1.本发明涉及一种用于在存储网格中存储和取回容器(container,集装箱)的自动存储和取回系统,特别涉及一种包括屏障的自动存储和取回系统,该屏障物理上阻止运载工具在存储网格的第一部分和第二部分之间移动。
背景技术:
2.图1公开了具有框架结构100的典型的现有技术的自动存储和取回系统1,图2和图3公开了适用于在这样的系统1上操作的两个不同的现有技术的容器搬运运载工具201,301。
3.框架结构100包括直立构件102、水平构件103和存储体积,该存储体积包括在直立构件102和水平构件103之间成行布置的存储列105。在这些存储列105中,存储容器106,也称为仓,一个叠一个地堆叠以形成堆叠107。构件102,103通常可由金属制成,例如挤压铝型材。
4.自动存储和取回系统1的框架结构100包括横过框架结构100的顶部布置的轨道系统108,在该轨道系统108上操作多个容器搬运运载工具201,301,以从存储列105升起存储容器106和将存储容器106下降到存储列105中,并且也将存储容器106运输到存储列105上方。轨道系统108包括第一组平行轨道110,其被布置为引导容器搬运运载工具201,301沿第一方向x穿过框架结构100的顶部移动;以及垂直于第一组轨道110布置的第二组平行轨道111,以引导容器搬运运载工具201,301在垂直于第一方向x的第二方向y上移动。容器搬运运载工具通过轨道系统108中的存取口112存取存储在列105中的容器106。容器搬运运载工具201、301可以在存储列105的上方横向移动,即在平行于水平x-y平面的平面内移动。
5.框架结构100的直立构件102可用于在容器从列105上升和下降到列105中的过程中引导存储容器。容器106的堆叠107通常是自支撑的。
6.每个现有技术的容器搬运运载工具201,301包括车身201a,301a,以及第一组和第二组车轮201b,301b,301b,201c,301c,它们使得容器搬运运载工具201,301能够分别在x方向和y方向上横向移动。在图2和3中,每组中的两个车轮是完全可见的。第一组车轮201b,301b布置为与第一组轨道110的两个相邻轨道接合,第二组车轮201c,301c布置为与第二组轨道111的两个相邻轨道接合。车轮组201b,301b,201c,301c中的至少一个可被升高和降低,使得第一组车轮201b,301b和/或第二组车轮201c,301c可在任何一次与相应的一组轨道110,111接合。
7.每个现有技术的容器搬运运载工具201,301还包括用于垂直运输存储容器106的提升装置(未示出),例如从存储列105中升高存储容器106和将存储容器106降低到存储列105中。提升装置包括一个或多个夹持/接合装置,其适于接合存储容器106,并且该夹持/接合装置可从运载工具201,301放下,这样就可在与第一方向x和第二方向y正交的第三方向z上调整夹持/接合装置相对于运载工具201,301的位置。容器搬运运载工具301的夹持装置的部分在图3中示出,用附图标记304表示。容器搬运装置201的夹持装置位于图2中的车身
301a内。
8.常规地,并且也出于本技术的目的,z=1表示存储容器的最上层,即紧接轨道系统108下面的层,z=2表示轨道系统108下面的第二层,z=3表示第三层,等等。在图1中公开的示例性现有技术中,z=8表示存储容器的最下层。类似地,x=l...n和y=l...n表示每个存储列105在水平面内的位置。因此,作为示例,使用图1中指示的笛卡尔坐标系x,y,z,在图1中标识为106’的存储容器可以说占据存储位置x=10,y=2,z=3。可以说,容器搬运运载工具201,301在层z=0中行驶,并且每个存储列105'可以通过其x和y坐标来识别。
9.框架结构100的存储体积通常被称为网格104,其中该网格内的可能的存储位置被称为存储单元。每个存储列可以通过x和y方向上的位置来标识,而每个存储单元可以通过x方向、y方向和z方向上的容器号来标识。
10.每个现有技术的容器搬运运载工具201,301都包括存储室或空间,当在轨道系统108上运输存储容器106时,该存储室或空间用于容纳和存放存储容器106。存储空间可包括居中布置在车身201a内的空腔,如图2所示,并且例如wo2015/193278a1所述,其内容通过引用并入本文。
11.图3示出了具有悬臂结构的容器搬运运载工具301的替代配置。例如,在no317366中详细描述了这种运载工具,其内容也通过引用并入本文。
