1.本实用新型涉及一种巡检机器人,具体为一种电厂用多功能防火智能巡检机器人。
背景技术:
2.近年来,电力企业发生了多起大型火灾事故,严重影响电力行业安全生产的同时也对电网造成了不安定因素,使得我国工业生产和人民生活用电得不到切实保障,特别是在部分事故中出现了人员伤亡事件和大量经济损失,火灾事故对电力企业冲击巨大。燃煤电厂由于其工艺流程的要求,存在着许多易燃易爆区域,如油库、氨区、氢站、煤场,对这类区域的防火工作是各个电厂的工作重点,现有的电厂防火技术存在以下不足之处:
3.1、现有电厂防火技术主要采用人工巡检+视频监控+固定式防火报警消防系统配合,具体实施方式为:日常人工定时定点对火灾易发生区域进行巡检,同时值班人员可以通过视频监控系统在控制室内对现场情况进行监视,另外通过安装在现场的火灾监测感应报警装置对现场温度、烟气、油气、可燃气体进行采集检测将数据传输至值班室内火灾报警装置总机,当以上方式发现可疑火情时,值班人员立即赶到就地现场确认火情进而采取对应灭火措施,人工巡检由于人员责任心等人为因素并不能对重点区域进行有效巡检,多数电厂并不配置专门人员对视频画面进行24小时监视,监控设备多作为事故原因分析回放使用,同时,发生火情时,监控系统往往视角不能清楚判断火情,需要人员赶到对应区域确认火情后再采取对应措施,此过程产了一定时间差,往往会错过控制火情的黄金时间。
4.2、火灾监测感应报警装置配置的烟感、可燃气采集头等设备均设置在高处等宏观位置,当户外现场其它气流扰动时,会严重影响感应装置工作,同时由于感应装置布置位置多距离设备较远,对于初期火灾并不能做到有效判断,常容易产生误报警,进而影响到值班人员的警惕心。
5.因此需要一种电厂用多功能防火智能巡检机器人对上述问题做出改善。
技术实现要素:
6.本实用新型的目的在于提供一种电厂用多功能防火智能巡检机器人,以解决上述背景技术中提出的问题。
7.为实现上述目的,本实用新型提供如下技术方案:
8.一种电厂用多功能防火智能巡检机器人,包括底座,所述底座上表面固定连接有装置本体,所述装置本体内部固定设有蓄电池,所述蓄电池一侧设有处理器,所述处理器一侧表面固定连接有温度分析计算模块,所述温度分析计算模块一侧表面固定连接有温度传感器,所述温度分析计算模块一侧设有视频识别分析模块,所述视频识别分析模块一侧表面固定连接有摄像头,所述视频识别分析模块一侧设有烟雾分析计算模块,所述烟雾分析计算模块一侧表面固定连接有烟雾传感器,所述处理器上侧设有干粉灭火器,所述干粉灭火器一侧设有二氧化碳灭火器,所述二氧化碳灭火器下侧设有gps卫星定位仪,所述gps卫
星定位仪一侧设有通信模块,所述通信模块一侧设有火警自动报警器,所述火警自动报警器一侧设有语音播报器,所述语音播报器一侧表面固定连接有扩音器。
9.作为本实用新型优选的方案,所述装置本体顶部表面两侧均固定连接有固定板,所述固定板上表面两侧均固定连接有支撑柱,所述支撑柱上端固定连接有弧形太阳能充电板,所述干粉灭火器和二氧化碳灭火器一侧表面均固定设有电磁阀,所述电磁阀一侧固定连接有灭火喷头。
10.作为本实用新型优选的方案,所述底座内部底部表面固定连接有电机,所述电机输出端固定连接有主动轴,所述底座两侧均旋转连接有从动轴,所述从动轴两端均贯穿底座,所述从动轴两端均固定连接有滚轮,相邻两个所述滚轮之间传动连接有履带。
11.作为本实用新型优选的方案,所述主动轴和从动轴均固定设有皮带轮,所述主动轴的皮带轮与从动轴上的皮带轮通过皮带传动连接。
12.作为本实用新型优选的方案,所述温度传感器、烟雾传感器和摄像头均贯穿装置本体一侧表面。
13.作为本实用新型优选的方案,所述装置本体一侧表面固定连接有控制器,所述烟雾传感器与温度分析计算模块之间电性连接,所述摄像头与视频识别分析模块之间电性连接,所述温度传感器与温度分析计算模块之间电性连接,所述处理器分别与控制器、温度分析计算模块、视频识别分析模块、温度分析计算模块、电磁阀、蓄电池、干粉灭火器、二氧化碳灭火器、语音播报器、火警自动报警器、通信模块、gps卫星定位仪、电机和扩音器之间电性连接。
14.与现有技术相比,本实用新型的有益效果是:
15.1、本实用新型中,通过设置的火警自动报警器、干粉灭火器和二氧化碳灭火器,若判断发生火灾时,处理器第一时间打开电磁阀,并启动干粉灭火器和二氧化碳灭火器通过灭火喷头对着火处进行紧急灭火处理,同时处理器启动gps卫星定位仪获取位置信息,并将位置信息以及的分析得到的数据分别通过通信模块和火警自动报警器传递给监控终端和火警中心,方便火警中心及时了解火灾情况,快速准备救援工具以及快速到达现场进行救援灭火,同时启动语音播报器和扩音器进行播报,提醒工作人员撤离火灾现场,能够第一时间对火灾进行紧急处理,放置火势蔓延,无需工作人员24小时监控,避免人工监控产生漏洞导致不能及时发现火灾并报警的问题,减少人工成本的同时增强火灾监视效率,并能够及时发现火情并对初期火情进行有效控制,省去了从发现火情至人员到位而产生的时间差。
