1.本发明涉及机械手控制领域,特别涉及一种基于自适应巡航技术的码垛机械手的控制方法。
背景技术:
2.产品仓库中常有大量的货物需要进行码垛堆叠,货物在入库上架或者出库时,需要将散放的货物按照一定的方式尽可能紧密的码放在托盘上,以便于配送和运输。这一过程主要是通过输送线将货物运送到码垛机的机械手臂处,再通过机械手抓取货物,并根据指定的码放坐标将货物码放在托盘上来实现的。
3.现有的码垛方式主要包括基本顺序码垛方法、横竖交错码垛方法和压缝式码垛方法。现有的码垛方式具有简单规整的特点,但是货物的紧密度不足,在码垛的精度、效率上都有所限制,尤其是在要求运行频率高以及工件单件重量大的情况下,在通过机械手进行码垛过程中,难以对机械手运动过程进行自适应巡航控制,容易造成机械手运动过程中影响码垛物品的效率。
技术实现要素:
4.本发明提供一种基于自适应巡航技术的码垛机械手的控制方法,用以提高码垛效率,提高码垛的精度,更大程度上利用空间位置。
5.本发明提供一种基于自适应巡航技术的码垛机械手的控制方法,包括:
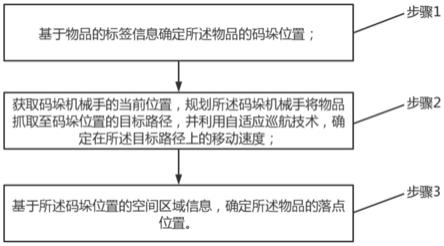
6.步骤1:基于物品的标签信息确定所述物品的码垛位置;
7.步骤2:获取码垛机械手的当前位置,规划所述码垛机械手将物品抓取至码垛位置的目标路径,并利用自适应巡航技术,确定在所述目标路径上的移动速度;
8.步骤3:基于所述码垛位置的空间区域信息,确定所述物品的落点位置。
9.在一种可能实现的方式中,
10.所述目标路径包括第一路径和第二路径;
11.其中,所述码垛机械手到达所述物品处的路径为第一路径;
12.所述码垛机械手抓取所述物品到达所述码垛位置的路径为第二路径。
13.在一种可能实现的方式中,
14.步骤1中,基于物品的标签信息确定所述物品的码垛位置包括:
15.对所述标签信息进行扫描,提取所述标签信息中的文字部分,对所述文字部分进行关键字提取,并确定所述关键字所在的区域;
16.根据所述区域所包含的文字,确定所述物品的物流信息,并根据所述物流信息确定所述物品的下一个目的地;
17.根据地区存放表,确定所述物品的放置区域,并根据所述放置区域的区域信息,确定码垛位置。
18.在一种可能实现的方式中,
19.根据所述放置区域的区域信息,确定码垛位置包括:
20.根据所述区域信息建立所述放置区域的空间坐标系,从所述空间坐标系中选择满足所述物品的体积的第一空间位置;
21.根据所述第一空间位置中下方物品的属性信息,从所述第一空间位置中选择满足所述物品的重量的第二空间位置;
22.根据所述第二空间位置的坐标信息,确定所述坐标信息与所述物品的重量和体积的适配度;
23.选择适配度最高的第二空间位置作为码垛位置。
24.在一种可能实现的方式中,
25.步骤2中,规划所述码垛机械手将物品抓取至码垛位置的目标路径包括:
26.获取所述码垛机械手移动区域的空间图像,确定所述空间图像中三维坐标系的原点,并建立所述空间图像中各像素点的二维坐标,基于所述原点与其对应的像素点的二维坐标,确定映射关系;
27.基于所述映射关系,确定所述空间图像中各像素点的二维坐标对应三维坐标系的三维坐标;
28.根据图像差分法,提取所述空间图像中的障碍物,并确定所述障碍物的三维坐标;
29.根据所述障碍物的三维坐标,建立障碍物虚拟场景;
30.在所述障碍物虚拟场景下,动态控制所述码垛机械手的移动,根据移动情况,确定目标路径。
31.在一种可能实现的方式中,
32.步骤2中,利用自适应巡航技术,确定在所述目标路径上的移动速度包括:
33.步骤201,利用自适应巡航技术,实时监测所述码垛机械手的在目标路径上的当前位置及前方路径情况;
34.步骤202,利用前方位置的情况确定所述码垛机械手的参考速度;
35.步骤203,根据所述码垛机械手的抓取物品的特征,及所述述码垛机械手的关节角度,以所述参考为基准,确定移动速度;
36.步骤204,使所述码垛机械手按照所述移动速度在所述目标路径上移动,当监测到所述码垛机械手的在目标路径上的前方路径情况发生改变时,返回步骤201-203,重新得到新的移动速度。
