1.本发明属于智能设备领域,尤其涉及一种智能码垛机。
背景技术:
2.众所周知,随着工业、农业的发展,各类生产均往大批量方向发展,在将物品进行码垛和运输过程中,常规的方法是采用叉车等工具或人工进行搬运,叉车搬运费时费力,人工搬运过程中,工人的劳动强度较强,且大物件人工抬不动,人工码垛会码不整齐,存在一定安全隐患,目前大部分的码垛机体积大,结构复杂,体积较大,操作不够方便,机器成本较高,且生产效率低,而机器人配备的机械手需要气泵或者较多的电机配合,不适用于中小型企业使用,在码垛量不大的情况下性价比不高,且机械臂类的搬运机器人维护保养不便,对工作环境要求比较高。
技术实现要素:
3.本发明的目的是针对现有的技术存在上述问题,提出了一种智能码垛机,本智能码垛机能对中大型物品进行智能堆叠码垛。
4.本发明的目的可通过下列技术方案来实现:一种智能码垛机,包括壳体,所述壳体下端固定设有传送台,所述传送台的右端设有智能移动平台,所述传送台上端固定设有电机支撑柱,所述电机支撑柱上设有电动往复装置,每个所述壳体上设有推移装置。
5.优选的,智能移动平台包括固定设置在所述传送台右侧的导轨,所述导轨上滑动设有滑动板,所述滑动板下侧面上对称设有四个车轮,所述滑动板上侧面上对称设有两个电动推杆,所述电动推杆上端固定设有承载板。
6.优选的,电动往复装置包括固定设置在所述电机支撑柱上的电机,所述电机的输出端上设有电机轴,所述电机轴上固定设有摆杆,所述摆杆上铰接设有推杆。
7.优选的,推移装置包括固定设置在所述壳体上端的两个滑台,每个所述滑台上设有长滑腔,每个所述滑台上滑动设有内滑块,所述内滑块上设有v型滑腔,所述内滑块左端固定设有铰接头,所述铰接头与所述推杆铰接。
8.优选的,抓手固定装置包括滑动设置在每个所述长滑腔内的方形滑块,每个所述方形滑块上固定设有外挡圈,两个所述方形滑块之间连接有横杆,所述横杆上对称固定设有两个内挡圈,所述横杆中部固定设有圆形固定板,所述圆形固定板下端沿圆周方向固定设有四个连接杆,所述连接杆下端固定设有焊接板。
9.优选的,抓手装置包括对称固定设置在所述焊接板上的两个滑动限位箱,每个所述滑动限位箱内部转动设有电控转盘,每个所述电控转盘上对称转动设有两个短铰接杆,靠近所述滑动限位箱外侧的所述短铰接杆上铰接设有小推杆,靠近所述滑动限位箱内侧的所述短铰接杆上铰接设有插销杆,每个所述滑动限位箱内部固定设有推杆限位块,所述推杆限位块与所述小推杆滑动连接,所述推杆限位块与所述插销杆滑动连接,每个所述小推杆下端固定设有上滑动固定块,所述上滑动固定块与所述滑动限位箱滑动连接,每个所述
滑动限位箱内滑动设有下滑动固定块,每个所述下滑动固定块与每个所述滑动限位箱内部下侧面上连接有压缩弹簧,每个所述滑动限位箱下侧固定设有抓手固定板,每个所述抓手固定板内部设有短铰接杆,每个所述短铰接杆内滑动且转动设有滑动转轴,每个所述滑动转轴上铰接设有铰接杆,两个所述抓手固定板之间滑动设有推动滑块,两个所述铰接杆下端与所述推动滑块上端铰接,所述推动滑块上对称设有两个联动杆固定块,两个所述联动杆固定块之间对称连接有两个联动杆,每个所述联动杆上均匀转动设有若干抓手,每个所述抓手固定板上转动且滑动设有通轴,每个所述通轴与所述抓手固定板之间连接有缓冲弹簧,每个所述通轴与每组所述抓手中部转动连接。
10.当需要对货物进行码垛时,启动电机,带动电机轴转动,使得固定设置在电机轴上的摆杆同步转动,带动与摆杆铰接的推杆移动,通过与推杆铰接的铰接头推动内滑块移动,经过内滑块上的v型滑腔与滑台上的长滑腔的作用,使得处于滑槽内的方形滑块抬升,接着在滑槽内进行直线移动,最后向下移动,带动方形滑块之间的横杆同步移动,使得固定在圆形固定板上的抓手装置实现往复运动,简单的驱动结构能够完成往复的拾放操作,维修维护方便,极大降低了整机价格。
