1.本发明涉及消防器械技术领域,具体为一种高层建筑消防无人机。
背景技术:
2.随着社会的发展,建筑高度越来越高,越来越多的摩天大楼出现在城市中,高耸入云的大厦寄托着人美好梦想都的同时也带来了隐藏的危险——高楼火灾,高层建筑人员密度更大,火灾危险性更高,火灾损失更大,灭火难度高,在高层建筑灭火中常常采用消防无人机进行辅助灭火。
3.例如申请号:cn201680031596.9本发明涉及一种灭火用消防无人机,其构成为,当在住宅及建筑物、营造物等发生火灾时,可以在火灾初期迅速投入从而在初期扑灭火灾,与中央管制系统相连接,从而在远程以无人操作的形式实现操作。所述灭火用消防无人机包括:飞行部,其设置有螺旋桨部;防灾炮塔部,其用于喷射灭火剂;移动部,为了移动主体部而设置有多个移动部;防灾装置部,其具备用于喷射灭火剂、或者发射灭火弹、或者拯救生命的物品。
4.基于上述,现有的消防无人机承载能力有限,只能通过化学灭火剂进行辅助灭火,化学灭火剂只能扑灭明火,无法进行深度灭火,无法起到降温效果,但是主要灭火还要依靠消火栓进行灭火,现有消防无人机难以承受消火栓的反冲力,因此还主要依靠消防员进行灭火,在消防员灭火中有时需要对玻璃进行破碎后才能进行灭火,在破窗时容易引起轰然,造成人员伤亡;因此,不满足现有的需求,对此我们提出了一种高层建筑消防无人机。
技术实现要素:
5.本发明的目的在于提供一种高层建筑消防无人机,以解决上述背景技术中提出的现有的消防无人机承载能力有限,只能通过化学灭火剂进行辅助灭火,化学灭火剂只能扑灭明火,无法进行深度灭火,无法起到降温效果,但是主要灭火还要依靠消火栓进行灭火,现有消防无人机难以承受消火栓的反冲力,因此还主要依靠消防员进行灭火,在消防员灭火中有时需要对玻璃进行破碎后才能进行灭火,在破窗时容易引起轰然,造成人员伤亡的问题。
6.为实现上述目的,本发明提供如下技术方案:一种高层建筑消防无人机,包括消防无人机主体;所述消防无人机主体的底部内侧固定连接有一组行进驱动件;所述消防无人机主体的内部左侧转动连接有一组行进主动轴;所述消防无人机主体的右侧转动连接有一组行进从动轴;所述行进主动轴和行进从动轴的前后两侧外部均缠绕有一组行进传动链条;所述行进主动轴和行进从动轴的前后两侧外部均设置有一组行进履带。
7.优选的,所述消防无人机主体还包括有消防水枪、破碎锤头,消防无人机主体的顶部固定连接有一组消防水枪,消防水枪的顶部螺纹连接有一组破碎锤头。
8.优选的,所述行进驱动件还包括有行进驱动链轮,行进驱动件的转轴上同轴固定连接有一组行进驱动链轮,行进主动轴还包括有行进从动链轮,行进主动轴的中部同轴固
定连接有一组行进从动链轮,行进驱动链轮与行进从动链轮之间通过传动链条传动连接,行进驱动链轮与行进从动链轮之间共同构成传动链条传动机构。
9.优选的,所述行进主动轴还包括有左行进链轮,行进主动轴的中部前后均同轴固定连接有一组左行进链轮,行进从动轴还包括有右行进链轮,行进从动轴的中部前后均同轴固定连接有一组右行进链轮,左行进链轮和右行进链轮通过行进传动链条传动连接,左行进链轮、右行进链轮、行进传动链条之间共同构成传动链条传动机构。
10.优选的,所述行进主动轴还包括有左行进辊筒,行进主动轴的前后端面均同轴固定连接有一组左行进辊筒,行进从动轴还包括有右行进辊筒,行进从动轴的前后端面均同轴固定连接有一组右行进辊筒,左行进辊筒和右行进辊筒的外侧共同缠绕有一组行进履带。
11.优选的,同侧所述行进传动链条的链节外侧与行进履带固定连接。