12.图2所示的中央空腔容器搬运运载工具201可具有覆盖在x和y方向上具有尺寸的区域的占地面积,其通常等于存储列105的横向范围,例如,如wo2015/193278a1中所述,其内容通过引用并入本文。这里使用的术语“横向”可以指“水平”。
13.可替代地,中央空腔容器搬运运载工具101可具有大于由存储列105限定的横向区域的占地面积,例如,如在wo2014/090684a1中公开的。
14.轨道系统108通常包括带有槽的轨道,运载工具的车轮在槽中行驶。可替代地,轨道可以包括向上突出的元件,其中运载工具的车轮包括法兰以防止脱轨。这些槽和向上突出的元件统称为导轨。每个轨道可以包括一个导轨,或者每个轨道可以包括两个平行导轨。
15.wo2018146304,其内容通过引用并入本文,示出了轨道系统108的典型配置,该轨道系统包括在x和y方向上的轨道和平行导轨。
16.在框架结构100中,大多数列105是存储列105,即在其中将存储容器106存储在堆叠107中的列105。然而,一些列105可能具有其他目的。在图1中,列119和120是容器搬运运载工具201,301用来卸下和/或拾取存储容器106的专用列,以便可将它们运输到可从网格100的外部存取存储容器106或将其从网格100移除或移进网格104的存取站(未示出)。在本领域内,这样的位置通常称为“端口”,并且端口位于其中的列可称为“端口列”119,120。到存取站的运输可以是在任何方向上,即水平的、倾斜的和/或垂直的。例如,存储容器106可以放置在框架结构100内的随机或专用列105中,然后由任何容器搬运运载工具拾取并运输到端口列119、120,以便进一步运输到存取站。注意,术语“倾斜”是指具有在水平和垂直之间某处的一般运输方向的存储容器106的运输。
17.在图1中,例如,第一端口列119可以是专用的卸货端口列,其中容器搬运运载工具201,301可以卸下要运输到存取站或转运站的存储容器106,并且第二端口列120可以是专用的卸货端口列,其中容器搬运运载工具201,301可以从存取站或转运站拾取已经运输的存储容器106。
18.存取站通常可以是从存储容器106中取出产品或将产品放置到存储容器6中的拾取或存储站。在拾取或存储站中,存储容器106通常不从自动存储和取回系统1中移除,而是一旦被存取就再次返回到框架结构100中。端口还可以用于将存储容器转移到另一存储设施(例如到另一框架结构或到另一自动存储和取回系统)、运输运载工具(例如火车或卡车)或生产设施。
19.通常采用包括输送机的输送机系统在端口列119、120和存取站之间运输存储容器。
20.如果端口列119、120和存取站位于不同的水平,则输送机系统可以包括具有垂直部件的提升装置,用于在端口列119、120和存取站之间垂直地运输存储容器106。
21.输送机系统可被布置成在不同框架结构之间传送存储容器106,例如,如wo2014/075937a1中所述,其内容通过引用并入本文。
22.当要存取存储在图1中公开的列105的一个中的存储容器106时,将指示其中一个容器搬运运载工具201,301从目标存储容器106的位置取回目标存储容器106并将其运输到卸货端口列119。此操作涉及将容器搬运运载工具201,301移动到目标存储容器106所在的存储列105上方的位置,使用容器搬运运载工具201,301的提升装置(未显示)从存储列105取回存储容器106,并将存储容器106运送到卸货端口列119。如果目标存储容器106位于堆叠107的深处,即一个或多个其他存储容器106位于目标存储容器106上方,该操作还涉及在从存储列105中提升目标存储容器106之前临时移动放置在上方的存储容器。该步骤在本领域中有时被称为“挖掘”,该步骤可用随后用于将目标存储容器运输到卸货端口列119的同一容器搬运运载工具,或者通过一个或多个其他合作的容器搬运运载工具来执行。
23.替代地或另外地,自动存储和取回系统1可具有专门用于临时从存储列105移除存储容器的任务的容器搬运运载工具。一旦目标存储容器106已经从存储列105中移除,可将临时移除的存储容器重新放置到原始存储列105中。但是,可替换地,移除的存储容器能够重定位到其他存储列。
24.当将存储容器106存储在列105的一个中时,指示容器搬运运载工具201,301之一从拾取端口列120拾取存储容器106并将其运输到它要被存储的存储列105上方的位置。在移除位于存储列堆叠107内的目标位置处或目标位置之上的任何存储容器之后,容器搬运运载工具201,301将存储容器106定位在期望位置。然后,可将移除的存储容器降低回存储列105中,或重新放置到其他存储列中。
