一种基于图像识别的搬运agv
技术领域
1.本实用新型涉及agv技术领域,具体为一种基于图像识别的搬运agv。
背景技术:
2.(automated guided vehicle,简称agv),通常也称为agv小车。指装备有电磁或光学等自动导航装置,能够沿规定的导航路径行驶,具有安全保护以及各种移载功能的运输车。工业应用中不需要驾驶员的搬运车,以可充电的蓄电池为其动力来源。一般可通过电脑来控制其行进路径以及行为,或利用电磁轨道(electromagnetic path-following system)来设立其行进路径,电磁轨道黏贴于地板上,无人搬运车则依靠电磁轨道所带来的讯息进行移动与动作。
3.传统的agv小车功能单一,直接将物体放入到车上时,没有对运输的物体进行缓冲,在颠簸路上,小车上的物体可能脱落;其次没有相关测量标注,当物体堆积太高,甚至大于通道门的高度,需要对物体进行卸货分开运输;在运输过程中当小车撞到物体上,没有相应的保护措施,对小车造成损坏,为解决上述问题,本技术中提出一种基于图像识别的搬运agv。
技术实现要素:
4.(一)实用新型目的
5.为解决背景技术中存在的技术问题,本实用新型提出一种基于图像识别的搬运agv,通过设有置物板与以及第一弹簧能够增加对物体运输的稳定性,通过可调节长杆,能够测量堆积物体的高度,通过设有防撞机构能够有效的对车体进行保护。
6.(二)技术方案
7.为解决上述技术问题,本实用新型提供了一种基于图像识别的搬运agv,包括车体和四个万向轮,所述车体的上端设有空槽,所述空槽的内壁固定连接有电动伸缩杆,所述电动伸缩杆的上端设有缓冲机构,所述车体的上端固定连接有空心杆,所述空心杆上设有测量机构,所述车体的一端设有防撞机构。
8.优选的,所述缓冲机构包括电动伸缩杆的上端固定连接的承重板,所述承重板的上端固定连接有四个伸缩杆,四个所述伸缩杆上均套设有第一弹簧,四个所述伸缩杆与四个第一弹簧共同固定连接有置物板。
9.优选的,所述置物板的上端设有放置槽,所述放置槽的内壁滑动连接有滑块,所述滑块的上端固定连接有第一抵块,所述第一抵块的侧壁固定连接有多个短杆,多个所述短杆共同固定连接有第二抵块。
10.优选的,所述滑块的侧壁转动连接有丝杆,所述丝杆贯穿置物板的一端并与其螺纹连接。
11.优选的,所述测量机构包括与空心杆的内壁滑动连接的长杆,所述长杆的上端固定连接有固定块。
12.优选的,所述空心杆的侧壁设有t形槽,所述t形槽的内壁螺纹连接有螺纹把手,所述螺纹把手固定连接有摩擦块,所述摩擦块与长杆的外壁相抵。
13.优选的,所述防撞机构包括与车体的侧壁固定连接的第一空心块与第二空心块,所述第一空心块的内壁滑动连接有第一活塞,所述第一活塞与第一空心块的内壁之间固定连接有第一弹簧,所述第一活塞固定连接有第一连接杆,所述第一连接杆与第一空心块滑动连接。
14.优选的,所述第二空心块的内壁滑动连接有第二活塞,所述第二活塞的一端与第二空心块的内壁之间固定连接有第二弹簧,所述第二活塞的另一端固定连接第二连接杆,所述第二连接杆与第二空心块的内壁滑动连接。
15.优选的,所述第二连接杆固定连接有第一海绵垫,所述第一空心块与第二空心块之间固定连接有导气管。
16.优选的,所述第一连接杆固定连接有栏板,所述栏板的侧壁固定连接有多个第二弹簧,多个所述第二弹簧共同固定连接有第二海绵垫。
17.本实用新型的上述技术方案具有如下有益的技术效果:
18.1、本实用新型当使用者需要放置物体时,将物体放入到放置槽中,第二抵块能够对物体进行相抵,同时四个伸缩杆与其上的第一弹簧共同对置物板进行缓冲,增加车体运输物体的稳定性。
19.2、本实用新型工作人员通过长杆上的刻度,能够清楚明白堆积物体的高度,同时还可以向上或者向下移动长杆,通过螺纹把手并使摩擦块与长杆相配合,可以调节长杆的长度,增加测量的范围。
20.3、通过设有防撞机构能够有效的对车体进行保护,当撞击到第二海绵垫时,第二海绵垫压缩多个第三弹簧,多个第三弹簧对第二海绵垫进行缓冲,同时第二连接杆推动第一海绵垫对栏板进行缓冲,能够有效的降低碰撞产生的冲击力。
