1.本实用新型属于玻璃加工技术领域,尤其涉及一种玻璃搬运机构。
背景技术:
2.玻璃是非晶无机非金属材料,一般是用多种无机矿物(如石英砂、硼砂、硼酸、重晶石、碳酸钡、石灰石、长石、纯碱等)为主要原料,另外加入少量辅助原料制成的。
3.现阶段,玻璃的机加工还是由传统行业占主要市场,但是传统行业的机加工的精度及表面要求不能满足飞速发展的需求,激光加工也慢慢扩大了市场。
4.玻璃产品由于其特殊性,加工时不能产生划痕,激光加工时不能有脏物影响加工区域,因此在上下料过程中不能直接接触到工件是玻璃产品加工的重中之重,目前对于玻璃的上下料搬运往往是采用人工搬运的方式进行,这种方式需要消耗大量人力,极大的增加了工人的劳动强度,并且人工搬运的效率低下,容易使玻璃表面出现划痕,影响后续的加工品质。
技术实现要素:
5.本实用新型克服了现有技术的不足,提供一种玻璃搬运机构,以解决现有技术中存在的问题。
6.为达到上述目的,本实用新型采用的技术方案为:一种玻璃搬运机构,对玻璃进行搬运,所述搬运机构包括安装型材、位于所述安装型材两端的安装板、对玻璃进行搬运的x轴模组、沿所述x轴模组长度方向进行运动的y轴模组以及位于所述y轴模组驱动端的吸盘;其中:
7.所述x轴模组包括固定于两安装板之间的齿条、作为驱动源的驱动电机以及位于所述驱动电机转轴端的齿轮,所述齿轮与所述齿条啮合,当驱动电机启动时,所述驱动电机沿所述齿条长度方向进行运动;
8.所述y轴模组通过连接组件与所述驱动电机连接,所述y轴模组包括驱动气缸与位于所述驱动气缸活塞杆端的安装块;
9.所述吸盘数量为多个且均匀分布于所述安装块上。
10.本实用新型一个较佳实施例中,所述驱动电机为伺服电机或步进电机。
11.本实用新型一个较佳实施例中,所述连接组件包括第一连接块与第二连接块,所述第一连接块固定于所述驱动电机上,所述第二连接块固定于所述驱动气缸上,所述第二连接块通过轴承块与所述第一连接块连接。
12.本实用新型一个较佳实施例中,两安装板之间设置有导柱,所述导柱贯穿所述轴承块。
13.本实用新型一个较佳实施例中,所述吸盘为真空吸盘且位于所述安装块的四个角位置处。
14.本实用新型解决了背景技术中存在的缺陷,本实用新型具备以下有益效果:
15.(1)本实用新型在安装型材、安装板、x轴模组、y轴模组以及吸盘的配合作用下,实现了对玻璃的快速搬运输送,无需人工操作,极大的降低了工人的劳动强度,减少了人力的消耗,提高了搬运效率,能够有效地避免玻璃表面出现划痕;
16.(2)导柱的存在,能够对轴承块的运动进行导向,进而通过x轴模组对玻璃的搬运进行导向,保证对玻璃搬运的精准性。
附图说明
17.下面结合附图和实施例对本实用新型进一步说明;
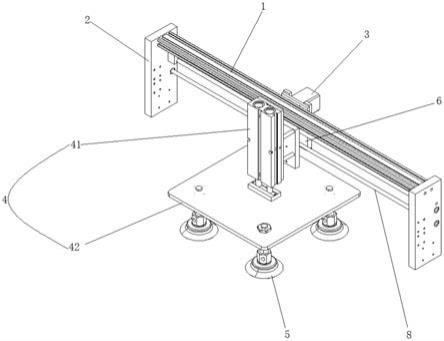
18.图1为本实用新型优选实施例一整体结构示意图;
19.图2为本实用新型优选实施例另一整体结构示意图;
20.图3为图2中a部放大图;
21.图中:1、安装型材;2、安装板;3、x轴模组;31、齿条;32、驱动电机;33、齿轮;4、y轴模组;41、驱动气缸;42、安装块;5、吸盘;6、连接组件;61、第一连接块;62、第二连接块;7、轴承块;8、导柱。
具体实施方式
22.现在结合附图和实施例对本实用新型作进一步详细的说明,这些附图均为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
23.如图1所示,一种玻璃搬运机构,对玻璃进行搬运,搬运机构包括安装型材1、位于安装型材1两端的安装板2、对玻璃进行搬运的x轴模组3、沿x轴模组3长度方向进行运动的y轴模组4以及位于y轴模组4驱动端的吸盘5。
