1.本发明属于采光装置技术领域,尤其涉及一种大型建筑智能采光装置。
背景技术:
2.将影响人体冷热感觉的各种因素所构成的环境称为热环境。影响建筑室内热环境的因素包括:室内空气温度、室内空气湿度、气流速度、热辐射。建筑采光决定了建筑外围护结构的热辐射强度,并影响着室内采光情况。
3.建筑物中采光装置的结构大小、采光时间、采光强度、照度、投射角度等因素对建筑物的热辐照有直接的影响,而热辐照值的改变,对室内热环境的改变具有很大的影响;研究建筑物的采光结构,对于建筑室内热环境的改善,具有重要意义。
4.目前大型建筑智能采光装置为了获得良好的光照环境,同时兼顾节约能源,会在建筑外围结构上布置各种形式的采光口,将外部光线引导至室内,可以扩大光照范围和延长光照时长,特别是在建筑群较为密集的位置能够起到很好的作用。
5.但现有的大型建筑智能采光装置中导光板一般是裸露在外侧的,有的大型建筑智能采光装置利用气缸带动清理件单向移动,清理件对采光件进行清理,但是清理效果一般,长时间使用后表面仍然会附着较多灰尘,这样会影响采光件对光线的采集,导光效果低下,从而会影响人们的生活,为此我们提出一种大型建筑智能采光装置。
技术实现要素:
6.本发明实施例的目的在于提供一种大型建筑智能采光装置,旨在解决上述背景技术中提出的问题。
7.为实现上述目的,本发明提供如下技术方案:一种大型建筑智能采光装置,包括遮挡件和固定座,还包括:智能调节机构,与固定座连接,用于根据光照强度对遮挡件与固定座之间形成的角度大小进行调节;清理机构,与固定座连接,所述清理机构包括:驱动件一,驱动件一的末端设有移动座,移动座内滑动连接有移动组件,移动组件与移动座之间设有弹性件二,移动组件的末端设有清理件,驱动件一带动移动座移动,移动座通过带动清理件纵向移动的方式对采光件进行纵向清理;驱动件二,所述驱动件二的输出端连接有主动轮,主动轮的侧壁啮合连接有传动轮和从动轮二,传动轮的一侧啮合连接有从动轮一,从动轮一的中心轴末端固定连接有转动组件,转动组件内滑动连接有活动组件,活动组件的末端与滑座之间设有弹性件一,从动轮二的中心轴末端固定连接有凸轮,凸轮与活动组件活动抵接,所述驱动件二通过主动轮带动传动轮和从动轮二转动,传动轮带动从动轮一转动,从动轮一通过转动组件带动活动组件转动,从动轮二带动凸轮转动,凸轮配合弹性件一带动活动组件往复移动,活动组件配合弹性件二带动移动组件往复移动,移动组件通过带动清理件往复移动的方式对采光件进
行横向清理。
8.进一步的,所述移动组件包括移动件二,所述移动件二与移动座滑动连接,移动件二的一端设有受力件,移动件二的另一端与清理件固定连接,移动件与移动座之间设有弹性件二。
9.进一步的,所述活动组件包括活动件,所述活动件与受力件活动抵接,所述活动件的侧壁固定连接有抵接头,所述抵接头与凸轮活动抵接,所述活动件的末端固定连接有移动件一,移动件一的末端与滑座之间设有弹性件一。
10.进一步的,所述转动组件包括转动件一和滑座,所述转动件一与从动轮一的中心轴末端固定连接,所述转动件上固定连接有滑座,滑座与活动件滑动连接。
11.进一步的,所述智能调节机构包括感应器、控制器、驱动件三和对称设置的连接座,所述感应器设于采光件内,所述感应器与控制器通过电信号连接,所述控制器用于控制驱动件三。
12.进一步的,所述连接座与固定座固定连接,所述连接座内开设有移动槽一和移动槽二,移动槽一与移动槽二相连通,对称设置的连接座之间连接有连接件三。
13.进一步的,所述驱动件三的输出端连接有转动件二,所述转动件二与连接座螺接,所述转动件二的末端连接有连接件一,所述连接件一的末端连接有连接件二,所述连接件二的末端活动连接有支撑座,所述支撑座的顶部与遮挡件固定连接,所述支撑座的侧壁固定连接有固定头一和固定头二,所述固定头一与移动槽一和移动槽二滑动连接,固定头二与移动槽一滑动连接。