25.为了监视和控制自动存储和取回系统1,例如监视和控制框架结构100内各个存储容器106的位置,每个存储容器106的内容;以及容器搬运运载工具201,301的移动,以便可在所需时间将所需的存储容器106运送到所需位置,而不会使容器搬运运载工具201,301相互碰撞,自动存储和取回系统1包括控制系统500,通常将其计算机化,并且通常包括用于跟踪存储容器106的数据库。
26.与已知的自动存储和取回系统1相关联的问题是,人员进入轨道系统108以执行检查、或执行维护、或移除故障容器搬运运载工具是具有挑战性的。
27.维护或移除故障运载工具的另一个重要问题是,需要系统1的完全关闭,以便人员以低或零伤害风险进入。特别是对于大型系统1,例如同时运行的运载工具超过500辆的系统1,由于运营商的巨大成本,完全关闭是非常不希望的。
28.本发明的一个目的是提高上述类型的自动存储和取回系统的效率。本发明的另一个目的是提高维护和修理操作期间的安全性,并提高这种维护和修理操作期间的效率。
技术实现要素:
29.本发明涉及一种自动存储和取回系统,包括:
[0030]-用于存放存储容器的三维的存储网格;
[0031]-第一和第二容器搬运运载工具,其在存储网格上操作;
[0032]-中央通信系统,用于控制容器搬运运载工具并与其通信,以搬运存储网格中的存储容器;其特征在于:
[0033]-自动存储和取回系统包括将三维的存储网格分隔成第一部分和第二部分的屏障;
[0034]-屏障有两种状态:第一状态,其中,允许容器搬运运载工具在第一部分和第二部分之间移动;以及第二状态,其中,借助于屏障物理上阻止容器搬运运载工具在第一部分和第二部分之间移动。
[0035]
因此,本发明提供了一种自动存储和取回系统,该系统具有通过展开屏障和通过协调容器搬运运载工具的移动的中央通信系统将存储网格的工作区域分割成分离区域的能力。以这种方式,可以为操作人员提供存储网格上的安全环境以接近故障,其中安全环境没有移动的容器搬运运载工具。
[0036]
在一个方面,中央通信系统被配置为与屏障一起操作,以在存储网格上提供一个没有移动的容器搬运运载工具的保护区域,以允许操作者纠正该保护区域中的故障状况。
[0037]
在一个方面,三维的存储网格包括沿其边界设置在存储网格上方的栅栏。
[0038]
这里的术语安全区域是指具有预定义的安全和/或安全规定的区域,其中在保护区域中可以允许某些动作而在其他区域中不允许相同的动作。
[0039]
在一个方面,该系统包括用于在其第一和第二状态之间移动屏障的致动器;其中,中央通信系统被配置为控制致动器。
[0040]
在一个方面,中央通信系统被配置为:
[0041]-当屏障处于第一状态时,检测第一或第二部分中的一个中是否存在故障状况;
[0042]-控制所有正在运行的容器搬运运载工具离开其中存在故障状况的部分;
[0043]-控制致动器将屏障移动到第二状态。
[0044]
随着所有其他容器搬运运载工具离开其中存在故障状况的部分,现在工作人员可以安全地纠正故障状况,因为其他容器搬运运载工具被物理上阻止移动到或靠近故障状况的位置。
[0045]
在一个方面,当故障状况已经被纠正时,中央通信系统被配置为控制致动器将屏障再次移动到其第一状态,并允许容器搬运运载工具移动到其中曾存在故障状况的部分中。中央通信系统还可以被配置为控制容器搬运运载工具,以便它们进入先前存在故障的部分。
[0046]
因此,在修理和/或取回期间,其他运载工具可以在不存在故障状况的部分中执行它们的正常运行。因此,提高了效率,因为将允许一些运载工具在所有时间运行,一个例外是所有部分同时存在故障状况的情况。
[0047]
在一个方面,故障状况可以是故障运载工具。在一个方面,故障状况可以是定位错误的存储容器。在一个方面,故障状况可以是定位错误的产品项。在一个方面,可以自动检测故障状况,并将指示存在故障状况的信号自动发送到中央通信系统。该信号可以包括故障状况的位置。该位置可以包括其中已经检测到故障状况的存储网格的部分。可替代地,可以由人手动给出信号。
[0048]
在一个方面,这些部分基本上具有相同的尺寸。
[0049]
在一个方面,屏障在第一和第二部分之间定义了分离边界。在一个方面,分离边界是线性的。在一个方面,分离边界位于两行存储列之间。
[0050]
在一个方面,当屏障处于第一状态时,可以将屏障从初始位置移动到后续位置,其中,处于初始位置的第一和第二部分不同于处于新位置的第一和第二部分。