11.当需要抓取货物时,下移的横杆带动抓手装置下移,使得联动杆固定块抵住货物,抓手装置整体继续下移,使得推动滑块在两个抓手固定板之间滑动,使得铰接杆推动滑动转轴在短铰接杆内滑动且转动,直至滑动转轴卡在上滑动固定块与下滑动固定块之间,同时的上滑动固定块上移,推动小推杆向上移动,通过短铰接杆带动电控转盘转动,使得与短铰接杆铰接的插销杆下移,使得插销杆上的缝隙与铰接杆贴合,并同时卡住滑动转轴,使得滑动转轴无法脱落,当需要将货物松开时启动电控转盘使其反转,带动插销杆抬升,通过货物的重力使得滑动转轴从下滑动固定块和上滑动固定块内脱落,带动抓手张开使得货物脱落,能够通过物体自身的体积和重量实现对货物的夹取和放置,有效的避免了夹取过程中空夹和物体脱落的问题。
12.当需要码货时,通过摄像头识别位置,从而控制导轨启动关闭,通过滑动板底端的车轮支撑,进而使得滑动板前后移动,同时的控制电动推杆伸缩实现重复堆叠货物,智能化的智能移动平台能够准确的定位下落的物品,使其能够准确稳定的堆叠码垛。
13.与现有技术相比,本智能码垛机具有以下优点:
14.1.拥有简单的驱动结构不仅能够完成往复的拾放操作,而且维修维护方便,极大降低了整机价格。
15.2.在夹取货物时能够通过物体自身的体积和重量实现对货物的夹取和放置,有效的避免了夹取过程中空夹和物体脱落的问题。
16.3.智能化的智能移动平台能够准确的定位下落的物品,使其能够准确稳定的堆叠码垛。
附图说明
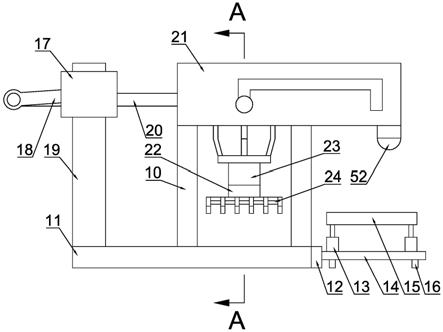
17.图1是智能码垛机的结构示意图。
18.图2是图1中a-a方向剖视图。
19.图3是图2中b-b方向剖视图。
20.图4是图2中c处剖视放大图。
21.图5是抓手固定装置结构示意图。
22.图中,10、壳体;11、传送台;12、导轨;13、电动推杆;14、滑动板;15、承载板;16、车轮;17、电机;18、摆杆;19、电机支撑柱;20、推杆;21、滑台;22、抓手固定板;23、滑动限位箱;24、联动杆;25、长滑腔;26、方形滑块;27、内滑块;28、外挡圈;29、内挡圈;30、连接杆;31、圆形固定板;32、v型滑腔;33、铰接头;34、电机轴;35、滑动转轴;36、缓冲弹簧;37、抓手;38、联动杆固定块;39、推动滑块;40、铰接杆;41、压缩弹簧;42、下滑动固定块;43、上滑动固定块;44、小推杆;45、电控转盘;46、短铰接杆;47、焊接板;48、横杆;49、推杆限位块;50、插销杆;51、通轴;52、摄像头。
具体实施方式
23.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
24.如图1所示,一种智能码垛机,包括壳体10,壳体10下端固定设有传送台11,传送台11的右端设有智能移动平台,传送台11上端固定设有电机支撑柱19,电机支撑柱19上设有电动往复装置,每个壳体10上设有推移装置。
25.如图1和图3所示,智能移动平台包括固定设置在传送台11右侧的导轨12,导轨12上滑动设有滑动板14,滑动板14下侧面上对称设有四个车轮16,滑动板14上侧面上对称设有两个电动推杆13,电动推杆13上端固定设有承载板15。
26.如图1和图3所示,电动往复装置包括固定设置在电机支撑柱19上的电机17,电机17的输出端上设有电机轴34,电机轴34上固定设有摆杆18,摆杆18上铰接设有推杆20。
27.如图1、图2和图3所示,推移装置包括固定设置在壳体10上端的两个滑台21,每个滑台21上设有长滑腔25,每个滑台21上滑动设有内滑块27,内滑块27上设有v型滑腔32,内滑块27左端固定设有铰接头33,铰接头33与推杆20铰接。