14.与现有技术相比,本发明的有益效果是:1.该大型建筑智能采光装置,通过设置驱动件三,配合感应器、控制器、转动件二和支撑座等组件,当光照强度小于预定值时,控制器控制驱动件三顺时针转动,驱动件三带动转动件二顺时针转动,转动件二通过连接件一带动连接件二转动,连接件二带动支撑座移动,直至固定头二与移动槽一的末端接触,支撑座停止移动,配合连接件一和连接件二,支撑座带动遮挡件逆时针转动,当光照强度等于预定值时停止转动驱动件三;当光照强度大于预定值时,与上述操作相反,将装置智能化,使用较为方便;2.该大型建筑智能采光装置,通过设置驱动件一和驱动件二,配合移动座、主动轮、从动轮一和凸轮等组件,驱动件一带动移动座移动,移动座通过带动清理件纵向移动的方式对采光件进行纵向清理;启动驱动件二,驱动件二通过主动轮带动传动轮和从动轮二转动,传动轮带动从动轮一转动,从动轮一通过转动组件带动活动组件转动,从动轮二带动凸轮转动,凸轮配合弹性件一带动活动组件往复移动,活动组件配合弹性件二带动移动组件往复移动,移动组件通过带动清理件往复移动的方式对采光件进行横向清理,清理效果较好,且能够同时对两个采光件进行清理。
附图说明
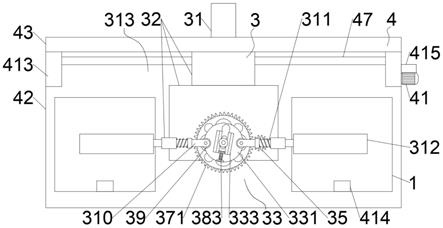
15.图1为大型建筑智能采光装置的结构示意图。
16.图2为大型建筑智能采光装置中从动轮二与凸轮连接关系的结构示意图。
17.图3为大型建筑智能采光装置中活动组件的立体结构示意图。
18.图4为大型建筑智能采光装置中主动轮、传动轮和从动轮一的连接关系结构示意
图。
19.图5为大型建筑智能采光装置中智能调节机构的部分侧视结构示意图。
20.图6为大型建筑智能采光装置中智能调节机构的部分剖视结构示意图。
21.图中:1-采光件,3-清理机构,31-驱动件一,32-移动座,33-转动组件,331-转动件一,332-从动轮一,333-滑座,34-驱动件二,35-主动轮,36-传动轮,371-从动轮二,372-凸轮,38-活动组件,381-活动件,382-抵接头,383-弹性件一,384-移动件一,39-受力件,310-移动件二,311-弹性件二,312-清理件,313-移动组件,4-智能调节机构,41-驱动件三,42-遮挡件,43-固定座,44-转动件二,45-连接件一,46-连接件二,47-连接件三,48-移动槽一,49-移动槽二,410-支撑座,411-固定头一,412-固定头二,413-连接座,414-感应器,415-控制器。
具体实施方式
22.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
23.以下结合具体实施例对本发明的具体实现进行详细描述。
24.如图1-6所示,为本发明一个实施例提供的一种大型建筑智能采光装置,包括遮挡件42和固定座43,还包括:智能调节机构4,与固定座43连接,用于根据光照强度对遮挡件42与固定座43之间形成的角度大小进行调节;清理机构3,与固定座43连接,所述清理机构3包括:驱动件一31,驱动件一31的末端设有移动座32,移动座32内滑动连接有移动组件313,移动组件313与移动座32之间设有弹性件二311,移动组件313的末端设有清理件312,驱动件一31带动移动座32移动,移动座32通过带动清理件312纵向移动的方式对采光件1进行纵向清理;驱动件二34,所述驱动件二34的输出端连接有主动轮35,主动轮35的侧壁啮合连接有传动轮36和从动轮二371,传动轮36的一侧啮合连接有从动轮一332,从动轮一332的中心轴末端固定连接有转动组件33,转动组件33内滑动连接有活动组件38,活动组件38的末端与滑座333之间设有弹性件一383,从动轮二371的中心轴末端固定连接有凸轮372,凸轮372与活动组件38活动抵接,所述驱动件二34通过主动轮35带动传动轮36和从动轮二371转动,传动轮36带动从动轮一332转动,从动轮一332通过转动组件33带动活动组件38转动,从动轮二371带动凸轮372转动,凸轮372配合弹性件一383带动活动组件38往复移动,活动组件38配合弹性件二311带动移动组件313往复移动,移动组件313通过带动清理件312往复移动的方式对采光件1进行横向清理。
