1.本实用新型属于安装车技术领域,具体涉及一种无人机后机身托架装置。
背景技术:
2.后机身托架隶属顶支类设备类,它的主要作用是支撑无人机机身,无人机在安装与检修调试过程中,需要对机身进行长时间的支撑作用以及方便快捷的移动。现有的无人机后机身托架采用整体式的结构,产品难以拆卸,损坏之后难以维修,可维护性很差;其次采用液压车加托架,液压车长时间使用会导致漏油等问题,无法确保托架的稳定性;采用“人字形”托架,在需要较高的升降行程时将受到装置自身长度的限制,主要是支臂长度与支座长度的制约。因此,针对现有存在的问题,本实用新型专利提出一种侧边。
技术实现要素:
3.为了解决现有技术存在的上述问题,本实用新型的目的在于提供一种侧边可拆卸的双级升降无人机后机身托架装置。
4.本实用新型所采用的技术方案为:
5.一种无人机后机身托架装置,包括车架,车架上固定有两根立柱,立柱的另一端连接有第一定位套,第一定位套上转动连接有第一螺母套,第一螺母套内螺纹连接有外丝杠组件,外丝杠组件上转动连接有第二螺母套,第二螺母套内螺纹连接有内丝杠,两根内丝杠之间连接有支托;所述支托的一端可拆卸连接有限位块。
6.无人机水平后机身可放置于支托上,以对后机身进行检修或拆装。由于支托下端连接有两根内丝杠,则转动第二螺母套时,内丝杠在第二螺母的驱动下直线升降。当转动第一螺母套时,第一螺母套驱动外丝杠组件自线升降。从而,本实用新型可分别通过内丝杠和外丝杠组件形成双级升降调整支托高度,保证支托能对无人机后机身的高度和倾角进行准确调整。
7.支托的一端可拆卸连接有限位块,从而支托采用侧边可拆卸的合理设计形式,从而拆下限位块时方便一人推动从侧面放入机身下部。
8.作为本实用新型的优选方案,所述立柱与第一定位套之间通过定位销连接。第一定位套通过定位销连接于立柱上上端,则第一定位套得到可靠固定,使得第一定位套能对外丝杠组件进行可靠支撑。
9.作为本实用新型的优选方案,所述外丝杠组件包括外丝杠,外丝杠与第一螺母套螺纹连接,外丝杠连接有第二定位套,第二定位套与第二螺母套转动连接。第二定位套能对第二螺母套进行可靠支撑,且第二螺母套能相对于第二定位套自由转动,保证第二螺母套能驱动内丝杠准确升降。
10.作为本实用新型的优选方案,所述内丝杠远离支托的一端连接有用于阻挡内丝杠脱出第二定位套的挡板。当内丝杠上升到接触第二定位套时,挡板被第二定位套阻挡,避免内丝杠继续上升。
11.作为本实用新型的优选方案,所述第一螺母套上固定有第一手轮,第二螺母套上固定有第二手轮。通过第一手轮来带动第一螺母套转动,通过第二手轮来带动第二螺母套转动,操作方便。
12.作为本实用新型的优选方案,所述车架的底部安装有若干支撑脚。当本实用新型移动到位后,支撑脚能起到固定和支撑的作用。
13.作为本实用新型的优选方案,所述支撑脚包括转动杆,转动杆与车架主体螺纹连接,转动杆的底部转动连接有支脚座。当本实用新型移动到位后,转动杆转动,则转动杆推动支脚座与地面压紧,起到固定和支撑作用。
14.作为本实用新型的优选方案,所述转动杆远离支脚座的一端连接有支撑手轮。
15.作为本实用新型的优选方案,所述车架的底部安装有若干万向脚轮。带有刹车功能的万向脚轮起到移动和固定的作用。
16.本实用新型的有益效果为:
17.1.本实用新型的支托下端连接有两根内丝杠,则转动第二螺母套时,内丝杠在第二螺母的驱动下直线升降。当转动第一螺母套时,第一螺母套驱动外丝杠组件自线升降。从而,本实用新型可分别通过内丝杠和外丝杠组件形成双级升降调整支托高度,保证支托能对无人机后机身的高度和倾角进行准确调整。
18.2.本实用新型的支托的一端可拆卸连接有限位块,从而支托采用侧边可拆卸的合理设计形式,从而拆下限位块时方便一人推动从侧面放入机身下部。