12.优选的,所述行进履带还包括有吸附气嘴,行进履带的外侧设置有一组吸附气嘴,行进履带内部为囊式结构,吸附气嘴与行进履带的内腔相连通,吸附气嘴通过软管与真空泵相连接。
13.优选的,所述行进履带还包括有行进吸盘、吸附阀芯、复位弹簧,行进履带的外侧均匀排布固定连接有行进吸盘,每组行进吸盘的内部滑动连接有一组吸附阀芯,吸附阀芯的上部通过一组复位弹簧与行进履带弹性连接,消防无人机主体的内侧下部前后均固定连接有一组阀体开启驱动块,当吸附阀芯位于底部时,吸附阀芯的顶部与阀体开启驱动块底部压紧连接共同形成平面凸轮机构。
14.与现有技术相比,本发明的有益效果是:
15.本发明使用时,行进驱动件通过由行进驱动链轮与行进从动链轮之间共同构成的传动链条传动机构带动行进主动轴旋转,行进主动轴通过由左行进链轮、右行进链轮、行进传动链条之间共同构成的传动链条传动机构带动行进传动链条旋转,行进传动链条带动行进履带同步旋转,当行进吸盘转动到底部时,在由吸附阀芯与阀体开启驱动块共同形成的平面凸轮机构带动吸附阀芯往下滑动,将吸附阀芯与行进履带底部打开,使行进吸盘与行进履带内部接通,在真空泵的吸附作用下行进吸盘紧密的吸附在墙面上,同时实现了消防无人机主体的行进,吸附力强,可以在墙面上的行进,当行进到火灾位置的窗口时,可以通过破碎锤头对玻璃进行破碎然后通过消防水枪喷水进行灭火。
16.本发明实现了底部的行进吸盘对墙面的吸附和自动松开,实现在墙面上的行进动作,吸附力大,具有更大的承载能力,可以承受高压消防水枪的反冲力,实现了对高层建筑的喷水灭火,同时可以对玻璃进行破碎,保证喷水灭火进行,灭火能力强,可以完全替代消防员进行高空作业,有效防止由于轰然造成的人员伤亡。
附图说明
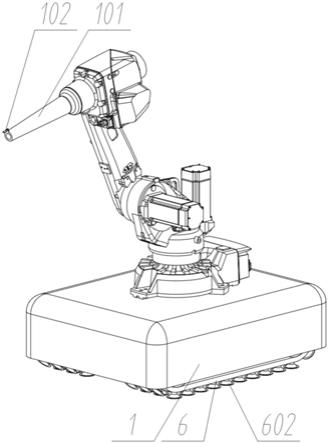
17.图1为本发明的轴侧结构示意图;
18.图2为本发明的破碎锤头轴侧结构示意图;
19.图3为本发明的内部轴侧结构示意图;
20.图4为本发明的行进驱动件安装轴侧结构示意图;
21.图5为本发明的行进主动轴传动轴侧结构示意图;
22.图6为本发明的行进履带轴侧结构示意图;
23.图7为本发明的行进履带剖视结构示意图;
24.图8为本发明的图7中a处局部放大结构示意图;
25.图9为本发明的行进吸盘等轴侧剖视结构示意图;
26.图中:1、消防无人机主体;101、消防水枪;102、破碎锤头;103、阀体开启驱动块;2、行进驱动件;201、行进驱动链轮;3、行进主动轴;301、行进从动链轮;302、左行进链轮;303、左行进辊筒;4、行进从动轴;401、右行进链轮;402、右行进辊筒;5、行进传动链条;6、行进履带;601、吸附气嘴;602、行进吸盘;603、吸附阀芯;604、复位弹簧。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
28.请参阅图1至图9,本发明提供的一种实施例:一种高层建筑消防无人机,包括消防无人机主体1;消防无人机主体1的底部内侧固定连接有一组行进驱动件2;消防无人机主体1的内部左侧转动连接有一组行进主动轴3;消防无人机主体1的右侧转动连接有一组行进从动轴4;行进主动轴3和行进从动轴4的前后两侧外部均缠绕有一组行进传动链条5;行进主动轴3和行进从动轴4的前后两侧外部均设置有一组行进履带6。
29.进一步,消防无人机主体1还包括有消防水枪101、破碎锤头102,消防无人机主体1的顶部固定连接有一组消防水枪101,消防水枪101的顶部螺纹连接有一组破碎锤头102,在使用中,可以通过破碎锤头102对玻璃进行破碎然后通过消防水枪101喷水进行灭火。