28.如图2、图3和图5所示,抓手固定装置包括滑动设置在每个长滑腔25内的方形滑块26,每个方形滑块26上固定设有外挡圈28,两个方形滑块26之间连接有横杆48,横杆48上对称固定设有两个内挡圈29,横杆48中部固定设有圆形固定板31,圆形固定板31下端沿圆周方向固定设有四个连接杆30,连接杆30下端固定设有焊接板47。
29.如图1、图2和图4所示,抓手装置包括对称固定设置在焊接板47上的两个滑动限位箱23,每个滑动限位箱23内部转动设有电控转盘45,每个电控转盘45上对称转动设有两个短铰接杆46,靠近滑动限位箱23外侧的短铰接杆46上铰接设有小推杆44,靠近滑动限位箱23内侧的短铰接杆46上铰接设有插销杆50,每个滑动限位箱23内部固定设有推杆限位块49,推杆限位块49与小推杆44滑动连接,推杆限位块49与插销杆50滑动连接,每个小推杆44下端固定设有上滑动固定块43,上滑动固定块43与滑动限位箱23滑动连接,每个滑动限位箱23内滑动设有下滑动固定块42,每个下滑动固定块42与每个滑动限位箱23内部下侧面上连接有压缩弹簧41,每个滑动限位箱23下侧固定设有抓手固定板22,每个抓手固定板22内部设有短铰接杆46,每个短铰接杆46内滑动且转动设有滑动转轴35,每个滑动转轴35上铰接设有铰接杆40,两个抓手固定板22之间滑动设有推动滑块39,两个铰接杆40下端与推动滑块39上端铰接,推动滑块39上对称设有两个联动杆固定块38,两个联动杆固定块38之间对称连接有两个联动杆24,每个联动杆24上均匀转动设有若干抓手37,每个抓手固定板22
上转动且滑动设有通轴51,每个通轴51与抓手固定板22之间连接有缓冲弹簧36,每个通轴51与每组抓手37中部转动连接。
30.当需要对货物进行码垛时,启动电机17,带动电机轴34转动,使得固定设置在电机轴34上的摆杆18同步转动,带动与摆杆18铰接的推杆20移动,通过与推杆20铰接的铰接头33推动内滑块27移动,经过内滑块27上的v型滑腔32与滑台21上的长滑腔25的作用,使得处于滑槽内的方形滑块26抬升,接着在滑槽内进行直线移动,最后向下移动,带动方形滑块26之间的横杆48同步移动,使得固定在圆形固定板31上的抓手装置实现往复运动,简单的驱动结构能够完成往复的拾放操作,维修维护方便,极大降低了整机价格。
31.当需要抓取货物时,下移的横杆48带动抓手装置下移,使得联动杆固定块38抵住货物,抓手装置整体继续下移,使得推动滑块39在两个抓手固定板22之间滑动,使得铰接杆40推动滑动转轴35在短铰接杆46内滑动且转动,直至滑动转轴35卡在上滑动固定块43与下滑动固定块42之间,同时的上滑动固定块43上移,推动小推杆44向上移动,通过短铰接杆46带动电控转盘45转动,使得与短铰接杆46铰接的插销杆50下移,使得插销杆50上的缝隙与铰接杆40贴合,并同时卡住滑动转轴35,使得滑动转轴35无法脱落,当需要将货物松开时启动电控转盘45使其反转,带动插销杆50抬升,通过货物的重力使得滑动转轴35从下滑动固定块42和上滑动固定块43内脱落,带动抓手37张开使得货物脱落,能够通过物体自身的体积和重量实现对货物的夹取和放置,有效的避免了夹取过程中空夹和物体脱落的问题。
32.当需要码货时,通过摄像头52识别位置,从而控制导轨12启动关闭,通过滑动板14底端的车轮16支撑,进而使得滑动板14前后移动,同时的控制电动推杆13伸缩实现重复堆叠货物,智能化的智能移动平台能够准确的定位下落的物品,使其能够准确稳定的堆叠码垛。
33.以上所述仅为本发明的实施例,并非因此限制本发明的专利保护范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。