附图说明
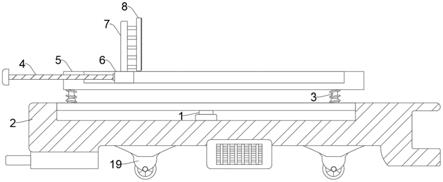
21.图1为实施例1提出的一种基于图像识别的搬运agv的结构示意图;
22.图2为实施例2提出的一种基于图像识别的搬运agv的结构示意图;
23.图3为图2中a处结构放大图;
24.图4为实施例3提出的一种基于图像识别的搬运agv的结构示意图;
25.图中:1电动伸缩杆、2车体、3伸缩杆、4丝杆、5置物板、6滑块、7第一抵块、8第二抵块、9长杆、10栏板、11空心杆、12第二空心块、13第二连接杆、14第一海绵垫、15第一活塞、16第一空心块、17第三弹簧、18第二海绵垫、19万向轮、20螺纹把手、21摩擦块。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
27.实施例1
28.参照图1,一种基于图像识别的搬运agv,包括车体2和四个万向轮19,车体2的上端
设有空槽,空槽的内壁固定连接有电动伸缩杆1,电动伸缩杆1的上端设有缓冲机构,缓冲机构包括电动伸缩杆1的上端固定连接的承重板,承重板的上端固定连接有四个伸缩杆3,四个伸缩杆3上均套设有第一弹簧,四个伸缩杆3与四个第一弹簧共同固定连接有置物板5,可以将物体放入到置物板5上。
29.置物板5的上端设有放置槽,放置槽的内壁滑动连接有滑块6,滑块6的上端固定连接有第一抵块7,第一抵块7的侧壁固定连接有多个短杆,多个短杆共同固定连接有第二抵块8,滑块6的侧壁转动连接有丝杆4,丝杆4贯穿置物板5的一端并与其螺纹连接,滑块6可以对物体进行限位。
30.进一步解释,当使用者者需要放置物体时,将物体放入到放置槽中,之后转动丝杆4,丝杆4转动带动滑块6与第二抵块8进行移动,第二抵块8能够对物体进行相抵,同时四个伸缩杆3与其上的第一弹簧共同对置物板5进行缓冲,增加置物板5运输物体的稳定性。
31.实施例2
32.参照图2-3,本实施例与实施例1不同的是,本实施例中测量机构包括与空心杆11的内壁滑动连接的长杆9,长杆9上设有刻度尺,长杆9的上端固定连接有固定块,空心杆11的侧壁设有t形槽,t形槽的内壁螺纹连接有螺纹把手20,螺纹把手20固定连接有摩擦块21,摩擦块21与长杆9的外壁相抵。
33.进行一步解释,通过长杆9上的刻度,工作人员清楚看到堆积物体的高度,若需要调节长杆9的高度时,扩大刻度的范围,使用者将螺纹把手20进行转动,并使摩擦块21不再与长杆9的外壁相抵,即可以向上或者向下移动长杆9,当将长杆9移动到合适位置时,反向转动螺纹把手20并使摩擦块21与长杆9相抵,即完成对其的限位。
34.实施例3
35.参照图4,本实施例与实施例1、2不同的是,本实施例中防撞机构包括与车体2的侧壁固定连接的第一空心块16与第二空心块12,第一空心块16的内壁滑动连接有第一活塞15,第一活塞15与第一空心块16的内壁之间固定连接有第一弹簧,第一活塞15固定连接有第一连接杆,第一连接杆与第一空心块16滑动连接,第二空心块12的内壁滑动连接有第二活塞,第二活塞的一端与第二空心块12的内壁之间固定连接有第二弹簧,第二活塞的另一端固定连接第二连接杆13,第二连接杆13与第二空心块12的内壁滑动连接,第二连接杆13固定连接有第一海绵垫14,第一空心块16与第二空心块12之间固定连接有导气管,第一连接杆固定连接有栏板10,栏板10的侧壁固定连接有多个第三弹簧17,多个第三弹簧17共同固定连接有第二海绵垫18。
36.进一步解释,通过设有防撞机构能够有效的对车体2进行保护,当撞击到第二海绵垫18时,第二海绵垫18压缩多个第三弹簧17,多个第三弹簧17对第二海绵垫18进行缓冲,同时带动栏板10对第一连接杆和第一活塞15产生推力,第一活塞15将第一空心块16中的空气通过导气管进入到第二空心块12中,并使第二活塞和第二连接杆13推动第一海绵垫14对栏板10进行缓冲,能够有效的降低碰撞产生的冲击力。
37.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。