1.本实用新型涉及功率单元转运技术领域,尤其涉及一种功率单元转运车和功率单元维护系统。
背景技术:
2.高压变频器的核心部件为功率单元,由于功率单元的故障率较高,因此,需要经常对功率单元进行更换和维护。
3.目前,由于功率单元的体积和重量较大,超出了人力作业的承受范围,因此,对功率单元进行拆装时,经常通过叉车对功率单元进行转运。由于功率单元在高压变频器上的安装位置较高,叉车在接收和转运功率单元时经常发生侧翻现象,不仅损坏设备,而且危害操作人员的身体健康,降低了功率单元拆卸转运的安全系数。
4.因此,如何提升功率单元拆卸转运的安全系数,是本领域技术人员目前需要解决的技术问题。
技术实现要素:
5.有鉴于此,本实用新型的目的在于提供一种功率单元转运车,以提升功率单元拆卸转运的安全系数。
6.为了实现上述目的,本实用新型提供了如下技术方案:
7.一种功率单元转运车,包括:
8.能够移动的机架;
9.设置于所述机架上的剪式升降机构;
10.设置于所述机架上的锁紧手杆,所述锁紧手杆能够沿其自身轴线作往复直线移动且能够绕其自身轴线转动,所述锁紧手杆靠近机柜的一侧设置有限位凸起,所述机柜上设有能够与所述锁紧手杆和所述限位凸起配合的葫芦孔,并且所述锁紧手杆的外侧壁上切割有两个互相平行的凹陷部;
11.锁紧拉杆,所述锁紧拉杆能够沿所述机架的高度方向作往复直线移动,所述锁紧拉杆上设置有能够与所述锁紧手杆配合的解锁孔和能够与所述凹陷部配合的限位槽,所述解锁孔和所述限位槽沿所述机架的高度方向依次且连通设置,所述锁紧手杆穿过所述葫芦孔并沿第一方向转动预设角度后,通过所述葫芦孔与所述限位凸起的配合能够限制所述锁紧手杆沿其自身轴线作往复移动,同时所述限位槽的两个侧壁所在平面分别平行于两个凹陷部所在平面;
12.设置于所述剪式升降机构的顶部的托盘,所述托盘能够接收并存放功率单元,并且所述托盘的外侧壁设置有撞块,所述撞块能够推动所述锁紧拉杆向下移动;以及
13.设置于所述锁紧拉杆的底部的弹性元件,所述弹性元件远离所述锁紧拉杆的一侧与所述机架接触。
14.优选地,在上述功率单元转运车中,所述预设角度为90
°
。
15.优选地,在上述功率单元转运车中,所述凹陷部为在所述锁紧手杆上切割出的矩形面接触部,并且两个所述凹陷部沿所述锁紧手杆的轴线对称设置,所述限位槽为能够与两个所述凹陷部配合的矩形槽。
16.优选地,在上述功率单元转运车中,所述剪式升降机构包括手柄、与所述手柄连接的丝杠螺母组件和与所述丝杠螺母组件的螺母连接的剪臂。
17.优选地,在上述功率单元转运车中,所述剪臂包括第一剪臂、第二剪臂、第三剪臂和第四剪臂,所述第一剪臂的第一端和所述第二剪臂的第一端均与所述机架转动连接,所述第三剪臂的第一端和所述第四剪臂的第一端均与所述托盘转动连接,所述丝杠螺母组件包括与所述手柄连接的丝杠本体、与所述丝杠本体转动连接的第一螺母和与所述丝杠本体转动连接的第二螺母,所述丝杠本体上设有与所述第一螺母配合的第一螺纹和与所述第二螺母配合的第二螺纹,所述第一螺纹和所述第二螺纹为反向螺纹,所述丝杠本体转动时,所述第一螺母和所述第二螺母沿所述丝杠本体的轴线作直线运动,并且,所述第一剪臂的第二端和所述第三剪臂的第二端与所述第一螺母转动连接,所述第二剪臂的第二端和所述第四剪臂的第二端与所述第二螺母转动连接。
18.优选地,在上述功率单元转运车中,还包括设置于所述机架的底部的行走轮。
19.优选地,在上述功率单元转运车中,所述机架上设置有用于对所述锁紧拉杆的移动进行导向的导向结构。
20.优选地,在上述功率单元转运车中,所述锁紧拉杆上设置有能够与所述撞块适配的下降驱动结构。
21.优选地,在上述功率单元转运车中,所述弹性元件为弹簧。
22.一种功率单元维护系统,包括如上任意一项所述的功率单元转运车。