37.在一种可能实现的方式中,
38.步骤3中,基于所述码垛位置的空间区域信息,确定所述物品的落点位置包括:
39.建立所述码垛位置所在水平面、垂直面的第一坐标系和第二坐标系;
40.基于目标垛型,确定所述物品的摆放方向;
41.获取所述物品在水平面的第一平面形状,并根据所述第一平面形状的尺寸确定在所述第一坐标系的可放置位置区域边缘坐标,从所述边缘坐标中选择最靠近临近物品为基准坐标点,将所述基准坐标点作为码垛所述物品的边坐标点,在所述可放置位置区域中确定多个摆放方式;
42.基于所述码垛位置的空间区域信息,建立所述摆放模型,将所述物品的重心、形状为依据,将所述多个摆放方式输入所述摆放模型中,确定每个摆放方式的稳定性,并选取稳
定性最高作为第一摆放位置,并确定所述第一摆放位置的第一中心坐标;
43.基于所述垂直面,按照同样方式确定第二摆放位置及第二中心坐标;
44.按照所述第一摆放位置将所述物品进行码垛,确定所述物品在所述二坐标系中的第三中心坐标,并判断所述第三中心坐标是否与第二中心坐标一致;
45.若一致,所述第一摆放位置即为所述物品的落点位置;
46.否则,确定所述第二第一摆放位置中所述物品在第一坐标系中的第四中心坐标;
47.基于所述第一中心坐标与第四中心坐标的差异、第三中心坐标与第二中心坐标的差异,对所述第一摆放位置进行修正,得到第三摆放位置即为所述物品的落点位置。
48.在一种可能实现的方式中,
49.基于目标垛型,确定所述物品的摆放方向包括:
50.基于所述码垛位置所在的码垛区域,将所述码垛区域输入垛型匹配模型中,得到目标垛型;
51.基于所述目标垛型,确定所述码垛位置的目标码垛形状;
52.从所述物品的各种摆放方向中选取与所述目标码垛形状最匹配的第一摆放方向,并以所述第一摆放方向,确定当前码垛形状;
53.判断所述当前码垛形状与目标码垛形状的匹配度是否大于预设匹配度;
54.若是,将所述第一摆放方向作为所述物品的摆放方向;
55.否则,确定所述码垛位置不适合对所述物品进行码垛,并选择新的码垛位置。
56.在一种可能实现的方式中,
57.还包括:监测所述码垛机械手在所述目标路径下的移动位置,并对所述移动位置进行实时调整,其步骤如下:
58.基于所述目标路径,生成所述码垛机械手的目标轨迹图;
59.获取所述目标路径的周围环境信息,生成动态环境模型;
60.每隔预设时间获取所述码垛机械手在所述目标路径下的移动位置,并从所述目标轨迹图中获取与所述移动位置相对应的标准位置;
61.判断所述移动位置与所述标准位置是否存在偏差;
62.若不存在,则不对所述码垛机械手的移动轨迹进行调整;
63.若存在,获取所述移动位置与所述标准位置之间的偏差率,并判断所述偏差率是否大于预设偏差率;
64.若是,基于所述偏差率、移动位置、标准位置,生成调整信息,控制所述码垛机械手在移动过程中进行位置调整,重新返回目标路径;
65.否则,启动连续监测所述码垛机械手的位置信息,直到重新返回目标路径,或所述码垛机械手的偏差率大于预设偏差率时,生成调整信息,对所述码垛机械手的位置进行调整;
66.在对所述码垛机械手的在所述目标路径下的移动位置进行监测的同时,对所述动态环境模型进行监测;
67.若监测到所述动态环境模型的变化波动超过预设波动时,基于所述动态环境模型,对所述目标路径进行整体优化,得到新的目标轨迹图;
68.将所述新的目标轨迹图与所述码垛机械手进行关联,生成新的移动指令,并控制
所述码垛机械手按照新的移动指令进行移动;
69.在所述码垛机械手以新的移动指令移动时,以所述新的目标轨迹图为标准进行位置监测和调整。
70.在一种可能实现的方式中,
71.其特征在于,基于所述动态环境模型,可多次对所述目标路径进行整体优化,得到的新的目标轨迹图将覆盖前一次的目标轨迹图。
72.本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
73.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
