1.本实用新型涉及回收容器技术领域,尤其是涉及一种拆卸料回收容器。
背景技术:
2.拆卸料回收容器是用于回收拆卸下的物料的容器,一般设置在拆卸流水线的末端,用于回收拆卸料,一般常见的回收容器,拆卸料从传送带上直接落入回收容器内,拆卸料容易堆积在一起,在处理时比较杂乱不方便整理,且部分拆卸料在拆卸后还需重复利用,拆卸料在下落时可能因碰撞导致拆卸料部分零件损坏,影响二次利用。
技术实现要素:
3.针对现有技术存在的不足,本实用新型的目的是提供一种拆卸料回收容器,以解决现有的拆卸料回收容器中,在进行回收时,容易杂乱堆积在一起,不方便整理的情况,还能防止在拆卸料落下时可能因碰撞导致零件损坏的情况。
4.本实用新型的上述实用新型目的是通过以下技术方案得以实现的:
5.一种拆卸料回收容器,包括底座、控制机构、容器与进料机构,所述底座的一侧设有控制机构,所述控制机构的下端固定连接在底座的侧壁上,所述底座的正上方设有容器,所述容器的底面卡合在底座的顶面上,所述底座的另一侧面设有进料机构,所述进料机构的下端固定连接在底座的侧壁上,所述控制机构的上端位于容器的顶部一侧,所述进料机构的上端位于容器的顶部另一侧。
6.本实用新型在一较佳示例中可以进一步配置为:所述底座包括底板、进线孔、伸缩机构和卡板,所述底板位于底座的底部,所述底板的一侧固定连接控制机构,所述底板与控制机构的连接处开设有进线孔,所述底板的另一侧固定连接进料机构的下端,所述底板的顶面中部固定设有伸缩机构,所述伸缩机构的底部位于底板内,所述伸缩机构与控制机构电性连接,所述伸缩机构位于容器的正下方,所述底板的顶面固定设有卡板,所述卡板位于伸缩机构的外侧,所述卡板卡合在容器的底部。
7.本实用新型在一较佳示例中可以进一步配置为:所述伸缩机构包括气缸、伸缩杆和推板,所述气缸固定在底板内,所述气缸上设有伸缩杆,所述伸缩杆的下端固定连接气缸,所述伸缩杆的上端固定设有推板,所述推板位于容器的正下方,所述气缸与控制机构之间电性连接,所述气缸控制伸缩杆做伸缩运动。
8.本实用新型在一较佳示例中可以进一步配置为:所述控制机构包括控制器、固定管、连接管、传输线和感应器,所述控制器位于底板的一侧,所述控制器的侧壁上设有固定管,所述固定管的一端固定在控制器上,所述固定管的另一端固定在底板的侧壁上,所述控制器的顶面固定设有连接管,所述连接管的顶端设有感应器,所述感应器位于控制器的正上方,所述感应器位于容器的顶部一侧,所述控制器上设有传输线,所述传输线的一端固定连接感应器,所述传输线的另一端固定连接气缸,所述传输线贯穿控制器,所述传输线位于固定管与连接管内部,所述气缸、控制器与感应器之间通过传输线电性连接。
9.本实用新型在一较佳示例中可以进一步配置为:所述容器包括固定板、卡槽、固定杆、连接板和移动板,所述容器的底部设有固定板,所述固定板位于推板的正上方,所述固定板的底面开设有卡槽,所述卡槽卡合在卡板上,所述固定板的顶面四角固定设有固定杆,所述固定杆为l型,所述固定杆之间固定设有连接板,所述固定杆的内侧设有移动板,所述移动板的四角卡合在固定杆内,所述移动板位于固定板的正上方,所述移动板在固定杆内上下移动。
10.本实用新型在一较佳示例中可以进一步配置为:所述进料机构包括连接杆、进料板和挡板,所述连接杆的下端固定连接在底板的侧壁上,所述连接杆的上端固定设有进料板,所述进料板的一端底面固定在连接杆顶部,所述进料板的另一端位于容器的顶端一侧,所述进料板的两侧固定设有挡板。