23.使用本实用新型所提供的功率单元转运车时,由于托盘设置于剪式升降机构的顶部,因此,通过剪式升降机构能够带动托盘升降,随着托盘的下降,设置于托盘外侧壁的撞块推动锁紧拉杆向下移动,直至锁紧拉杆上的解锁孔和锁紧手杆配合,此时,锁紧手杆既能够沿其自身轴线作往复直线移动,又能够绕其自身轴线转动,即锁紧手杆处于解锁状态,锁着锁紧拉杆向下移动,锁紧拉杆底部的弹性元件处于压缩状态;由于机架能够移动,因此通过机架的移动能够将该功率单元转运车转运至机柜附近,待该功率单元转运车转运至机柜附近后,推动锁紧手杆,使锁紧手杆设置有限位凸起的一端进入机柜上的葫芦孔中,并沿第一方向将锁紧手杆转动预设角度,此时通过葫芦孔和限位凸起的配合能够限制锁紧手杆沿其自身轴线往复移动,同时限位槽的两个侧壁所在平面平行于两个凹陷部所在平面,再通过剪式升降机构将托盘升起至需求位置,随着托盘的升起,压缩状态的弹性元件推动锁紧拉杆向上移动,直至锁紧拉杆的限位槽与锁紧手杆的凹陷部配合,此时,锁紧手杆在葫芦孔和限位凸起的配合下无法沿其自身轴线作往复移动,在限位槽和凹陷部的配合下无法转动,即锁紧手杆处于锁紧状态,该功率单元转运车与机柜可靠地连接在一起;将功率单元由机柜内拉出至托盘上后,再通过剪式升降机构带动托盘下降,使托盘上的撞块推动锁紧拉杆向下移动,直至锁紧手杆上的凹陷部与锁紧拉杆上的限位槽脱离配合,锁紧手杆进入与限位槽连通的解锁孔中,然后沿第一方向的反方向转动预设角度,使限位凸起与葫芦孔对齐后,向远离机柜的一侧拉动锁紧手杆,使得限位凸起由机柜的葫芦孔内脱出,此时,锁紧手杆能够绕其自身轴线转动且能够沿其自身轴线移动,锁紧手杆实现解锁,即该功率单元
转运车与机柜的连接关系解除,最后通过机架的移动将该功率单元转运车移动至所需位置,至此完成功率单元的拆卸工作。由此可见,本实用新型所提供的功率单元转运车不仅能够与机柜连接为一个整体,并且在与机柜连接为一个整体后能够实现锁紧功能,减少了功率单元转运车的侧翻现象,不仅保护了设备,而且使得操作人员的身体健康得到了保障,提升了功率单元拆卸转运的安全系数。
附图说明
24.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
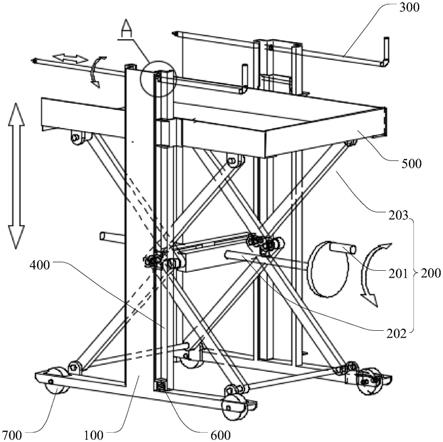
25.图1为本实用新型实施例所提供的一种功率单元转运车的立体结构示意图;
26.图2为本实用新型实施例所提供的一种功率单元转运车的侧面结构示意图;
27.图3为本实用新型实施例所提供的一种锁紧手杆处于解锁状态时的局部结构示意图;
28.图4为本实用新型实施例所提供的一种锁紧手杆处于锁紧状态时的局部结构示意图。
29.其中,100为机架,200为剪式升降机构,201为手柄,202为丝杠螺母组件,203为剪臂,2031为第一剪臂,2032为第二剪臂,2033为第三剪臂,2034为第四剪臂,300为锁紧手杆,301为限位凸起,302为凹陷部,400为锁紧拉杆,401为解锁孔,402为限位槽,500为托盘,501为撞块,600为弹性元件,700为行走轮,800为机柜,801为葫芦孔。
具体实施方式
30.有鉴于此,本实用新型的核心在于提供一种功率单元转运车,以提升功率单元拆卸转运的安全系数。
31.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
32.如图1至图4所示,本实用新型实施例公开了一种功率单元转运车,包括机架100、剪式升降机构200、锁紧手杆300、锁紧拉杆400、托盘500和弹性元件600。
33.其中,机架100能够移动;剪式升降机构200设置于机架100上;锁紧手杆300设置于机架100上,锁紧手杆300能够沿其自身轴线作往复直线移动且能够绕其自身轴线转动,锁紧手杆300靠近机柜800的一侧设置有限位凸起301,机柜800上设有能够与锁紧手杆300和限位凸起301配合的葫芦孔801,并且锁紧手杆300的外侧壁上切割有两个互相平行的凹陷部302;锁紧拉杆400能够沿机架100的高度方向作往复直线移动,锁紧拉杆400上设置有能够与锁紧手杆300配合的解锁孔401和能够与凹陷部302配合的限位槽402,解锁孔401和限位槽402沿机架100的高度方向依次且连通设置,锁紧手杆300穿过葫芦孔801并沿第一方向转动预设角度后,通过葫芦孔801和限位凸起301的配合能够限制锁紧手杆沿其自身轴线作