16.2、本实用新型中,通过设置的摄像头、温度传感器和烟雾传感器,通过控制器和处理器启动整个装置运行,启动电机转动,电机转动进一步带动主动轴转动,主动轴转动进一步通过皮带带动从动轴转动,从动轴转动进一步带动滚轮转动,进一步带动履带运动,进一步带动整个装置在电厂内运动,进一步对电厂进行巡逻,摄像头对电厂内的环境进行录像,温度传感器和烟雾传感器对电厂内的温度和烟雾进行探测,温度传感器和烟雾传感器受到感应并将数据信号传递给烟雾分析计算模块和温度分析计算模块进行分析,并将视频信息通过视频识别分析模块进行识别分析,视频识别分析模块、烟雾分析计算模块和温度分析计算模块将分析结果传递给处理器,处理器将数据综合比较判断是否起火,可以在电厂多种环境对火灾进行监测,不局限于单一可燃物,工作范围涵盖了电厂油库、氨区、氢站、煤场等所有火灾重点区域,能够实现一台设备全天候监控电厂所有区域,提高火灾判断的准确
性,避免了由于防火系统误报导致的人员频繁无用出警的情况。
附图说明
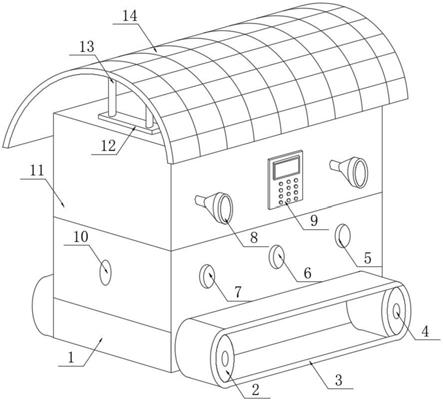
17.图1为本实用新型的立体图;
18.图2为本实用新型的侧剖面结构示意图;
19.图3为本实用新型的处理器处正剖面结构示意图;
20.图4为本实用新型的蓄电池处正剖面结构示意图;
21.图5为本实用新型的电机处横剖面结构示意图。
22.图中:1、底座;2、滚轮;3、履带;4、从动轴;5、烟雾传感器;6、摄像头;7、温度传感器;8、灭火喷头;9、控制器;10、扩音器;11、装置本体;12、固定板;13、支撑柱;14、弧形太阳能充电板;15、电磁阀;16、视频识别分析模块;17、处理器;18、蓄电池;19、烟雾分析计算模块;20、干粉灭火器;21、二氧化碳灭火器;22、温度分析计算模块;23、语音播报器;24、火警自动报警器;25、通信模块;26、gps卫星定位仪;27、电机; 28、主动轴;29、皮带。
具体实施方式
23.下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.为了便于理解本实用新型,下面将参照相关对本实用新型进行更全面的描述。给出了本实用新型的若干实施例。但是,本实用新型可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本实用新型的公开内容更加透彻全面。
25.需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
26.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
27.请参阅图1
‑
5,本实用新型提供一种技术方案:
28.实施例1,请参照图1、2、3、4和5,一种电厂用多功能防火智能巡检机器人,包括底座1,底座1上表面固定连接有装置本体11,装置本体11内部固定设有蓄电池18,蓄电池18一侧设有处理器17,处理器17一侧表面固定连接有温度分析计算模块22,温度分析计算模块22一侧表面固定连接有温度传感器7,温度分析计算模块22一侧设有视频识别分析模块16,视频识别分析模块16一侧表面固定连接有摄像头6,视频识别分析模块16一侧设有烟雾分析计算模块19,烟雾分析计算模块19一侧表面固定连接有烟雾传感器5,处理器17上侧设有干粉灭火器20,干粉灭火器20一侧设有二氧化碳灭火器 21,二氧化碳灭火器21下侧设有
gps卫星定位仪26,gps卫星定位仪26一侧设有通信模块25,通信模块25一侧设有火警自动报警器24,火警自动报警器24一侧设有语音播报器23,语音播报器23一侧表面固定连接有扩音器 10;摄像头6对电厂内的环境进行录像,温度传感器7和烟雾传感器5对电厂内的温度和烟雾进行探测,温度传感器7和烟雾传感器5受到感应并将数据信号传递给烟雾分析计算模块19和温度分析计算模块22进行分析,并将视频信息通过视频识别分析模块16进行识别分析,视频识别分析模块16、烟雾分析计算模块19和温度分析计算模块22将分析结果传递给处理器17,处理器17将数据综合比较判断是否起火,若判断发生火灾,处理器17第一时间打开电磁阀15,并启动干粉灭火器20和二氧化碳灭火器21通过灭火喷头 8对着火处进行紧急灭火处理,同时处理器17启动gps卫星定位仪26获取位置信息,并将位置信息以及的分析得到的数据分别通过通信模块25和火警自动报警器24传递给监控终端和火警中心,方便火警中心及时了解火灾情况,快速准备救援工具以及快速到达现场进行救援灭火,同时启动语音播报器23 和扩音器10进行播报,提醒工作人员撤离火灾现场。