74.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
75.图1为本发明实施例中一种基于自适应巡航技术的码垛机械手的控制方法的流程图;
76.图2为本发明实施例中确定码垛位置的流程图;
77.图3为本发明实施例中确定移动速度的流程图。
具体实施方式
78.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
79.实施例1
80.本发明实施例提供一种基于自适应巡航技术的码垛机械手的控制方法,如图1所示,包括:
81.步骤1:基于物品的标签信息确定所述物品的码垛位置;
82.步骤2:获取码垛机械手的当前位置,规划所述码垛机械手将物品抓取至码垛位置的目标路径,并利用自适应巡航技术,确定在所述目标路径上的移动速度;
83.步骤3:基于所述码垛位置的空间区域信息,确定所述物品的落点位置。
84.在该实施例中,所述码垛位置包含所述落点位置,落点位置比所述码垛位置更加精确。
85.在该实施例中,所述自适应巡航技术为自动检测在所述目标路径移动过程中的障碍信息,来调节所述码垛机械手的移动速度。
86.在该实施例中,所述目标路径分为两部分,一部分为所述码垛机械手到达所述物品处的第一路径,和所述码垛机械手抓取所述物品到达所述码垛位置的第二路径。
87.上述设计方案的有益效果是:通过利用自适应巡航技术,自适应调节所述码垛机械手的移动速度,使其在不发生碰撞的前提下,更快的实现对物品的码垛,提高码垛效率,并基于所述码垛位置的区域空间信息,确定所述物品的落点位置,提高码垛的精度,更大程度上利用空间位置。
88.实施例2
89.基于实施例1的基础上,本发明实施例提供一种基于自适应巡航技术的码垛机械手的控制方法,所述目标路径包括第一路径和第二路径;
90.其中,所述码垛机械手到达所述物品处的路径为第一路径;
91.所述码垛机械手抓取所述物品到达所述码垛位置的路径为第二路径。
92.上述设计方案的有益效果是:通过将所述目标路径划分为抓取物品前和抓取物品后,对未抓取物品和抓取物品的情况进行区别分析,保证所述目标路径的最优性,提高所述码垛机械手的移动速度,从而提供码垛效率。
93.实施例3
94.基于实施例1的基础上,本发明实施例提供一种基于自适应巡航技术的码垛机械手的控制方法,如图2所示,步骤1中,基于物品的标签信息确定所述物品的码垛位置包括:
95.步骤101,对所述标签信息进行扫描,提取所述标签信息中的文字部分,对所述文字部分进行关键字提取,并确定所述关键字所在的区域;
96.步骤102,根据所述区域所包含的文字,确定所述物品的物流信息,并根据所述物流信息确定所述物品的下一个目的地;
97.步骤103,根据地区存放表,确定所述物品的放置区域,并根据所述放置区域的区域信息,确定码垛位置。
98.在该实施例中,所述关键字例如可以是收件地址。
99.在该实施例中,所述键字所在的区域为地址的具体信息。
100.在该实施例中,所述地区存放表例如可以是太原方向在1号区域、石家庄方向在2号区域。
101.上述设计方案的有益效果是:通过根据物品的物流信息来选择合适的放置位置,方便了对物品的管理。
102.实施例4
103.基于实施例3的基础上,本发明实施例提供一种基于自适应巡航技术的码垛机械手的控制方法,根据所述放置区域的区域信息,确定码垛位置包括:
104.根据所述区域信息建立所述放置区域的空间坐标系,从所述空间坐标系中选择满足所述物品的体积的第一空间位置;
105.根据所述第一空间位置中下方物品的属性信息,从所述第一空间位置中选择满足所述物品的重量的第二空间位置;
106.根据所述第二空间位置的坐标信息,确定所述坐标信息与所述物品的重量和体积的适配度;
107.选择适配度最高的第二空间位置作为码垛位置。
108.在该实施例中,所述下方物品的属性信息包括所述下方物品的品类、体积、重量等,例如所述下方物品的品类食物,而所述物品的重量超过食物的承受范围,则所述第一空间位置不合适放置所述物品。