往复移动,同时,限位槽402的两个侧壁所在平面分别平行于两个凹陷部302所在平面;托盘500设置于剪式升降机构200的顶部,托盘500能够接收并存放功率单元,并且托盘500的外侧壁设置有撞块501,撞块501能够推动锁紧拉杆400向下移动;弹性元件600设置于锁紧拉杆400的底部,弹性元件600远离锁紧拉杆400的一侧与机架100接触。
34.使用本实用新型所提供的功率单元转运车时,由于托盘500设置于剪式升降机构200的顶部,因此,通过剪式升降机构200能够带动托盘500升降,随着托盘500的下降,设置于托盘500外侧壁的撞块501推动锁紧拉杆400向下移动,直至锁紧拉杆400上的解锁孔401和锁紧手杆300配合,此时,锁紧手杆300既能够沿其自身轴线作往复直线移动,又能够绕其自身轴线转动,即锁紧手杆300处于解锁状态,锁着锁紧拉杆400向下移动,锁紧拉杆400底部的弹性元件600处于压缩状态;由于机架100能够移动,因此通过机架100的移动能够将该功率单元转运车转运至机柜800附近,待该功率单元转运车转运至机柜800附近后,推动锁紧手杆300,使锁紧手杆300设置有限位凸起301的一端进入机柜800上的葫芦孔801中,并沿第一方向将锁紧手杆300转动预设角度,此时通过葫芦孔801和限位凸起301的配合能够限制锁紧手杆300沿其自身轴线往复移动,同时限位槽402的两个侧壁所在平面平行于两个凹陷部302所在平面,再通过剪式升降机构200将托盘500升起至需求位置,随着托盘500的升起,压缩状态的弹性元件600推动锁紧拉杆400向上移动,直至锁紧拉杆400的限位槽402与锁紧手杆300的凹陷部302配合,此时,锁紧手杆300在葫芦孔801和限位凸起301的配合下无法沿其自身轴线作往复移动,在限位槽402和凹陷部302的配合下无法转动,即锁紧手杆300处于锁紧状态,该功率单元转运车与机柜800可靠地连接在一起;将功率单元由机柜800内拉出至托盘500上后,再通过剪式升降机构200带动托盘500下降,使托盘500上的撞块501推动锁紧拉杆400向下移动,直至锁紧手杆300上的凹陷部302与锁紧拉杆400上的限位槽402脱离配合,锁紧手杆300进入与限位槽402连通的解锁孔401中,然后沿第一方向的反方向转动预设角度,使限位凸起301与葫芦孔801对齐后,向远离机柜800的一侧拉动锁紧手杆300,使得限位凸起301由机柜800的葫芦孔801内脱出,此时,锁紧手杆300能够绕其自身轴线转动且能够沿其自身轴线移动,锁紧手杆300实现解锁,即该功率单元转运车与机柜800的连接关系解除,最后通过机架100的移动将该功率单元转运车移动至所需位置,至此完成功率单元的拆卸工作。由此可见,本实用新型所提供的功率单元转运车不仅能够与机柜800连接为一个整体,并且在与机柜800连接为一个整体后能够实现锁紧功能,减少了功率单元转运车的侧翻现象,不仅保护了设备,而且使得操作人员的身体健康得到了保障,提升了功率单元拆卸转运的安全系数。
35.需要说明的是,通过该功率单元转运车安装功率单元时,只需反向重复以上操作步骤即可实现,本文在此不再一一赘述。
36.另外,上述锁紧手杆300沿第一方向转动的预设角度可以是80
°
、90
°
或者100
°
等角度,只要是转动预设角度后能够通过限位凸起301和葫芦孔801的配合限制锁紧手杆300沿其自身轴线移动的角度均属于本实用新型保护范围内;优选地,本实用新型实施例所提供的预设角度为90
°
。
37.进一步地,凹陷部302可以是在锁紧手杆300上切割出的矩形面接触部、梯形面接触部或者腰型面接触部等类型,只要是能够满足使用要求的类型均属于本实用新型保护范围内;优选地,本实用新型实施例所提供的凹陷部302为在锁紧手杆300上切割出的矩形面
接触部,并且两个凹陷部302沿锁紧手杆300的轴线对称设置,以便于加工制造。
38.同样地,限位槽402可以是矩形槽、u型槽或者是楔形槽等类型,只要是能够与两个凹陷部302配合的类型均属于本实用新型保护范围内;优选地,本实用新型实施例所提供的限位槽402为能够与两个凹陷部302配合的矩形槽,结构简单,便于加工制造。