[0051]
因此,如果初始位置的第一部分和第二部分之间的边界处存在故障状况,故障状况可能会阻碍屏障移动到其第二状态。通过将屏障本身移动到新的位置,故障状况不再是屏障的障碍。
[0052]
根据以上所述,可以实现分离边界的移动。
[0053]
在一个方面,当屏障从其第一状态移动到其第二状态时,致动器足够强大以将容器搬运运载工具推入第一部分或第二部分。
[0054]
在一个方面,在第一状态下,屏障设置在运载工具行驶水平的上方或下方的位置上,并且在第二状态下,屏障设置在运载工具行驶水平上。
[0055]
在一个方面,屏障包括可卷起类型的屏障、可折叠类型的屏障、滑动类型的屏障、线性移动类型的屏障或可枢转类型的屏障。
[0056]
在一个方面,该系统进一步包括设置在存储网格上方的通道,其中屏障悬挂在通道下方。
[0057]
在一个方面,屏障悬挂在存储网格上方的不同类型的结构上,例如存储网格所在的建筑物的天花板、用于天花板的支撑梁等。
[0058]
在一个方面,存储网格包括一个连续框架结构,该框架结构包括直立构件和水平构件,其中,存储容器被存储在设置在构件之间的存储列中;一个连续框架结构包括轨道,用于在它们在存储网格上运行期间以及在它们在第一部分和第二部分之间移动期间引导运载工具。
[0059]
在一个方面中,屏障可以包括物理屏障,该物理屏障具有在第一状态下设置在运载工具行驶水平下方的运载工具停止元件的形式,其中,柱在第二状态下被提升到运载工具行驶水平。
[0060]
运载工具停止元件可包括柱、杆等。
[0061]
在一个方面,运载工具停止元件可借助于线性致动器线性移动。在一个方面,运载工具停止柱可借助于旋转致动器枢转移动。
[0062]
在一个方面,屏障可移动地连接到直立构件或水平构件,其中,在第一状态下,屏障竖直地位于导轨下方。
[0063]
在一个方面,容器搬运运载工具包括具有运载工具发射器和运载工具接收器的运载工具通信系统,用于与中央通信系统和/或其它容器搬运运载工具通信。
[0064]
在一个方面,运载工具通信系统的运载工具发射器和运载工具接收器被配置为传
送指令以打开或关闭屏障。
[0065]
在一个方面,该系统和运载工具发射器和接收器被配置为使用光进行无线通信,并且其中,系统发射器和系统接收器位于自动存储系统中的存储网格上、周围或下面。
[0066]
本发明还涉及一种用于纠正自动存储和取回系统中的故障状况的方法,其中,自动存储和取回系统包括:三维网格,用于存放存储容器;第一和第二容器搬运运载工具,其在存储网格上操作;以及具有系统发射器和系统接收器的中央通信系统,用于控制至少一个容器搬运运载工具并与其通信;其特征在于,该方法包括:
[0067]-定义三维的存储网格,其具有第一部分和与第一部分分开的第二部分;
[0068]-在两个状态之间控制自动存储和取回系统的屏障:第一状态,其中,允许容器搬运运载工具在第一部分和第二部分之间移动;以及第二状态,其中,借助于屏障物理上阻止容器搬运运载工具在第一部分和第二部分之间移动。
[0069]
在一个方面,该方法进一步包括:
[0070]-当屏障处于其第一状态时,检测在第一或第二部分中的一个中是否存在故障状况;
[0071]-控制所有正在运行的容器搬运运载工具离开其中存在故障状况的部分;
[0072]-控制屏障处于其第二状态。
[0073]
在一个方面,该方法包括以下步骤:
[0074]-当屏障处于第一状态时,将屏障从初始位置移动到后续位置,其中,处于初始位置的第一和第二部分不同于处于新位置的第一和第二部分。
[0075]
在一个方面,该方法包括以下步骤:
[0076]-借助于屏障将容器搬运运载工具推入第一部分或推入第二部分。
附图说明
[0077]
附上以下附图以促进对本发明的理解;附图示出了本发明的实施方式,现在仅以示例的方式对其进行描述,其中:
[0078]
图1是现有技术的自动存储和取回系统的框架结构的透视图。
[0079]
图2是现有技术的容器搬运运载工具的透视图,其具有在中央布置的用于在其中携带存储容器的空腔。
[0080]
图3是现有技术的容器搬运运载工具的透视图,其具有用于在下面携带存储容器的悬臂。
[0081]
图4示意性地示出了三个独立存储网格的侧视图。
[0082]
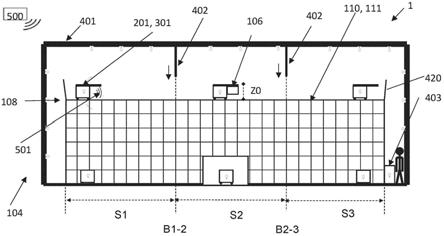
图5示意性地示出了分成三个部分的一个存储网格的侧视图。
[0083]
