包装盒并将检测到的包装盒定位以达到前后包装盒分开目的的传感器;分盒气缸是用于夹持包装盒以达到前后包装盒分开目的的驱动气缸;打胶接近传感器是用于检测包装盒
并将检测到的包装盒定位以达到向盒内底部打胶目的的传感器;打胶气缸是用于夹持包装盒以达到向盒内底部打胶目的的驱动气缸;自动打胶枪是一种能够实现自动化打胶功能的打胶枪,在控制器控制下完成定时喷胶功能,是一种现有成熟产品;组装气缸是用于夹持包装盒以达到将内底座安装在包装盒内底部目的的驱动气缸;自动机械臂是一种能够实现自动化移动功能的类似于手臂一样的智能机械,也可以称为机械手,根据需要可以设置三轴(即相互垂直的x、y、z轴)运动机构、两轴(即相互垂直的x、y轴)运动机构、单向直线往复运动机构、旋转机构、伸缩机构等,是一种能够由控制器控制的多向运动机械,其具体驱动部件、传动部件等都是根据实际需要而定,是一种成熟技术,在本技术方案中,自动机械臂需要能够实现横向移动和竖向移动功能,也可以增加旋转移动功能;内底座输送带是用于输送内底座的输送带;控制器用于将各种电子信号进行整合计算并控制各电子部件动作,实现自动化控制,采用常规控制器即可。
8.作为优选,为了更加稳定可靠地完成内底座的组装并实现包装盒的自动流动,所述包装盒输送带的宽度不小于所述包装盒宽度的两倍,所述包装盒输送带的一侧安装有第一导向杆、所述包装盒输送带的中部上方安装有第二导向杆,所述机架上同时位于所述自动机械臂的下方、所述组装气缸的后方、所述包装盒输送带的上方的位置安装有包装盒挡板,所述组装气缸通过安装支架安装在所述机架上且位于靠近所述第二导向杆的位置,所述组装气缸的推杆与用于夹持所述包装盒的竖向的组装推板连接,所述组装气缸的推杆与横向之间具有30-60
°
的夹角使所述组装气缸的推杆收回时所述组装推板向上移动后与所述包装盒输送带之间的距离大于所述包装盒的高度,靠近所述第一导向杆且与所述组装气缸对应的位置安装有推盒气缸,所述推盒气缸的推杆与用于支撑和推动所述包装盒的竖向的推盒推板连接。
9.作为优选,为了对包装盒进行导向且便于安装各气缸,所述分盒气缸为两个且分别位于所述第一导向杆的外侧和所述第二导向杆远离所述第一导向杆的一侧,所述打胶气缸为两个且分别位于所述第一导向杆的外侧和所述第二导向杆远离所述第一导向杆的一侧,位于所述包装盒输送带上方的所述分盒气缸和所述打胶气缸通过横向的气缸安装板安装在所述机架上。
10.作为优选,为了便于安装各接近传感器,所述分盒接近传感器和所述打胶接近传感器均安装于所述第一导向杆上。
11.作为优选,为了实现内底座的夹持、移动和安装,所述自动机械臂上安装有能够横向和竖向移动的移动座,所述移动座能够置于所述包装盒内,所述移动座的下方安装有用于吸附所述内底座的吸盘,所述吸盘通过气管与气源连接,所述吸盘的控制输入端与所述控制器的控制输出端对应连接。吸盘用于夹持和释放内底座,其作用原理是利用对与吸盘连接的气管的气源控制,利用真空吸附原理实现对内底座盒的吸取夹持和释放功能,其控制方式一般是在气管上安装电磁阀,也可以是直接控制气源启停,即吸盘的控制输入端为其连接气管上的电磁阀的控制输入端或气源的控制输入端,具体根据实际需要而定。
12.作为优选,为了便于输送内底座并确保被挡住后处于固定位置以利于被准确夹持,所述内底座输送带为相互平行的两条,两条所述内底座输送带之间的距离小于所述内底座的总宽度且大于所述内底座的凸起部分的宽度,所述内底座输送带靠近所述自动机械臂的一端上方设有内底座挡板,所述内底座挡板安装于所述机架上。