25.在本发明实施例中,优选的,采光件1和遮挡件42采用板,且采光件1对称设置,采光件1内设有导光管,驱动件一31采用气缸,驱动件二34采用电机,弹性件一383和弹性件二311采用弹簧,清理件312采用海绵或软布,主动轮35的侧壁厚度大于传动轮36和从动轮二371的侧壁厚度之和,因此主动轮35能够带动传动轮36和从动轮二371同时转动。具体的,驱动件一31带动移动座32移动,移动座32带动清理件312纵向移动,从而清理件312对采光件1
进行纵向清理;通过设置驱动件二34,配合主动轮3、传动轮36、从动轮二371和从动轮一332等组件,凸轮372配合弹性件一383带动活动组件38往复移动,活动组件38配合弹性件二311带动移动组件313往复移动,移动组件313带动清理件312往复移动,因此清理件312能够对采光件1进行横向清理。
26.如图1所示,作为本发明的一种优选实施例,所述移动组件313包括移动件二310,所述移动件二310与移动座32滑动连接,移动件二310的一端设有受力件39,移动件二310的另一端与清理件312固定连接,移动件310与移动座32之间设有弹性件二311。
27.在本发明实施例中,优选的,受力件39采用柱状块,移动组件313、弹性件二311和清理件312均为对称设置,具体的,当凸轮372的凸端与活动组件38接触时,活动组件38通过移动组件313使得清理件312移动,清理件312对采光件1进行清理,当凸轮372的平端与活动组件38接触时,活动组件38回归原位置,此时弹性件二311利用自身弹性带动清理件312回归原位置,因此活动件381配合弹性件二311带动清理件312往复移动,从而清理件312对采光件1进行横向清理。
28.如图1-3所示,作为本发明的一种优选实施例,所述活动组件38包括活动件381,所述活动件381与受力件39活动抵接,所述活动件381的侧壁固定连接有抵接头382,所述抵接头382与凸轮372活动抵接,所述活动件381的末端固定连接有移动件一384,移动件一384的末端与滑座333之间设有弹性件一383。
29.在本发明实施例中,优选的,活动件381采用板,移动件一384采用杆,弹性件一383采用弹簧。具体的,从动轮二371带动凸轮372转动,凸轮372的凸端与抵接头382接触时,活动件381向靠近受力件39的方向移动,凸轮372的平端与抵接头382接触时,弹性件一383利用自身弹性带动活动件381回归原位置,因此凸轮372配合弹性件一383带动活动件381往复移动。
30.如图1和图3所示,作为本发明的一种优选实施例,所述转动组件33包括转动件一331和滑座333,所述转动件一331与从动轮一332的中心轴末端固定连接,所述转动件331上固定连接有滑座333,滑座333与活动件381滑动连接。
31.在本发明实施例中,优选的,转动件一331采用转盘,活动件381内开设有限位槽,转动件一331的中心轴与限位槽滑动连接,能够对活动件381进行限位,避免发生意外。具体的,主动轮35通过传动轮36带动从动轮一332转动,从动轮一332带动转动件一331转动,转动件一331带动滑座333转动,滑座333带动活动件381转动。
32.如图1和图5所示,作为本发明的一种优选实施例,所述智能调节机构4包括感应器414、控制器415、驱动件三41和对称设置的连接座413,所述感应器414设于采光件1内,所述感应器414与控制器415通过电信号连接,所述控制器415用于控制驱动件三41。