图6示出了具有第一类型屏障装置的存储网格的第一实施例。
[0084]
图7示出了图6中所示的第一类型屏障装置的放大图。
[0085]
图8a和8b示出了连接到存储网格的框架结构的枢转移动类型的屏障装置的第一和第二状态。
[0086]
图9a和9b示出了连接到存储网格的框架结构的线性移动类型的屏障装置的第一和第二状态。
[0087]
图10a和10b示出了水平移动屏障的第一和第二状态。
[0088]
图11a和11b示出向上枢转的屏障的第一和第二状态。
[0089]
图12a示出了由增强织物或包含增强元件的织物制成的可卷起的帘形式的垂直可移动的屏障装置。
[0090]
图12b示出了类似于百叶窗或褶皱窗的垂直可移动的屏障装置。
[0091]
图12c示出了悬挂在电线中的工字形梁形式的垂直可移动屏障装置。
[0092]
图12d示出了可水平移动的铰接面板壁。
[0093]
图12e示出了可水平滑动的面板壁。
具体实施方式
[0094]
在下文中,将参考附图更详细地讨论本发明的实施例。然而,应当理解,附图并非旨在将本发明限制于附图中描绘的主题。
[0095]
自动存储和取回系统1的框架结构100根据上面结合图1至3描述的现有技术框架结构100构造,即,多个直立构件102和多个水平构件103,它们由直立构件102支撑,并且进一步地,框架结构100包括第一、上轨道系统108,该轨道系统具有在x方向和y方向上的轨道110、111。
[0096]
框架结构100进一步包括设置在构件102、103之间的存储列105形式的存储室,其中存储容器106可在储存列105内堆叠成堆叠107。
[0097]
框架结构100可以是任何尺寸。具体地,应当理解,框架结构可以比图1中公开的更宽和/或更长和/或更深。例如,框架结构100可以具有超过700
×
700列的水平范围和超过12个容器的存储深度。
[0098]
图4是实施例的侧视图,其中,中央通信系统500使用光作为存储系统1中的通信介质。
[0099]
存储系统1包括至少一个用于运输容器106的容器搬运运载工具201、301、404。这些容器搬运运载工具201、301、404可以是运载工具201、301,在存储网格104的顶部移动,将容器106提升出网格104,但也可以是远程操作的传送运载工具404,用于在存储网格104和例如用于搬运存储容器106的端口403之间运输存储容器106。系统1进一步包括中央通信系统500,用于向系统1的所有部分传送信息。系统1还可以包括至少一个端口403,容器被运输到该端口,并且从容器中拾取相关物品用于运输。在拾取相关物品之后,容器106被送回容器搬运运载工具201、301、404,以便运输回存储网格104。此外,系统1可以包括一个或多个分隔存储网格104的部分的屏障402。系统1还可以包括其他部分。
[0100]
在本发明的优选实施例中,中央通信系统500经由多个发射器401向存储系统1的不同部分传送信息。这些发射器401使用光作为通信介质。发射器401位于容纳存储系统1的设施中存储网格104周围,以确保存储系统1的所有区域在至少一个发射器401的视线内。
[0101]
发射器401可以是用于发射信息的led灯的形式。相机可以用于接收信息。然而,可以使用任何其他形式的以光作为通信介质的发送和接收信息的设备。
[0102]
在本发明中提出的使用光作为通信介质的解决方案中,发射器401和接收器必须在彼此的视线内。因此,在大型存储设施中,可能需要使用分布在容纳存储系统1的设施中的多个发射器401和接收器,以便覆盖存储系统1的所有区域。
[0103]
如果容器搬运运载工具的所有发射器和接收器不能经由光信号通信,则该容器搬
运运载工具自动前往服务站。可替代地,容器搬运运载工具201、301、404可以具有备用通信系统。这个备用通信系统可以是wi-fi。如果使用光作为通信介质的通信系统由于某种原因发生故障,则wi-fi系统可以接管与中央通信系统500的通信。
[0104]
在又一替代解决方案中,中央通信系统500和存储系统1的其余部分之间的通信可以通过使用光和wi-fi两者作为通信信道来进行。作为通信介质的光可用于从中央通信系统500到运载工具、端口和屏障以及从运载工具、端口和屏障到中央通信系统500的wi-fi的通信。
[0105]
为了防止光干扰,存储系统1可以划分为部分。这些部分可以用挡光的分隔物隔开。这些分隔物可以是帘、屏风或屏障,在需要时可以升高或降低。这使得可以将一个部分中的通信与其余部分分开。一个这样的部分可以是与其他网格分离的一个网格或与网格的其余部分分离的网格的一部分。存储网格可以分成几个这样的部分。
