1.本实用新型属于自动化设备领域,具体涉及一种夹取装置及夹取系统。
背景技术:
2.现有技术中,取布夹具采用的是针式取布,这种取布结构复杂,成本较高,取布时会在布品上留下针孔,还经常会出现挑伤布品的情况。
3.同时,在进行大布料且厚度不一的布料取放,且确保布料取放成功。往往会通过设置多个机械臂手进行灵活调节,才能确保采取成功。但是,这种取料系统会出现占地面积大的情况。因此,设计出一种灵活取放布料的设备很有必要。
技术实现要素:
4.为解决上述技术问题,本实用新型提供一种夹取装置。
5.具体技术方案如下:
6.一种夹取装置,其不同之处在于,包括:
7.固定块;
8.夹爪,所述夹爪包括两个可相对运动的分爪;
9.及
10.连接在所述固定块与所述夹爪之间的一个或多个连接缓冲组件,所述连接缓冲组件包括连接杆及套于连接杆外侧的弹簧;所述夹爪可相对于所述连接缓冲组件进行运动。
11.进一步所述夹取装置还包括驱动装置,驱动装置带动两个所述分爪进行相对运动且连接在所述夹爪与所述缓冲组件之间;所述连接杆的一端与所述固定块连接,另一端与所述驱动装置滑动连接,所述弹簧设置在所述固定块与所述驱动装置之间。
12.进一步,所述驱动装置为平行气缸,所述气缸的输出端分别与所述分爪连接。
13.进一步,所述夹取装置包括多个所述缓冲连接件。
14.一种夹取系统,其不同之处在于,包括:
15.固定架;
16.及
17.设于所述固定架上的一个或多个上述所述份夹取装置。
18.进一步,所述固定架包括固定架框体、吊架体及支撑架体;所述吊架体与所述固定框架体呈角度连接,所述支撑架体设置在所述固定架框体的内部。
19.进一步,所述夹取装置与所述固定架框体通过固定连接块连接。
20.进一步,所述夹取系统还包括感应器,所述感应器与所述支撑架体连接。
21.进一步,在所述固定架框体靠近所述夹取装置的位置安装第一感应器。
22.进一步,在所述固定架框体远离所述夹取装置的位置安装第二感应器。
23.与现有技术相比,本实用新型的有益效果在于:
24.(1)采用夹爪夹取布匹,可以减少夹取共聚对于布匹的损伤,同时,缓冲组件的设
计,不仅能在进行提取动作时,利用弹簧的回复力有助于将布匹完全提取,整个设备动作灵活,可靠性高,成本低,简单实用,易调整控制。
25.(2)缓冲组件连接于驱动装置与固定块之间,可以对驱动装置形成缓冲保护,延长驱动装置的使用的寿命。
26.(3)使用多个缓冲设备时,在遇到厚度不一的布料时,可以利用弹簧力进行平衡高度。
27.(4)在固定架上安装多个夹取装置,由于夹取装置本身具有缓冲作用,因此在进行不同位置的夹取时,利用本身的缓冲作用即可进行顺利的夹取,不再依靠多个大型位移设备,节约场地。
附图说明
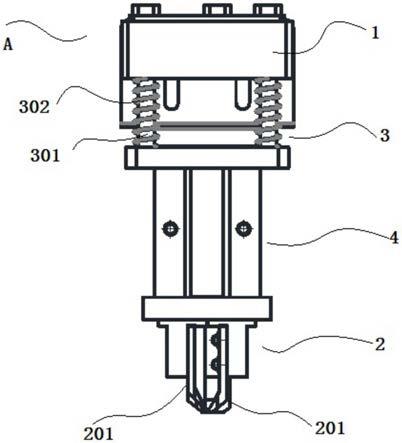
28.图1为夹取装置正视图;
29.图2为夹取系统的结构图;
30.图3为夹取装置与固定架的连接图。附图中,各标号所代表的部件列表如下:
31.夹取装置-a,固定块-1,夹爪-2,连接缓冲组件-3,驱动装置-4,分爪-201,连接杆-301,弹簧-302,固定架-b,固定架框体-5,吊架体-6,支撑架体-7,装载台-701,第一感应器-8,固定连接块-9,第二感应器-10。
具体实施方式