13.作为优选,为了稳定可靠地输送内底座,两条所述内底座输送带的外侧分别安装有导向条。
14.本实用新型的有益效果在于:
15.本实用新型通过设计相互配合的分盒接近传感器、分盒气缸、打胶接近传感器、打胶气缸、自动打胶枪、组装气缸和自动机械臂,实现自动打胶和自动组装内底座的功能,整个检测过程均由机械控制,不依赖于工作人员的打胶和组装经验,提高了组装质量和产品合格率,最终显著提高了包装盒内底座组装的效率、精度和自动化程度;本实用新型所述用于组装包装盒内底座的全自动组装系统能够实现全程自动化控制,能够与整个生产线配合形成自动化系统,有利于包装盒的智能化、自动化、规模化生产。
附图说明
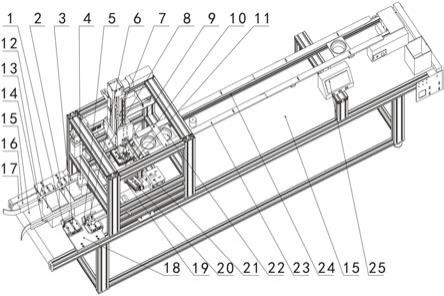
16.图1是本实用新型所述用于组装包装盒内底座的全自动组装系统的立体结构示意图。
具体实施方式
17.下面结合附图对本实用新型作进一步说明:
18.如图1所示,本实用新型所述用于组装包装盒内底座的全自动组装系统包括机架17和安装于机架17上的包装盒输送带15、分盒接近传感器13、分盒气缸3、打胶接近传感器2、打胶气缸6、自动打胶枪4、组装气缸20、自动机械臂7、内底座输送带24、控制器(图中未示),设横向的包装盒输送带15的运行方向为由前向后的方向,内底座输送带24安装于包装盒输送带15的上方,自动机械臂7安装于包装盒输送带15的上方并靠近内底座输送带24的一端且用于将内底座输送带24上的内底座22移动至包装盒12内的底部,组装气缸20位于自动机械臂7的下方并用于对该位置的包装盒12进行临时定位,自动打胶枪4位于自动机械臂7的前方且位于包装盒输送带15的上方,打胶气缸6位于自动打胶枪4的下方并用于对该位置的包装盒12进行临时定位,打胶气缸6的推杆与打胶推板5连接,分盒气缸3位于打胶气缸6的前方并用于对该位置的包装盒12进行临时定位,分盒气缸3的推杆与分盒推板1连接,打胶接近传感器2位于分盒气缸3与打胶气缸6之间并用于检测该位置的包装盒12,分盒接近传感器13位于分盒气缸3的前方并用于检测该位置的包装盒12,分盒接近传感器13的信号输出端和打胶接近传感器2的信号输出端分别与所述控制器的信号输入端对应连接,分盒气缸3的控制输入端、打胶气缸6的控制输入端、自动打胶枪4的控制输入端、组装气缸20的控制输入端和自动机械臂7的控制输入端分别与所述控制器的控制输出端对应连接。
19.如图1所示,本实用新型还公开了以下多种更加优化的具体结构,根据实际需要可以将上述结构与下述一种或多种结构进行叠加组合形成更加优化的技术方案。
20.为了更加稳定可靠地完成内底座22的组装并实现包装盒12的自动流动,包装盒输送带15的宽度不小于包装盒12宽度的两倍,包装盒输送带15的一侧安装有第一导向杆16、包装盒输送带15的中部上方安装有第二导向杆14,机架17上同时位于自动机械臂7的下方、组装气缸20的后方、包装盒输送带15的上方的位置安装有包装盒挡板11,组装气缸20通过安装支架21安装在机架17上且位于靠近第二导向杆14的位置,组装气缸20的推杆与用于夹持包装盒12的竖向的组装推板19连接,组装气缸20的推杆与横向之间具有30-60