109.在该实施例中,满足所述物品的体积的第一空间位置的标准例如可以是所述第一空间位置体积是所述物品的体积的两倍。
110.在该实施例中,所述坐标信息与所述物品的重量和体积的适配度例如可以是根据
所述物品的重量和体积在移动过程中最佳空间位置范围,越接近所述最佳空间位置范围,表明适配度越高。
111.上述设计方案的有益效果是:通过考虑所属物品的体积和重量,选择满足要求的空间位置,并根据所属物品的体积和重量在所述码垛机械手下的移动情况,从选择满足要求的空间位置选择最佳空间位置,尽量简化码垛机械手下的移动,提高码垛效率。
112.实施例5
113.基于实施例1的基础上,本发明实施例提供一种基于自适应巡航技术的码垛机械手的控制方法,步骤2中,规划所述码垛机械手将物品抓取至码垛位置的目标路径包括:
114.获取所述码垛机械手移动区域的空间图像,确定所述空间图像中三维坐标系的原点,并建立所述空间图像中各像素点的二维坐标,基于所述原点与其对应的像素点的二维坐标,确定映射关系;
115.基于所述映射关系,确定所述空间图像中各像素点的二维坐标对应三维坐标系的三维坐标;
116.根据图像差分法,提取所述空间图像中的障碍物,并确定所述障碍物的三维坐标;
117.根据所述障碍物的三维坐标,建立障碍物虚拟场景;
118.在所述障碍物虚拟场景下,动态控制所述码垛机械手的移动,根据移动情况,确定目标路径。
119.在该实施例中,根据移动情况,确定目标路径例如可以是根据机械手移动的路程长度、路径复杂度来选择路程长度、路径复杂度相对简单的目标路径。
120.上述设计方案的有益效果是:根据建立障碍物虚拟场景多次模拟移动情况,从中选择最优路径作为目标路径,减少码垛机械手移动方向的改变、和移动路径的长度,从而提高码垛效率。
121.实施例6
122.基于实施例1的基础上,本发明实施例提供一种基于自适应巡航技术的码垛机械手的控制方法,如图3所示,步骤2中,利用自适应巡航技术,确定在所述目标路径上的移动速度包括:
123.步骤201,利用自适应巡航技术,实时监测所述码垛机械手的在目标路径上的当前位置及前方路径情况;
124.步骤202,利用前方位置的情况确定所述码垛机械手的参考速度;
125.所述参考速度的计算公式如下:
[0126][0127]
其中,vc表示所述码垛机械手的参考速度,k1表示所述前方路径的宽度系数,取值为(0.35,0.55),k2表示所述前方路径的空间可用率,取值为(0.45,0.85),k3表示所述前方路径的障碍系数,取值为(0.80,1.00),δ表示监测修正系数,取值为(0.90,1.10),a
x
表示横向加速度,s
x
表示前方路径的横向长度,ay表示纵向加速度,sy表示前方路径的纵向长度;
[0128]
步骤203,根据所述码垛机械手的抓取物品的特征,及所述述码垛机械手的关节角度,以所述参考为基准,确定移动速度;
[0129]
所述移动速度的计算公式如下:
[0130][0131]
其中,v
p
表示所述码垛机械手的移动速度,α表示所述码垛机械手的第一关节角度,取值为β表示所述码垛机械手的第二关节角度,取值为v0表示所述码垛机械手在第一关节角度和第二关节角度下的最佳抓取体积,m0表示所述码垛机械手在第一关节角度和第二关节角度下的最佳抓取重量,用来表示所述码垛机械手的抓取稳定性;
[0132]
步骤204,使所述码垛机械手按照所述移动速度在所述目标路径上移动,当监测到所述码垛机械手的在目标路径上的前方路径情况发生改变时,返回步骤201-203,重新得到新的移动速度。
[0133]
在该实施例中,所述前方路径的宽度系数与宽度值成正比。
[0134]
在该实施例中,所述前方路径的空间可用率表示前方路径的宽敞度,宽敞度越大,间可用率越大。
[0135]
在该实施例中,所述前方路径的障碍系数为其他码垛机械手可能会在某一时段出现在前方路径,对单腔码垛机械手的移动造成影响,影响越大,障碍系数越大,参考速度就越小。
[0136]
在该实施例中,所述横向加速度与纵向加速度为预设加速度,为根据对目标路径的路况,设置的初始加速度。
