1.本实用新型涉及机械自动化技术领域,尤其涉及一种拆包机械手装置。
背景技术:
2.传统冶金、化工、医药、食品,建筑材料等行业中的,粉体拆包,是由人工拆开后倾倒,不仅劳动强度高,花费时间长,而且扬起的粉尘对人健康造成伤害;或由半人工的简单机械方式拆包倾倒,无法做到、做完,从搬运、拆包、均匀地彻底投放粉料,以及空包脱机、回收的全部机械自动化过程,传统的拆包方式,是效率低下的必然原因。因此本实用提出了一种拆包机械手装置,以解决上述背景技术中提到的问题。
技术实现要素:
3.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种拆包机械手装置。
4.为了实现上述目的,本实用新型采用了如下技术方案:
5.一种拆包机械手装置,包括滑轨和滑座,所述滑座滑动于滑轨内,所述滑座表面固定安装有举升气缸,所述举升气缸上端固定安装有安装板,所述安装板外端上侧固定安装有驱动电机,所述安装板外端下侧固定安装有装置架,所述装置架表面滑动连接有左右两滑块,所述滑块下侧设置有割包片,滑轨内设置有与滑座连接的直线驱动装置,且滑座内设置有与举升气缸固接的转动电机。
6.优选地,所述驱动电机下端固定连接有螺杆,所述螺杆周侧螺纹连接有螺套,所述螺套周侧设置有滑套,且所述滑套两侧与左右两滑块之间均连接有连动杆。
7.优选地,所述滑套上下滑动于螺套周侧,所述螺套上下两端周侧均设置有限位环,且所述滑套上侧设有套设于螺套周侧的弹簧。
8.优选地,所述螺杆下端设置有转动连接于装置架内的转轴,所述转轴左右两端均固定有位于滑套下侧的凸轮,所述螺杆下端固定安装有斜齿轮一,且所述转轴周侧固定安装有与斜齿轮一啮合的斜齿轮二。
9.优选地,所述割包片上侧固定连接有转杆,所述转杆固定于装置架滑块上,且所述转杆与割包片周侧均匀安装有若干倒钩。
10.优选地,所述割包片上端转杆的上端周侧固定安装有直齿轮,且所述装置架下侧安装有对应直齿轮的齿条。
11.相比现有技术,本实用新型的有益效果为:
12.1、本实用新型设计的拆包机械结构,解决了在传统冶金、化工、医药、食品、建筑材料等行业中,粉体拆包靠人工或半机械来完成,劳动强度大,影响工人健康的问题,而且因为采用了智能控制机械自动化的方案,非常显著地提高了工作效率;
13.2、本实用新型设置的倒钩对包装袋进行缠绕固定,使得包装袋不会轻易从装置上掉落,方便放料吗,设置的滑动在螺套周侧的滑套,通过装置架内传动结构使得凸轮转动,
进而控制纠缠在包装带两端的割包结构反复张紧放松,能够使残留在包装带内的粉料完全进入料池内,进而避免粉料的浪费。
附图说明
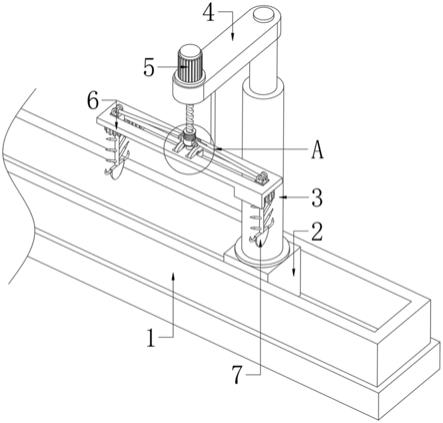
14.图1为本实用新型提出的一种拆包机械手装置的结构示意图一;
15.图2为本实用新型提出的一种拆包机械手装置的结构示意图二;
16.图3为本实用新型提出的一种拆包机械手装置中图1的a处放大结构示意图;
17.图4为本实用新型提出的一种拆包机械手装置中割包片的连接结构示意图;
18.图5为本实用新型提出的一种拆包机械手装置中凸轮的连接结构示意图。
19.图中:1、滑轨;2、滑座;3、举升气缸;4、安装板;5、驱动电机;6、装置架;7、割包片;8、螺杆;9、齿条;10、齿轮;11、凸轮;12、螺套;13、滑套;14、弹簧;15、连动杆;16、倒钩;17、斜齿轮一;18、斜齿轮二。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
21.参照图1-5,一种拆包机械手装置,包括滑轨1和滑座2,滑座2滑动于滑轨1内,滑座2表面固定安装有举升气缸3,举升气缸3上端固定安装有安装板4,滑轨1内设置有与滑座2连接的直线驱动装置,且滑座2内设置有与举升气缸3固接的转动电机,本装置需要外接控制器对滑轨1内的直线驱动装置、滑座2内的转动电机、安装板4上的驱动电机5进行控制操作,在使用本拆包机械手装置时,通过滑轨1内的直线驱动装置控制滑座2上的拆包装置进行移动,寻找粉料池内的料包进行拆包;