附图说明
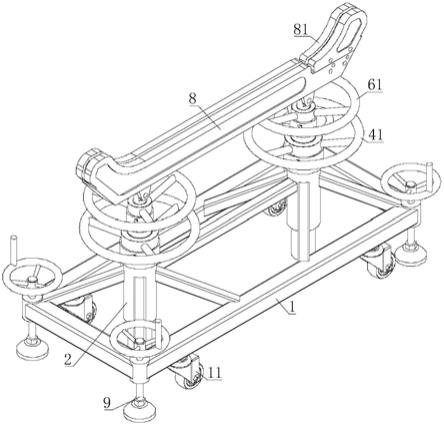
19.图1是本实用新型的结构示意图;
20.图2是本实用新型的主视图;
21.图3是本实用新型的剖视图。
22.图中,1-车架;2-立柱;3-第一定位套;4-第一螺母套;5-外丝杠组件;6-第二螺母套;7-内丝杠;8-支托;9-支撑脚;11-万向脚轮;41-第一手轮;51-外丝杠;52-第二定位套;61-第二手轮;71-挡板;81-限位块;91-转动杆;92-支脚座;93-支撑手轮。
具体实施方式
23.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
24.如图1~图3所示,本实施例的无人机后机身托架装置,包括车架1,车架1上固定有两根立柱2,立柱2的另一端连接有第一定位套3,第一定位套3上通过轴承连接有第一螺母套4,第一螺母套4内螺纹连接有外丝杠组件5,外丝杠组件5上通过轴承连接有第二螺母套6,第二螺母套6内螺纹连接有内丝杠7,两根内丝杠7之间连接有支托8。
25.需要说明的是,所述支托8的一端可拆卸连接有限位块81。限位块81往上弯曲,与支托8共同组成槽型结构,从而无人机后机身放置其上之后能被可靠限位,避免无人机后机身滑落。支托8采用侧边可拆卸的合理设计形式,从而拆下限位块81时方便一人推动从侧面
放入机身下部。
26.无人机水平后机身可放置于支托8上,以对后机身进行检修或拆装。由于支托8下端连接有两根内丝杠7,则转动第二螺母套6时,内丝杠7在第二螺母的驱动下直线升降。当转动第一螺母套4时,第一螺母套4驱动外丝杠组件5自线升降。从而,本实用新型可分别通过内丝杠7和外丝杠组件5形成双级升降调整支托8高度,保证支托8能对无人机后机身的高度和倾角进行准确调整。
27.其中,所述立柱2与第一定位套3之间通过定位销连接。第一定位套3通过定位销连接于立柱2上上端,则第一定位套3得到可靠固定,使得第一定位套3能对外丝杠组件5进行可靠支撑。
28.具体地,所述外丝杠组件5包括外丝杠51,外丝杠51与第一螺母套4螺纹连接,外丝杠51连接有第二定位套52,第二定位套52与第二螺母套6通过轴承连接。第二定位套52能对第二螺母套6进行可靠支撑,且第二螺母套6能相对于第二定位套52自由转动,保证第二螺母套6能驱动内丝杠7准确升降。
29.更进一步,所述内丝杠7远离支托8的一端连接有用于阻挡内丝杠7脱出第二定位套52的挡板71。当内丝杠7上升到接触第二定位套52时,挡板71被第二定位套52阻挡,避免内丝杠7继续上升。
30.所述第一螺母套4上固定有第一手轮41,第二螺母套6上固定有第二手轮61。通过第一手轮41来带动第一螺母套4转动,通过第二手轮61来带动第二螺母套6转动,操作方便。
31.更进一步,所述车架1的底部安装有若干支撑脚9。当本实用新型移动到位后,支撑脚9能起到固定和支撑的作用。所述支撑脚9包括转动杆91,转动杆91与车架1主体螺纹连接,转动杆91的底部转动连接有支脚座92。当本实用新型移动到位后,转动杆91转动,则转动杆91推动支脚座92与地面压紧,起到固定和支撑作用。所述转动杆91远离支脚座92的一端连接有支撑手轮93。
32.更进一步所述车架1的底部安装有若干万向脚轮11。带有刹车功能的万向脚轮11起到移动和固定的作用。
33.需要说明的是:支托8采用abs材料,支托8表面粘贴橡胶软垫。所述轴承为推力球轴承。外丝杠51为tr60梯形丝杆,内丝杠7为tr34梯形丝杆。
34.本实用新型不局限于上述可选实施方式,任何人在本实用新型的启示下都可得出其他各种形式的产品,但不论在其形状或结构上作任何变化,凡是落入本实用新型权利要求界定范围内的技术方案,均落在本实用新型的保护范围之内。