[0106]
这样做的好处是,其使在网格上对容器搬运运载工具进行维护变得更加容易。此外,这些部分可以是火灾时的保护区。使用光作为通信手段的另一个好处是,当需要在整个存储系统上紧急停止时,它更安全。由于wi-fi容易受到来自存储系统1外部信号的干扰,因此存在干扰可能导致容器搬运运载工具进行意外操作的机会。在阻挡来自外部的光干扰的存储系统1中使用光作为通信手段,容器搬运运载工具的意外操作的机会几乎减少到零。
[0107]
此外,通过将存储网格分成可以阻止与部分外部通信的部分,可以更容易地确保在特定部分中的容器搬运运载工具关闭,或者可替代地,在存储系统1的其余部分被关闭的同时,在部分中的容器搬运运载工具被操作。
[0108]
图5示出了本发明的实施例。这里,可以使用其他类型的通信替代图4中用作介质的光。因此,可以使用诸如基于无线电的通信的电磁通信。当今的存储系统中通常使用几种类型的这种电磁通信,在此将不进一步详细讨论。
[0109]
中央通信系统500与控制系统连接或集成,以操作自动存储和取回系统1。因此,在附图中,中央通信系统和控制系统通常被称为附图标记500。
[0110]
在图5中,有一个大的三维网格104,被分成第一部分s1、第二部分s2和第三部分s3。第一边界b1-2分隔第一部分s1和第二部分s2。第二边界b2-3分隔第二部分s2和第三部分s3。
[0111]
有一个共轨系统108,该共轨系统具有用于存储网格104的顶部的轨道110、111,用于在运载工具201、301在存储网格104上的操作期间以及在运载工具201、301在部分s1、s2、s3之间的移动期间引导运载工具201、301。
[0112]
图5的自动存储和取回系统1包括两个屏障402。屏障402具有两种状态:第一状态,其中,允许容器搬运运载工具201、301在部分s1、s2、s3之间移动;以及第二状态,其中,借助于屏障402物理上阻止容器搬运运载工具201、301在部分s2、s2、s3之间移动。应当注意,可以独立地控制屏障402。
[0113]
因此,如果左屏障处于第二状态并且右屏障处于第一状态,运载工具可以在第二部分s2和第三部分s3之间移动,但不能在第一部分s1和第二部分s2之间移动。
[0114]
因此,当所有屏障402处于第一状态时,容器搬运运载工具201、301可以在整个网格104上操作,就好像根本没有定义任何部分一样。
[0115]
然而,当屏障402处于第二状态时,第一部分s1提供第一保护区域,第二部分s2提
供第二保护区域,并且第三部分s3提供第三保护区域,所有保护区域彼此分开。因此,可能在一个保护区域允许某些动作,而在其他保护区域不允许相同的动作。
[0116]
系统1进一步包括致动器m,用于在屏障的第一和第二状态之间移动屏障402。优选地,中央通信系统500被配置为控制致动器m。致动器m可以是电动机、电动和/或液压致动器等,并被认为是本领域技术人员已知的。
[0117]
在图5、6和7中,屏障402是可卷起类型的屏障,其形式为帘,类似于通常用于体育馆中以将大厅分隔成较小的大厅部分的隔离墙。这种类型的可卷起屏障也在图12a中示出。帘可以由增强织物或包含增强元件的织物制成。
[0118]
图12b中示出了一个替代方案,其示出了类似于百叶窗或褶皱窗的垂直可移动的屏障装置。图12c中示出了另一种替代方案,其中屏障包括梁,例如借助于导线悬挂的i型梁或h型梁。
[0119]
在图5中,示出了运载工具在指示运载工具高度的运载工具行驶水平z0中移动。上述屏障402在第一状态下悬挂在运载工具行驶水平z0之上。在第二状态中,将屏障移动到该运载工具行驶水平z0,以物理上阻止运载工具在部分s1、s2、s3之间移动。
[0120]
在图6和7中,屏障402悬挂在通道410下方,通道用作人从网格的一侧走到网格的另一侧的捷径。可替代地,屏障402可以悬挂在存储网格上方的不同类型的结构上,例如存储网格所在的建筑物的天花板、用于天花板的支撑梁等。
[0121]
在图12d中,示出了水平可移动的铰接面板壁形式的替代屏障402。这里,屏障402在第一状态下将设置在运载工具行驶区域z0的一侧,并且在第二状态下将滑动或以其他方式侧向移动到运载工具行驶区域z0中。
[0122]
在图12e中,示出了可滑动面板壁402a形式的替代屏障402。可滑动面板壁402a与网格结构上方的轨道403b可滑动地接合并悬挂在轨道403b上。可滑动面板壁402a也可与容器搬运运载工具使用的轨道110、111可滑动地接合。沿着两个区域s1、s2之间的边界可以存在多个彼此相邻的这样的面板壁。