11.综上所述,本实用新型包括以下至少一种有益技术效果:
12.1.本实用新型在使用的过程中,通过设置有容器与伸缩机构,伸缩机构的气缸带动伸缩杆上下伸缩移动,从而带动推板上下移动,从而使得容器内的移动板在固定杆内侧上下进行移动,从而使得拆卸料进入容器内时,落在移动板上,通过伸缩机构缓慢下降到容器底部,防止传统回收容器中,拆卸料直接下落到容器底部导致拆卸料上零件碰撞损坏的情况,从而方便二次利用。
13.2.本实用新型在使用的过程中,通过设置有控制机构与伸缩机构,在使用时伸缩机构将移动板推动至容器上端,控制机构上的感应器位于容器上端一侧,当拆卸料落到移动板上时,阻挡在感应器前,感应器感应到拆卸料从而将信息传递给控制器,从而通过传输线控制气缸启动,从而控制伸缩杆回缩,从而控制移动板下降,直到移动板上的拆卸料不再阻挡感应器,下一个拆卸料进入时重复启动,可自动将进入容器内的拆卸料进行整理,防止拆卸料杂乱堆积,不方便处理的情况。
14.3.本实用新型在使用的过程中,通过设置有底座和容器,在使用时容器底部的卡槽卡合在底座上的卡板上,从而将容器进行固定,容器放满时可方便进行更换。
附图说明
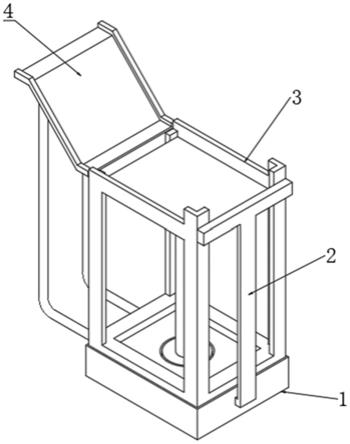
15.图1为本实用新型的整体结构示意图;
16.图2为本实用新型的剖面示意图;
17.图3为本实用新型的底座结构示意图;
18.图4为本实用新型的控制机构剖面示意图;
19.图5为本实用新型的容器剖面示意图;
20.图6为本实用新型的进料机构结构示意图。
21.附图标记:1、底座;11、底板;12、进线孔;13、伸缩机构;131、气缸;132、伸缩杆;133、推板;14、卡板;2、控制机构;21、控制器;22、固定管;23、连接管;24、传输线;25、感应器;3、容器;31、固定板;32、卡槽;33、固定杆;34、连接板;35、移动板;4、进料机构;41、连接杆;42、进料板;43、挡板。
具体实施方式
22.以下结合附图对本实用新型作进一步详细说明。
23.参照图1-6,本实用新型提供以下技术方案:一种拆卸料回收容器,包括底座1、控制机构2、容器3与进料机构4,底座1的一侧设有控制机构2,控制机构2的下端固定连接在底座1的侧壁上,底座1的正上方设有容器3,容器3的底面卡合在底座1的顶面上,底座1的另一侧面设有进料机构4,进料机构4的下端固定连接在底座1的侧壁上,控制机构2的上端位于容器3的顶部一侧,进料机构4的上端位于容器3的顶部另一侧。
24.参照图3与图4所示,具体的,底座1包括底板11、进线孔12、伸缩机构13和卡板14,底板11位于底座1的底部,底板11的一侧固定连接控制机构2,底板11与控制机构2的连接处开设有进线孔12,底板11的另一侧固定连接进料机构4的下端,底板11的顶面中部固定设有伸缩机构13,伸缩机构13的底部位于底板11内,伸缩机构13与控制机构2电性连接,伸缩机构13位于容器3的正下方,底板11的顶面固定设有卡板14,卡板14位于伸缩机构13的外侧,卡板14卡合在容器3的底部;伸缩机构13包括气缸131、伸缩杆132和推板133,气缸131固定在底板11内,气缸131上设有伸缩杆132,伸缩杆132的下端固定连接气缸131,