33.在本发明实施例中,感应器414将检测得到的光照强度信号转化为电信号传递给控制器415,控制器415根据感应器414传递的信号判断光照强度;当光照强度小于预定值时,控制器415控制驱动件三41顺时针转动,智能调节机构4将遮挡件42与固定座43之间形成的角度调大,减小遮光件42对采光件1的遮挡,增大采光件1的进光量,从而增大光照强度;当光照强度大于预定值时,控制器415控制驱动件三41逆时针转动,智能调节机构4将遮挡件42与固定座43之间形成的角度调小,增大遮光件42对采光件1的遮挡,减小采光件1的进光量,从而减小光照强度。
34.如图1和图5所示,作为本发明的一种优选实施例,所述连接座413与固定座43固定连接,所述连接座413内开设有移动槽一48和移动槽二49,移动槽一48与移动槽二49相连通,对称设置的连接座413之间连接有连接件三47。
35.在本发明实施例中,优选的,移动槽一48呈竖直的“l”字槽,移动槽二49呈弧状。
36.如图1-6所示,作为本发明的一种优选实施例,所述驱动件三41的输出端连接有转动件二44,所述转动件二44与连接座413螺接,所述转动件二44的末端连接有连接件一45,所述连接件一45的末端连接有连接件二46,所述连接件二46的末端活动连接有支撑座410,所述支撑座410的顶部与遮挡件42固定连接,所述支撑座410的侧壁固定连接有固定头一411和固定头二412,所述固定头一411与移动槽一48和移动槽二49滑动连接,固定头二412与移动槽一48滑动连接。
37.在本发明实施例中,优选的,驱动件三41采用电机,转动件二44采用螺杆,连接件一45和连接件二46采用板或杆。具体的,当需要将遮挡件42与固定座43之间形成的角度调大时,驱动件三41带动转动件二44顺时针转动,转动件二44带动连接件一45转动,连接件一45带动连接件二46转动,连接件二46带动支撑座410移动,直至固定头二412与移动槽一48的末端接触,支撑座410停止移动,转动件二44继续转动,配合连接件一45和连接件二46,支撑座410带动遮挡件42逆时针转动,此时固定头一411在移动槽二49内滑动,直至遮挡件42转动至一定角度时(一定角度是指达到光照强度预定值时的角度),停止转动驱动件三41,转动件二44有自锁功能从而能够保持稳定;当需要将遮挡件42与固定座43之间形成的角度调小时,与上述操作相反,在此不多赘述。
38.本发明的工作原理是:该大型建筑智能采光装置,感应器414将检测得到的光照强度信号转化为电信号传递给控制器415,控制器415根据感应器414传递的信号判断光照强度;当光照强度小于预定值时,控制器415控制驱动件三41顺时针转动,驱动件三41带动转动件二44顺时针转动,转动件二44通过连接件一45带动连接件二46转动,连接件二46带动支撑座410移动,直至固定头二412与移动槽一48的末端接触,支撑座410停止移动,转动件二44继续转动,配合连接件一45和连接件二46,支撑座410带动遮挡件42逆时针转动,此时固定头一411在移动槽二49内滑动,当光照强度等于预定值时停止转动驱动件三41;当光照强度大于预定值时,与上述操作相反,在此不多赘述;夜晚时对采光件1进行清理,启动驱动件一31,驱动件一31带动移动座32移动,移动座32通过带动清理件312纵向移动的方式对采光件1进行纵向清理;启动驱动件二34,驱动件二34通过主动轮35带动传动轮36和从动轮二371转动,传动轮36带动从动轮一332转动,从动轮一332通过转动组件33带动活动组件38转动,从动轮二371带动凸轮372转动,凸轮372配合弹性件一383带动活动组件38往复移动,活动组件38配合弹性件二311带动移动组件313往复移动,移动组件313通过带动清理件312往复移动的方式对采光件1进行横向清理。
39.以上仅是本发明的优选实施方式,应当指出,对于本领域的技术人员来说,在不脱离本发明构思的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些均不会影响本发明实施的效果和专利的实用性。