°
的夹角使
组装气缸20的推杆收回时组装推板19向上移动后与包装盒输送带15之间的距离大于包装盒12的高度,靠近第一导向杆16且与组装气缸20对应的位置安装有推盒气缸8,推盒气缸8的推杆与用于支撑和推动包装盒12的竖向的推盒推板(图中不可视)连接。
21.为了对包装盒12进行导向且便于安装各气缸,分盒气缸3为两个且分别位于第一导向杆16的外侧和第二导向杆14远离第一导向杆16的一侧,打胶气缸6为两个且分别位于第一导向杆16的外侧和第二导向杆14远离第一导向杆16的一侧,位于包装盒输送带15上方的分盒气缸3和打胶气缸6通过横向的气缸安装板18安装在机架17上。
22.为了便于安装各接近传感器,分盒接近传感器13和打胶接近传感器2均安装于第一导向杆16上。
23.为了实现内底座22的夹持、移动和安装,自动机械臂7上安装有能够横向和竖向移动的移动座9,移动座9能够置于包装盒12内,移动座9的下方安装有用于吸附内底座22的吸盘10,吸盘10通过气管与气源(图中未示)连接,吸盘10的控制输入端与所述控制器的控制输出端对应连接。
24.为了便于输送内底座22并确保被挡住后处于固定位置以利于被准确夹持,内底座输送带24为相互平行的两条,两条内底座输送带24之间的距离小于内底座22的总宽度且大于内底座22的凸起部分的宽度,内底座输送带24靠近自动机械臂7的一端上方设有内底座挡板(图中未标记),所述内底座挡板安装于机架17上。
25.为了稳定可靠地输送内底座22,两条内底座输送带24的外侧分别安装有导向条23。
26.图1中还示出了控制面板25,所述控制器置于控制面板内。
27.如图1所示,使用时,将待组装的包装盒12置于包装盒输送带15上,第一个包装盒12经过分盒接近传感器13时被检测,控制器计数但不发出控制指令,第二个包装盒12经过分盒接近传感器13时被检测,控制器控制分盒气缸3动作,将第二个包装盒12夹持定位,同时,第一个包装盒12经过打胶接近传感器2时被检测,控制器控制打胶气缸6动作,将第一个包装盒12夹持定位,然后自动打胶枪4动作,向对应的包装盒12内喷胶,打胶完成后,分盒气缸3和打胶气缸均动作,释放对应的包装盒12,第一个包装盒12移动到自动机械臂7的下方被包装盒挡板11挡住,接着组装气缸20动作,将第一个包装盒12夹持定位,然后自动机械臂7动作,移动座9向上移动,再向靠近内底座22的方向横向移动,再向下移动,然后吸盘10的真空气源开启产生吸力,吸住一个内底座22,然后向上移动,再向靠近待组装的第一个包装盒12的方向横向移动,再向下移动,直到内底座22被粘结在第一个包装盒12内的底部,然后移动座9向上移动复位,然后推盒气缸8启动,带动推盒推板推动组装内底座22之后的第一个包装盒12向靠近组装气缸20的方向移动,将第一个包装盒12推到靠近包装盒输送带15的另一侧后,第一个包装盒12避开包装盒挡板11并被包装盒输送带15输送至下一工位,完成组装内底座22的整个流程;与此同时,第二个包装盒12重复上述第一个包装盒12的流程,第三个包装盒12重复上述第二个包装盒12的流程,如此循环,完成所有包装盒12与内底座22的组装流程。
28.上述实施例只是本实用新型的较佳实施例,并不是对本实用新型技术方案的限制,只要是不经过创造性劳动即可在上述实施例的基础上实现的技术方案,均应视为落入本实用新型专利的权利保护范围内。