32.为了便于理解本技术,下面将参照相关附图对本技术进行更全面的描述。附图中给出了本技术的实施例。但是,本技术可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使本技术的公开内容更加透彻全面。
33.需要说明的是,当一个元件被认为是“连接”另一个元件时,它可以是直接连接到另一个元件,或者通过居中元件连接另一个元件。
34.实施例1
35.本实施例提供一种夹取装置,具体如图1所示,包括:
36.固定块1、夹爪2、连接缓冲组件3及驱动装置4。
37.夹爪2包括两个可相对运动的分爪201,分爪201均与驱动装置4连接。本实施例中,驱动装置4为平行气缸,夹爪在安装前采用锉刀调节其锋利程度,使其既可以与布匹产生足够大的摩擦力,又能确保不损坏布匹。平行气缸的输出端与两个分爪201连接。平行气缸与固定块1之间连接有两个连接缓冲组件3,两个缓冲组件3分别设置在平行气缸的一端的两侧,靠近两个分爪张开时的最大位移的位置。每个缓冲组件3包括连接杆301及套于连接杆301上的弹簧302,连接杆是类似于螺栓的结构,杆部的一端穿过固定块 1直至部分穿过固定平行气缸的上侧,另一端留在固定块1的上侧对其进行限位,平行气缸可相对于连接杆进行相对滑动,同时,带动夹爪2相对于连接杆进行相对运动,弹簧302设置在气缸以及固定块之间,由于弹簧302的连接,后续可利用其弹力对其进行复位。
38.夹取装置的使用方法:将其安装在类似于机械手臂的上下设备上,驱动平行气缸控制两个分爪的闭合,夹爪夹取布料后,将其上升,完成取料。
39.实施例2
40.本实施例提供一种夹取系统,具体如图2~3所示,
41.包括:固定架b及设于固定架b上的多个实施例1的夹取装置a。
42.固定架b包括固定架框体5、吊架体6及支撑架体7,在本实施例中,固定架b包括四个吊架体6,每个吊架体6的一端连接在固定架框体5的一角,另一端后续与升降位移设备连接,整个吊架体与固定架框体5呈现一定的夹角。夹取装置a分别设置在固定架框体的四角及部分边沿,在靠近安装于四角的夹取装置的位置,设有第一感应器8用于感知夹爪夹取物料是否成功,其信号输出端与报警灯(图中未示出)连接,其报警灯可外部设置,也可安装在固定架上。在未安装夹取装置a的固定架框体5的边沿安装有第二感应器10,其信号输出端与平行气缸连接,用于感知物料位置,升降位移设备下降至布匹的位置时闭合夹爪进行夹取,两部分的感应器分开设置,分开运作,互不干扰,确保感应灵敏度。支撑架体7设置在固定架框体的内部。在本实施例中,支撑架体7的中部设置有装载台701,在装载台701用于后续对升降位移设备的承重作用,在本实施例中,采用的是光电感应器。
43.在本实施中,夹取装置与所固定架框体通过固定连接块连接9,固定连接块包括垂直相接的两个侧体,其中一个侧体与固定块1连接,另一个侧体与固定架框体连接。
44.本实施例夹取系统的使用方法:将四个吊架体的另一端均与类似于机械手的升降位移设备连接。升降位移设备设置在布品的上方,第二感应器用于夹爪感知布料位置,待升降位移设备带动夹爪下降到布料的位置时,此时弹簧轻微压缩,升降位移设备停止下降的同时,闭合夹爪,夹取布匹。升降位移设备进行上升,完成取料,到指定的位置打开夹爪,完成放料。若第一感应器感应到夹爪夹取布料不成功或升降位移设备在移动物料过程中布料掉落,报警灯亮灯报警。
45.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。