伸缩杆132的上端固定设有推板133,推板133位于容器3的正下方,气缸131与控制机构2之间电性连接,气缸131控制伸缩杆132做伸缩运动,通过伸缩机构13使得拆卸料缓慢落入容器3内部,防止直接下落到容器3底部导致拆卸料上零件碰撞损坏的情况,从而方便二次利用;控制机构2包括控制器21、固定管22、连接管23、传输线24和感应器25,控制器21位于底板11的一侧,控制器21的侧壁上设有固定管22,固定管22的一端固定在控制器21上,固定管22的另一端固定在底板11的侧壁上,控制器21的顶面固定设有连接管23,连接管23的顶端设有感应器25,感应器25位于控制器21的正上方,感应器25位于容器3的顶部一侧,控制器21上设有传输线24,传输线24的一端固定连接感应器25,传输线24的另一端固定连接气缸131,传输线24贯穿控制器21,传输线24位于固定管22与连接管23内部,气缸131、控制器21与感应器25之间通过传输线24电性连接,可通过控制器21与感应器25可自动将进入容器3内的拆卸料进行整理,防止拆卸料杂乱堆积,不方便处理的情况。
25.参照图5与图6所示,具体的,容器3包括固定板31、卡槽32、固定杆33、连接板34和移动板35,容器3的底部设有固定板31,固定板31位于推板133的正上方,固定板31的底面开设有卡槽32,卡槽32卡合在卡板14上,固定板31的顶面四角固定设有固定杆33,固定杆33为l型,固定杆33之间固定设有连接板34,固定杆33的内侧设有移动板35,移动板35的四角卡合在固定杆33内,移动板35位于固定板31的正上方,移动板35在固定杆33内上下移动,在使用时容器3底部的卡槽32卡合在底座1上的卡板14上,从而将容器3进行固定,容器3放满时可方便进行更换;进料机构4包括连接杆41、进料板42和挡板43,连接杆41的下端固定连接在底板11的侧壁上,连接杆41的上端固定设有进料板42,进料板42的一端底面固定在连接杆41顶部,进料板42的另一端位于容器3的顶端一侧,进料板42的两侧固定设有挡板43,通过进料板42与挡板43可将拆卸料顺利送入容器3内。
26.本实用新型的使用流程及工作原理:本实用新型在使用时,首先,可将容器3底部的卡槽32卡合在底座1顶面的卡板14上,从而将容器3固定防止,当容器3放满时可方便拆下,进行更换;当容器3固定在底座1上时,底座1上的伸缩机构13上的气缸131启动,带动伸缩杆132推动,从而推动容器3内的移动板35,将移动板35推至容器3上端,随后当拆卸料通过进料板42进入容器3内时,拆卸料落在移动板35上,从而阻挡在感应器25的前方,随后感应器25感应到拆卸料后,将信息通过传输线24传递给控制器21,随后控制器21通过传输线
24控制气缸131,从而控制伸缩杆132回缩,从而带动移动板35下落,当移动板35与拆卸料下落,离开感应器25的前方,随后感应器25再度传递信息给控制器21,从而控制气缸131停止,当拆卸料再度进入容器3时,落入到之前拆卸料的上方,再度阻挡住感应器25,设备重复上诉步骤,从而实现自动整理拆卸料,且防止拆卸料因降落落差大导致零件碰撞损坏的情况。
27.本具体实施方式的实施例均为本实用新型的较佳实施例,并非依此限制本实用新型的保护范围,故:凡依本实用新型的结构、形状、原理所做的等效变化,均应涵盖于本实用新型的保护范围之内。