39.另外,本实用新型实施例所提供的剪式升降机构200可以通过蓄电池驱动、液压驱动或者气压驱动等方式驱动,只要是能够使剪式升降机构200升降的驱动方式均属于本实用新型保护范围内;优选地,本实用新型实施例所提供的剪式升降机构200通过手柄201的转动驱动,不需要现场提供电源,并且减少了后期维护工作。
40.具体地,如图1和图2所示,剪式升降机构200包括手柄201、与手柄201连接的丝杠螺母组件202和与丝杠螺母组件202的螺母连接的剪臂203,以便于通过手柄201的转动带动丝杠螺母组件202的丝杠转动,通过丝杠螺母组件202的螺母带动剪臂203一端作往复直线移动,实现升降。
41.更具体地,剪臂203包括第一剪臂2031、第二剪臂2032、第三剪臂2033和第四剪臂2034,第一剪臂2031的第一端和第二剪臂2032的第一端均与机架100转动连接,第三剪臂2033的第一端和第四剪臂2034的第一端均与托盘500转动连接,丝杠螺母组件202包括与手柄201连接的丝杠本体、与丝杠本体转动连接的第一螺母和与丝杠本体转动连接的第二螺母,丝杠本体上设有与第一螺母配合的第一螺纹和与第二螺母配合的第二螺纹,第一螺纹和第二螺纹为反向螺纹,丝杠本体转动时,第一螺母和第二螺母沿丝杠本体的轴线作直线运动,并且,第一剪臂2031的第二端和第三剪臂2033的第二端与第一螺母转动连接,第二剪臂2032的第二端和第四剪臂2034的第二端与第二螺母转动连接,以便于通过手柄201带动丝杠本体的转动,通过丝杠本体的转动带动反向设置螺纹的第一螺母和第二螺母逐渐远离,或者逐渐靠近,使得第一剪臂2031的第二端与第二剪臂2032的第二端逐渐远离或者逐渐靠近,第三剪臂2033的第二端与第四剪臂2034的第二端逐渐远离或者逐渐靠近,随着第一剪臂2031与第二剪臂2032之间的夹角和第三剪臂2033与第四剪臂2034之间的夹角变化,剪式升降机构200带动托盘500作升降运动。
42.进一步地,该功率单元转运车可以通过在机架100底部设置行走轮、滑块滑槽组件或者滑轮滑轨组件等结构实现机架100的移动,只要是能够使机架100移动的结构均属于本实用新型保护范围内;优选地,本实用新型实施例所提供的功率单元转运车还包括设置于机架100的底部的行走轮700,以便于通过行走轮700的转动带动机架100移动。
43.上述行走轮700可以是定向轮、万向轮或者万向带刹车轮等类型,只要是能够满足使用要求的类型均属于本实用新型保护范围内。
44.另外,上述机架100上设置有导向结构,以便于对锁紧拉杆400沿机架100高度方向的往复直线移动进行导向,提高锁紧拉杆400沿机架100高度方向的运动轨迹精度。
45.需要说明的是,上述导向结构可以是导向槽、导轨或者导向杆等类型,只要是能够实现对锁紧拉杆400进行导向的结构均属于本实用新型保护范围内。
46.进一步地,锁紧拉杆400上设置有能够与撞块501适配的下降驱动结构,以便于剪式升降机构200带动托盘500下降时,通过撞块501与下降驱动结构的配合,实现撞块501带动锁紧拉杆400向下移动,直至锁紧手杆300进入锁紧拉杆400上的解锁孔401中。
47.同样地,上述下降驱动结构可以是与撞块501适配的孔或者槽等结构,只要是能够
满足使用要求的结构均属于本实用新型保护范围内。
48.另外,本实用新型涉及的弹性元件600可以是弹簧、橡胶块或者胶体气囊等类型,只要是压缩后能够产生压缩弹力,推动锁紧拉杆400向上移动的类型均属于本实用新型保护范围内;优选地,本实用新型实施例所提供的弹性元件600为弹簧,结构简单,便于安装。
49.此外,本实用新型还公开了一种功率单元维护系统,包括如上任意一项所述的功率单元转运车,因此兼顾了上述功率单元转运车的所有技术效果,本文在此不再一一赘述。
50.本实用新型的说明书和权利要求书及上述附图中的术语“第一”和“第二”等是用于区别不同的对象,而不是用于描述特定的顺序。此外术语“包括”和“具有”以及他们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有设定于已列出的步骤或单元,而是可包括没有列出的步骤或单元。
51.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。