[0137]
在该实施例中,所述前方路径的横向长度和纵向长度为:若可监测到的前方路径情况一直不发生改变,则前方路径的横向长度和纵向长度为可监测到的长度,若可监测到的前方路径情况发生改变,则前方路径的横向长度和纵向长度为发生改变前的长度,此时得到移动速度不变,改变后的路径情况的移动速度将进行再次计算。
[0138]
在该实施例中,所述码垛机械手有两个关节角度,第一关节角度主要用来控制方向,最佳的角度为第一关节角度主要用来保证抓取稳定性,最佳角度为有利于移动过程中的稳定性和抓取的稳定性,实际的第一关节角度越接近第二关节角度越接近对移动速度的阻碍越小。
[0139]
在该实施例中,对于公式例如可以是k1=0.50,k2=0.50,k3=0.90,δ=1.00,a
x
=5cm/s2,ay=10cm/s2,s
x
=10cm,sy=10cm,则vc=19cm/s。
[0140]
在该实施例中,对于公式在该实施例中,对于公式例如可以是vc=19cm/s,α=30
°
,β=80
°
,v0=4m3,v=3m3,m0=10kg,m=8kg,则v
p
=15cm/s。
[0141]
上述设计方案的有益效果是:通过根据自适应巡航技术监测到的目标路径情况,为所述码垛机械手设置参考速度,再对所述码垛机械手本身的情况分析,以参考速度为基准,进行调整,得到最终的移动速度,从目标路径、码垛机械手两方面分析,得到合适的移动速度,提高码垛效率。
[0142]
实施例7
[0143]
基于实施例1的基础上,本发明实施例提供一种基于自适应巡航技术的码垛机械手的控制方法,步骤3中,基于所述码垛位置的空间区域信息,确定所述物品的落点位置包括:
[0144]
建立所述码垛位置所在水平面、垂直面的第一坐标系和第二坐标系;
[0145]
基于目标垛型,确定所述物品的摆放方向;
[0146]
获取所述物品在水平面的第一平面形状,并根据所述第一平面形状的尺寸确定在所述第一坐标系的可放置位置区域边缘坐标,从所述边缘坐标中选择最靠近临近物品为基准坐标点,将所述基准坐标点作为码垛所述物品的边坐标点,在所述可放置位置区域中确定多个摆放方式;
[0147]
基于所述码垛位置的空间区域信息,建立所述摆放模型,将所述物品的重心、形状为依据,将所述多个摆放方式输入所述摆放模型中,确定每个摆放方式的稳定性,并选取稳定性最高作为第一摆放位置,并确定所述第一摆放位置的第一中心坐标;
[0148]
基于所述垂直面,按照同样方式确定第二摆放位置及第二中心坐标;
[0149]
按照所述第一摆放位置将所述物品进行码垛,确定所述物品在所述二坐标系中的第三中心坐标,并判断所述第三中心坐标是否与第二中心坐标一致;
[0150]
若一致,所述第一摆放位置即为所述物品的落点位置;
[0151]
否则,确定所述第二第一摆放位置中所述物品在第一坐标系中的第四中心坐标;
[0152]
基于所述第一中心坐标与第四中心坐标的差异、第三中心坐标与第二中心坐标的差异,对所述第一摆放位置进行修正,得到第三摆放位置即为所述物品的落点位置。
[0153]
在该实施例中,所述物品的摆放方向具体为所述物品的长、宽、高的选择。
[0154]
在该实施例中,将所述基准坐标点作为码垛所述物品的边坐标点,在所述可放置位置区域中确定多个摆放方式例如可以是所述基准坐标点作为第一平面形状的顶点位置,或者作为第一平面形状的边中点位置,得到不同的摆放方式。
[0155]
在该实施例中,所述基于所述垂直面,按照同样方式为按照所述在水平面上的分析方法,从摆放方式地稳定性确定摆放位置及中心坐标。
[0156]
在该实施例中,若所述第三中心坐标与第二中心坐标不一致,则表明所述第一放置位置和第二放置位置不一致,此时,需要进行修正,使得到的第三放置位置,同时满足水平面和垂直面的中心坐标的要求。
[0157]
上述设计方案的有益效果是:通过根据码垛方向、物品的形状和重心,为物品确定合适的落点位置,既保证了码垛的稳定性,又可以提高码垛的空间利用率。
[0158]
实施例8