[0123]
现在参考图8a和8b。这里,屏障402包括多个可枢转的运载工具停止元件412,该运载工具停止元件在第一状态下设置在运载工具行驶区域z0的下方,并且在第二状态下向上枢转到运载工具行驶区域z0中。
[0124]
现在参考图9a和9b。这里,屏障402包括多个线性移动的运载工具停止元件412,该运载工具停止元件在第一状态下设置在运载工具行驶区域z0的下方,并且在第二状态下垂直向上布置到运载工具行驶区域z0中。
[0125]
上述运载工具停止元件412不需要与运载工具或运载工具行驶区域z0一样高,只要它们足够高和坚固以物理上阻止运载工具在两个部分之间移动即可。运载工具停止元件412可包括柱、杆等。
[0126]
上述运载工具停止元件412沿着部分s1、s2、s3之间的第一边界b1-2和/或第二边界b2-3设置。通常,对于每个存储列105将有一个运载工具停止元件412。
[0127]
现在参考图13a和13b。这里,替代运载工具停止元件412被示出为可枢转地连接到框架结构100的直立构件102。运载工具停止元件在这里是l形的,这使得能够在第一状态下将元件竖直地设置在轨道110、111下方,并且仍然能够使运载工具停止元件向上枢转并进入运载工具行驶水平z0。
[0128]
以这种方式,屏障402可以被改造成现有的存储网格104,并且因此存储网格可以具有相同数量的列,而存储网格没有任何水平延伸。
[0129]
操作
[0130]
下面将进一步详细描述屏障402的操作。
[0131]
如果在部分s1、s2、s3中的一个中存在故障状况,则将使用屏障402。然后,中央通信系统500将控制所有正在运行的容器搬运运载工具201、301离开其中存在故障状况的部分,然后控制致动器m将屏障402移动到其第二状态,以便将故障状况隔离到其中一个部分。
[0132]
随着所有其他容器搬运运载工具201、301离开其中存在故障状况的部分,现在工作人员可以安全地纠正故障状况,因为其他容器搬运运载工具被物理上阻止移动到或靠近故障状况的位置。
[0133]
当故障状况已经被纠正时,中央通信系统500被配置为控制致动器m将屏障402再次移动到其第一状态,并允许容器搬运运载工具201、301移动到其中曾存在故障状况的部分s1、s2中。
[0134]
因此,在修理和/或取回期间,其他运载工具可以在不存在故障状况的一个或多个部分中执行它们的正常运行。因此,提高了效率,因为将允许一些运载工具在所有时间运行,一个例外是所有部分同时存在故障状况的情况。
[0135]
下面将给出一些进一步的示例。
[0136]
示例1
[0137]
在本示例中,故障状况是不能自行移动到服务站的故障运载工具。故障运载工具已经停在第一部分s1中。因此,该故障运载工具必须被从网格取回到服务站和/或必须在网格上修理,通常需要人借助服务运载工具移动到网格上。服务运载工具可提供足够的保护,防止与服务运载工具相邻的正在移动的运载工具。然而,在维修/取回期间,通常需要人伸出他/她的手臂来接触故障运载工具,或者离开服务运载工具并站在存储网格的顶部。因此,存在由相邻的正在移动的运载工具造成伤害的潜在风险。
[0138]
根据本发明,当除故障运载工具之外的所有容器搬运运载工具201、301离开其中存在故障状况的部分s1时,可以避免这种情况。当然,可以使用中央通信系统500来指示运行中的运载工具与故障运载工具保持预定距离,或者指示运行中的运载工具仅在第二部分s2和/或第三部分s3中操作。然而,对于在故障运载工具上执行维修操作的人来说,屏障402将表示额外的安全性,因为屏障将物理上阻止运载工具靠近故障运载工具操作。
[0139]
示例2
[0140]
在本示例中,故障状况是位置错误的存储容器,即,存储容器处于容器搬运运载工具无法连接到存储容器的位置。这里,存储容器将在位置错误的存储容器下方形成针对存储容器的障碍物和/或形成针对容器搬运运载工具的移动的障碍物。
[0141]
以与第一示例类似的方式,这里也需要人移动到网格上,例如借助于服务运载工具。
[0142]
示例3
[0143]
在该示例中,故障状况是位置错误的产品项,即,从存储容器中掉落并且现在处于容器搬运运载工具不能连接到存储容器的位置、存储容器不能相互堆叠的位置或对容器搬运运载工具的移动形成障碍的位置的产品项。
[0144]