29.实施例2,请参照图1、2、3、4和5,一种电厂用多功能防火智能巡检机器人,包括底座1,底座1上表面固定连接有装置本体11,装置本体11内部固定设有蓄电池18,蓄电池18一侧设有处理器17,处理器17一侧表面固定连接有温度分析计算模块22,温度分析计算模块22一侧表面固定连接有温度传感器7,温度分析计算模块22一侧设有视频识别分析模块16,视频识别分析模块16一侧表面固定连接有摄像头6,视频识别分析模块16一侧设有烟雾分析计算模块19,烟雾分析计算模块19一侧表面固定连接有烟雾传感器5,处理器17上侧设有干粉灭火器20,干粉灭火器20一侧设有二氧化碳灭火器 21,二氧化碳灭火器21下侧设有gps卫星定位仪26,gps卫星定位仪26一侧设有通信模块25,通信模块25一侧设有火警自动报警器24,火警自动报警器24一侧设有语音播报器23,语音播报器23一侧表面固定连接有扩音器 10;装置本体11顶部表面两侧均固定连接有固定板12,固定板12上表面两侧均固定连接有支撑柱13,支撑柱13上端固定连接有弧形太阳能充电板14,干粉灭火器20和二氧化碳灭火器21一侧表面均固定设有电磁阀15,电磁阀 15一侧固定连接有灭火喷头8;底座1内部底部表面固定连接有电机27,电机27输出端固定连接有主动轴28,底座1两侧均旋转连接有从动轴4,从动轴4两端均贯穿底座1,从动轴4两端均固定连接有滚轮2,相邻两个滚轮2 之间传动连接有履带3;主动轴28和从动轴4均固定设有皮带轮,主动轴28 的皮带轮与从动轴4上的皮带轮通过皮带29传动连接;通过控制器9和处理器17启动整个装置运行,启动电机27转动,电机27转动进一步带动主动轴 28转动,主动轴28转动进一步通过皮带29带动从动轴4转动,从动轴4转动进一步带动滚轮2转动,进一步带动履带3运动,进一步带动整个装置在电厂内运动,进一步对电厂进行巡逻。
30.实施例3,请参照图1、2、3、4和5,温度传感器7、烟雾传感器5和摄像头6均贯穿装置本体11一侧表面;装置本体11一侧表面固定连接有控制器9,烟雾传感器5与温度分析计算模块22之间电性连接,摄像头6与视频识别分析模块16之间电性连接,温度传感器7与温度分析计算模块22之间电性连接,处理器17分别与控制器9、温度分析计算模块22、视频识别分析模块16、温度分析计算模块22、电磁阀15、蓄电池18、干粉灭火器20、二氧化碳灭火器21、语音播报器23、火警自动报警器24、通信模块25、gps卫星定位仪26、电机27和扩音器10之间电性连接。
31.工作原理:使用时,通过控制器9和处理器17启动整个装置运行,启动电机27转动,
电机27转动进一步带动主动轴28转动,主动轴28转动进一步通过皮带29带动从动轴4转动,从动轴4转动进一步带动滚轮2转动,进一步带动履带3运动,进一步带动整个装置在电厂内运动,进一步对电厂进行巡逻,摄像头6对电厂内的环境进行录像,温度传感器7和烟雾传感器5 对电厂内的温度和烟雾进行探测,温度传感器7和烟雾传感器5受到感应并将数据信号传递给烟雾分析计算模块19和温度分析计算模块22进行分析,并将视频信息通过视频识别分析模块16进行识别分析,视频识别分析模块16、烟雾分析计算模块19和温度分析计算模块22将分析结果传递给处理器17,处理器17将数据综合比较判断是否起火,若判断发生火灾,处理器17第一时间打开电磁阀15,并启动干粉灭火器20和二氧化碳灭火器21通过灭火喷头8对着火处进行紧急灭火处理,同时处理器17启动gps卫星定位仪26获取位置信息,并将位置信息以及的分析得到的数据分别通过通信模块25和火警自动报警器24传递给监控终端和火警中心,方便火警中心及时了解火灾情况,快速准备救援工具以及快速到达现场进行救援灭火,同时启动语音播报器23和扩音器10进行播报,提醒工作人员撤离火灾现场,弧形太阳能充电板14能对蓄电池18进行充电,上述处理器17为amr处理器,温度传感器7 为pt100温度传感器,烟雾传感器5为kgq
‑
1烟雾传感器。
32.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。