22.进一步的是,安装板4外端上侧固定安装有驱动电机5,安装板4外端下侧固定安装有装置架6,装置架6表面滑动连接有左右两滑块,滑块下侧设置有割包片7,割包片7上侧固定连接有转杆,转杆固定于装置架6滑块上,且转杆与割包片7周侧均匀安装有若干倒钩16,割包片7上端转杆的上端周侧固定安装有直齿轮10,且装置架6下侧安装有对应直齿轮10的齿条9;
23.更进一步的是,驱动电机5下端固定连接有螺杆8,螺杆8周侧螺纹连接有螺套12,螺套12周侧设置有滑套13,且滑套13两侧与左右两滑块之间均连接有连动杆15,通过举升气缸3控制安装板4一端安装的拆包机械手装置下移,在寻找到拆包的料包后,装置下侧的割包片7插入料包内,通过驱动电机5控制螺杆8转动,由于受到两侧连动杆15的转动限制,转动的螺杆8使得螺纹连接在其周侧的螺套12下移,而随着螺套12的下移,通过两侧连动杆15的传动,滑动在装置架6两侧的滑块向外滑移,而安装在其下侧的割包片7也随之移动,随着两侧割包片7的移动,料包被拆开,直至装置架6上的两侧滑块移至最外端过程中,割包片7上端转杆的上端直齿轮10与装置架6下侧对应的齿条9啮合,使得转杆下端割包片7及转杆周侧若干倒钩16跟随转动,配合倒钩16对包装袋进行缠绕固定,使得包装袋不会轻易从装置上掉落,方便放料;
24.更进一步的是,滑套13上下滑动于螺套12周侧,螺套12上下两端周侧均设置有限
位环,且滑套13上侧设有套设于螺套12周侧的弹簧14,螺杆8下端设置有转动连接于装置架6内的转轴,转轴左右两端均固定有位于滑套13下侧的凸轮11,螺杆8下端固定安装有斜齿轮一17,且转轴周侧固定安装有与斜齿轮一17啮合的斜齿轮二18,随着料包的拆包,螺杆8周侧的螺套12下移至最下端,而在螺杆8转动的同时,其下端相互啮合的斜齿轮一17与斜齿轮二18,使得转轴两端凸轮11转动,转动的凸轮11使得滑动在螺套12周侧的滑套13上移,当凸轮11转动平时,滑套13受到螺套12周侧弹簧14的弹力作用,又回到螺套12周侧下端位置,就这样循环往复,使得连动杆15两端连接的滑块小幅度左右摆动,滑块下端割包片7跟随摆动,纠缠在包装带两端的割包结构反复张紧放松,能够使残留在包装带内的粉料完全进入料池内,进而避免粉料的浪费。
25.本实用新型具体工作原理如下:
26.本装置需要外接控制器对滑轨1内的直线驱动装置、滑座2内的转动电机、安装板4上的驱动电机5进行控制操作;
27.在使用本拆包机械手装置时,通过滑轨1内的直线驱动装置控制滑座2上的拆包装置进行移动,寻找粉料池内的料包进行拆包;
28.通过举升气缸3控制安装板4一端安装的拆包机械手装置下移,在寻找到拆包的料包后,装置下侧的割包片7插入料包内,通过驱动电机5控制螺杆8转动,由于受到两侧连动杆15的转动限制,转动的螺杆8使得螺纹连接在其周侧的螺套12下移,而随着螺套12的下移,通过两侧连动杆15的传动,滑动在装置架6两侧的滑块向外滑移,而安装在其下侧的割包片7也随之移动,随着两侧割包片7的移动,料包被拆开;
29.直至装置架6上的两侧滑块移至最外端过程中,割包片7上端转杆的上端直齿轮10与装置架6下侧对应的齿条9啮合,使得转杆下端割包片7及转杆周侧若干倒钩16跟随转动,配合倒钩16对包装袋进行缠绕固定,使得包装袋不会轻易从装置上掉落,方便放料;
30.随着料包的拆包,螺杆8周侧的螺套12下移至最下端,而在螺杆8转动的同时,其下端相互啮合的斜齿轮一17与斜齿轮二18,使得转轴两端凸轮11转动,转动的凸轮11使得滑动在螺套12周侧的滑套13上移,当凸轮11转动平时,滑套13受到螺套12周侧弹簧14的弹力作用,又回到螺套12周侧下端位置,就这样循环往复,使得连动杆15两端连接的滑块小幅度左右摆动,滑块下端割包片7跟随摆动,纠缠在包装带两端的割包结构反复张紧放松,能够使残留在包装带内的粉料完全进入料池内,进而避免粉料的浪费;
31.在完全将纠缠的包装带内的粉料倾倒出来后,举升气缸3控制安装板4及拆包结构上移,滑座2内的转动电机控制举升气缸3连同安装板4、拆包结构转动角度,将纠缠的包装袋取下,进而进行下一轮的粉料包拆包。
32.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。