30.进一步,行进驱动件2还包括有行进驱动链轮201,行进驱动件2的转轴上同轴固定连接有一组行进驱动链轮201,行进主动轴3还包括有行进从动链轮301,行进主动轴3的中部同轴固定连接有一组行进从动链轮301,行进驱动链轮201与行进从动链轮301之间通过传动链条传动连接,行进驱动链轮201与行进从动链轮301之间共同构成传动链条传动机构,在使用中,行进驱动件2通过由行进驱动链轮201与行进从动链轮301之间共同构成的传动链条传动机构带动行进主动轴3旋转。
31.进一步,行进主动轴3还包括有左行进链轮302,行进主动轴3的中部前后均同轴固定连接有一组左行进链轮302,行进从动轴4还包括有右行进链轮401,行进从动轴4的中部前后均同轴固定连接有一组右行进链轮401,左行进链轮302和右行进链轮401通过行进传动链条5传动连接,左行进链轮302、右行进链轮401、行进传动链条5之间共同构成传动链条传动机构,在使用中,当行进主动轴3旋转,行进主动轴3通过由左行进链轮302、右行进链轮401、行进传动链条5之间共同构成的传动链条传动机构带动行进传动链条5旋转。
32.进一步,行进主动轴3还包括有左行进辊筒303,行进主动轴3的前后端面均同轴固定连接有一组左行进辊筒303,行进从动轴4还包括有右行进辊筒402,行进从动轴4的前后端面均同轴固定连接有一组右行进辊筒402,左行进辊筒303和右行进辊筒402的外侧共同缠绕有一组行进履带6,在使用中通过左行进辊筒303和右行进辊筒402对行进履带6进行支撑。
33.进一步,同侧行进传动链条5的链节外侧与行进履带6固定连接,在使用中当行进传动链条5转动的同时带动行进履带6同步旋转。
34.进一步,行进履带6还包括有吸附气嘴601,行进履带6的外侧设置有一组吸附气嘴601,行进履带6内部为囊式结构,吸附气嘴601与行进履带6的内腔相连通,吸附气嘴601通过软管与真空泵相连接。
35.进一步,行进履带6还包括有行进吸盘602、吸附阀芯603、复位弹簧604,行进履带6的外侧均匀排布固定连接有行进吸盘602,每组行进吸盘602的内部滑动连接有一组吸附阀芯603,吸附阀芯603的上部通过一组复位弹簧604与行进履带6弹性连接,消防无人机主体1的内侧下部前后均固定连接有一组阀体开启驱动块103,当吸附阀芯603位于底部时,吸附阀芯603的顶部与阀体开启驱动块103底部压紧连接共同形成平面凸轮机构,在使用中,当吸附阀芯603位于底部时,在由吸附阀芯603与阀体开启驱动块103共同形成的平面凸轮机构带动吸附阀芯603往下滑动,将吸附阀芯603与行进履带6底部打开,使行进吸盘602与行进履带6内部接通。
36.工作原理:使用时,行进驱动件2通过由行进驱动链轮201与行进从动链轮301之间共同构成的传动链条传动机构带动行进主动轴3旋转,行进主动轴3通过由左行进链轮302、右行进链轮401、行进传动链条5之间共同构成的传动链条传动机构带动行进传动链条5旋转,行进传动链条5带动行进履带6同步旋转,当行进吸盘602转动到底部时,在由吸附阀芯603与阀体开启驱动块103共同形成的平面凸轮机构带动吸附阀芯603往下滑动,将吸附阀芯603与行进履带6底部打开,使行进吸盘602与行进履带6内部接通,在真空泵的吸附作用下行进吸盘602紧密的吸附在墙面上,同时实现了消防无人机主体1的行进,吸附力强,可以在墙面上的行进,当行进到火灾位置的窗口时,可以通过破碎锤头102对玻璃进行破碎然后通过消防水枪101喷水进行灭火。
37.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。