[0159]
基于实施例7的基础上,本发明实施例提供一种基于自适应巡航技术的码垛机械手的控制方法,其特征在于,基于目标垛型,确定所述物品的摆放方向包括:
[0160]
基于所述码垛位置所在的码垛区域,将所述码垛区域输入垛型匹配模型中,得到
目标垛型;
[0161]
基于所述目标垛型,确定所述码垛位置的目标码垛形状;
[0162]
从所述物品的各种摆放方向中选取与所述目标码垛形状最匹配的第一摆放方向,并以所述第一摆放方向,确定当前码垛形状;
[0163]
判断所述当前码垛形状与目标码垛形状的匹配度是否大于预设匹配度;
[0164]
若是,将所述第一摆放方向作为所述物品的摆放方向;
[0165]
否则,确定所述码垛位置不适合对所述物品进行码垛,并选择新的码垛位置。
[0166]
上述设计方案的有益效果是:通过对所述码垛位置所在的码垛区域的整体分析,确定合适的目标垛型,并根据目标垛型确定最优的物品码垛方向,以保证码垛的稳定性。
[0167]
实施例9
[0168]
基于实施例1的基础上,本发明实施例提供一种基于自适应巡航技术的码垛机械手的控制方法,还包括:监测所述码垛机械手在所述目标路径下的移动位置,并所述移动位置进行实时调整,其步骤如下:
[0169]
基于所述目标路径,生成所述码垛机械手的目标轨迹图;
[0170]
获取所述目标路径的周围环境信息,生成动态环境模型;
[0171]
每隔预设时间获取所述码垛机械手在所述目标路径下的移动位置,并从所述目标轨迹图中获取与所述移动位置相对应的标准位置;
[0172]
判断所述移动位置与所述标准位置是否存在偏差;
[0173]
若不存在,则不对所述码垛机械手的移动轨迹进行调整;
[0174]
若存在,获取所述移动位置与所述标准位置之间的偏差率,并判断所述偏差率是否大于预设偏差率;
[0175]
若是,基于所述偏差率、移动位置、标准位置,生成调整信息,控制所述码垛机械手在移动过程中进行位置调整,重新返回目标路径;
[0176]
否则,启动连续监测所述码垛机械手的位置信息,直到重新返回目标路径,或所述码垛机械手的偏差率大于预设偏差率时,生成调整信息,对所述码垛机械手的位置进行调整;
[0177]
在对所述码垛机械手的在所述目标路径下的移动位置进行监测的同时,对所述动态环境模型进行监测;
[0178]
若监测到所述动态环境模型的变化波动超过预设波动时,基于所述动态环境模型,对所述目标路径进行整体优化,得到新的目标轨迹图;
[0179]
将所述新的目标轨迹图与所述码垛机械手进行关联,生成新的移动指令,并控制所述码垛机械手按照新的移动指令进行移动;
[0180]
在所述码垛机械手以新的移动指令移动时,以所述新的目标轨迹图为标准进行位置监测和调整。
[0181]
在该实施例中,由于所述码垛机械手在移动过程中会发生抖动,会对所述码垛机械手移动位置产生一定的偏差,所以需要对其进行调整。
[0182]
在该实施例中,若所述移动位置与所述标准位置之间的偏差率不大于预设偏差,表明所述移动位置出现的偏差较小,且有可能在继续的移动过程中消除,所以暂时不需要进行调整,从而减轻工作难度和繁琐度,但需要对其后续的移动进行连续监测。
[0183]
上述设计方案的有益效果是:通过对码垛机械手的移动位置进行监测,并在出现偏差时及时进行调整,避免误差的累积,保证其移动的精确性,同时,并实时监测移动过程中的环境信息,在环境出现较大波动时,及时对整体目标路径进行调整,更好地应对突发情况,提高码垛机械手的智能性,最终,保证码垛效率。
[0184]
实施例10
[0185]
基于实施例9的基础上,本发明实施例提供一种基于自适应巡航技术的码垛机械手的控制方法,基于所述动态环境模型,可多次对所述目标路径进行整体优化,得到的新的目标轨迹图将覆盖前一次的目标轨迹图。
[0186]
上述设计方案的有益效果是:通过多次对目标路径进行优化,保证了码垛机械手的移动效率,保证码垛效率。
[0187]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。