同样,这里也将需要人移动到网格上,例如借助于服务运载工具。
[0145]
在上述示例中,例如,借助于检测未移动运载工具的相机、从故障运载工具发送的错误信号、检测处于可疑位置的存储容器或阻塞运载工具路径的掉落物品的相机等,可以自动检测故障状况的检测。故障状况的检测也可以由人手动给出,例如,基于对故障状况的观察,人按下按钮(例如靠近网格的紧急按钮、用户界面上的按钮等)。然后,人通常将会按下一个按钮,指示其中出现故障状况的部分。
[0146]
在图5、6和7中,示出三维的存储网格104包括沿其边界b(在图1中用虚线b表示)设置在存储网格104上方的栅栏420。借助于栅栏420,可以防止人进入存储网格104的第一部分,即,防止人与在存储网格104上操作的容器搬运运载工具之间的碰撞,或者防止人因落入存储网格的存储列而受伤。此外,栅栏420物理上阻止容器搬运运载工具移动到存储网格104的边界b之外。栅栏420与处于其第二状态的屏障402一起将存储网格104的区域s1、s2分隔成封闭的安全区域或保护区域。
[0147]
示例4
[0148]
现在参考图10a。这里,在第一部分s1和第二部分s2之间的边界b1-2上检测到故障运载工具形式的故障状况。因此,故障状况本身可能阻碍屏障402进入第二状态。
[0149]
在该示例中,当屏障处于第一状态时,屏障402可从图10a所示的初始位置移动到图10b所示的后续位置。然后,使屏障402进入第二状态。在后续位置,故障状况不再阻碍屏障移动到第二状态。应当注意,处于初始位置的第一部分s1和第二部分s2不同于处于新位置的第一部分s1和第二部分s2。
[0150]
根据以上所述,可以实现分离边界b1-2的移动。
[0151]
示例5
[0152]
现在参考图11a,其示出了与示例4类似的情况,其中故障状况是出现在第一部分s1和第二部分s2之间的边界b1-2上的故障运载工具。这里,屏障402是图8a和8b所示的类型,即,在第一状态下设置在运载工具行驶水平z0下方的枢转类型的屏障。
[0153]
这里,屏障402的致动器m足够强大,以在屏障402从其第一状态移动到其第二状态时将容器搬运运载工具201、301推入第一部分s1。如果致动器m足够强大来推动运载工具,则致动器将能够将存储容器推离边界b1-2。
[0154]
在前面的描述中,已经参考说明性实施例描述了根据本发明的自动存储和取回系统的各个方面。出于解释的目的,列出了具体的数字、系统和配置,以提供对系统及其工作原理的透彻理解。然而,该描述不旨在被解释为限制意义。对于公开的主题所属领域的技术人员来说显而易见的说明性实施例以及系统的其他实施例的各种修改和变化被认为落入本发明的范围内。
[0155]
参考编号列表
[0156]
现有技术(图1至4):
[0157]
1 现有技术自动存储和取回系统
[0158]
100 框架结构
[0159]
102 框架结构的直立构件
[0160]
103 框架结构的水平构件
[0161]
104 存储网格
[0162]
105 存储列
[0163]
106 存储容器
[0164]
106
’ꢀ
存储容器的具体位置
[0165]
107 堆叠
[0166]
108 轨道系统
[0167]
110 第一方向(x)平行轨道
[0168]
110a 第一方向(x)第一轨道
[0169]
110b 第一方向(x)第二轨道
[0170]
111 第二方向(x)平行轨道
[0171]
111a 第二方向(y)的第一轨道
[0172]
111b 第二方向(y)第二轨道
[0173]
112 存取口
[0174]
119 第一端口列
[0175]
120 第二端口列
[0176]
201 现有技术存储容器运载工具
[0177]
201a 存储容器运载工具201的车身
[0178]
201b 驱动装置/车轮布置,第一方向(x)
[0179]
201c 驱动装置/车轮布置,第二方向(y)
[0180]
301 现有技术悬臂式存储容器运载工具
[0181]
301a 存储容器运载工具301的车身
[0182]
301b 第一方向(x)驱动装置
[0183]
301c 第二方向(y)驱动装置
[0184]
304 夹持装置
[0185]
401 系统发射器
[0186]
402 屏障
[0187]
410 通道
[0188]
420 栅栏
[0189]
500 控制系统
[0190]
x 第一方向
[0191]
y 第二方向
[0192]
z 第三方向
[0193]
m 致动器
[0194]
b 边界。