24.结合图2与图3所示,x轴模组3包括固定于两安装板2之间的齿条31、作为驱动源的驱动电机32以及位于驱动电机32转轴端的齿轮33,齿轮33与齿条31啮合,当驱动电机32启动时,驱动电机32沿齿条31长度方向进行运动,驱动电机32采用伺服电机或步进电机,驱动电机32启动后,带动齿轮33进行转动,由于齿条31固定于两安装板2之间,而齿轮33与齿条31啮合,因此齿轮33在转动过程中会沿齿条31长度方向进行运动,进而带动驱动电机32沿齿条31长度方向进行运动,驱动电机32在运动过程中,带动y轴模组4进行同步运动。
25.结合图1与图2所示,y轴模组4通过连接组件6与驱动电机32连接,y轴模组4包括驱动气缸41与位于驱动气缸41活塞杆端的安装块42,连接组件6包括第一连接块61与第二连接块62,第一连接块61固定于驱动电机32上,第二连接块62固定于驱动气缸41上,第二连接块62通过轴承块7与第一连接块61连接,两安装板2之间设置有导柱8,导柱8贯穿轴承块7,吸盘5数量为多个且均匀分布于安装块42上,吸盘5为真空吸盘5且位于安装块42的四个角位置处,在玻璃的吸附过程中,驱动气缸41通过安装块42驱动吸盘5靠近玻璃,对玻璃进行吸附,吸附后,x轴模组3的驱动电机32带动驱动气缸41进行x轴方向的运动,以实现玻璃的搬运,而导柱8的存在,能够对轴承块7的运动进行导向,进而通过x轴模组3对玻璃的搬运进行导向,保证对玻璃搬运的精准性。
26.总而言之,本实用新型在安装型材1、安装板2、x轴模组3、y轴模组4以及吸盘5的配合作用下,实现了对玻璃的快速搬运输送,无需人工操作,极大的降低了工人的劳动强度,
减少了人力的消耗,提高了搬运效率,能够有效地避免玻璃表面出现划痕。
27.以上依据本实用新型的理想实施例为启示,通过上述的说明内容,相关人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定技术性范围。
技术特征:
1.一种玻璃搬运机构,对玻璃进行搬运,其特征在于,所述搬运机构包括安装型材、位于所述安装型材两端的安装板、对玻璃进行搬运的x轴模组、沿所述x轴模组长度方向进行运动的y轴模组以及位于所述y轴模组驱动端的吸盘;其中:所述x轴模组包括固定于两安装板之间的齿条、作为驱动源的驱动电机以及位于所述驱动电机转轴端的齿轮,所述齿轮与所述齿条啮合,当驱动电机启动时,所述驱动电机沿所述齿条长度方向进行运动;所述y轴模组通过连接组件与所述驱动电机连接,所述y轴模组包括驱动气缸与位于所述驱动气缸活塞杆端的安装块;所述吸盘数量为多个且均匀分布于所述安装块上。2.根据权利要求1所述的一种玻璃搬运机构,其特征在于,所述驱动电机为伺服电机或步进电机。3.根据权利要求1所述的一种玻璃搬运机构,其特征在于,所述连接组件包括第一连接块与第二连接块,所述第一连接块固定于所述驱动电机上,所述第二连接块固定于所述驱动气缸上,所述第二连接块通过轴承块与所述第一连接块连接。4.根据权利要求3所述的一种玻璃搬运机构,其特征在于,两安装板之间设置有导柱,所述导柱贯穿所述轴承块。5.根据权利要求1所述的一种玻璃搬运机构,其特征在于,所述吸盘为真空吸盘且位于所述安装块的四个角位置处。
技术总结
本实用新型公开了一种玻璃搬运机构,对玻璃进行搬运,所述搬运机构包括安装型材、位于所述安装型材两端的安装板、对玻璃进行搬运的X轴模组、沿所述X轴模组长度方向进行运动的Y轴模组以及位于所述Y轴模组驱动端的吸盘;所述X轴模组包括固定于两安装板之间的齿条、作为驱动源的驱动电机以及位于所述驱动电机转轴端的齿轮,所述齿轮与所述齿条啮合;所述Y轴模组通过连接组件与所述驱动电机连接,所述Y轴模组包括驱动气缸与位于所述驱动气缸活塞杆端的安装块;所述吸盘数量为多个且均匀分布于所述安装块上。本实用新型实现了对玻璃的快速搬运输送,无需人工操作,减少了人力的消耗,提高了搬运效率,能够有效地避免玻璃表面出现划痕。划痕。划痕。
技术研发人员:刘永平 董红波 朱梦成
受保护的技术使用者:苏州快光科技有限公司
技术研发日:2021.09.08
技术公布日:2022/2/11