一种铜箔自动装箱生产线
【技术领域】
1.本实用新型涉及一种铜箔自动装箱生产线。
背景技术:
2.铜箔,是覆铜板ccl及印制线路板pcb制造的重要的材料。在当今电子信息产业高速发展中,电解铜箔被称为电子产品信号与电力传输、沟通的“神经网络”,铜箔是一种阴质性电解材料,沉淀于线路板基底层上的一层薄的、连续的金属箔,在传统的生产制造过程中,铜箔在经过加工之后,由于铜箔堆叠容易损伤,需要将铜箔和纸张相间堆叠后装箱,由于铜箔和纸张质软容易变形,因此传统的工艺中,需要工人将铜箔和纸张逐一拿到包装箱中,这样耗时耗力、生产效率低、生产成本高,难以适应自动化生产的需求。
3.本实用新型正是基于上述的不足而产生的。
技术实现要素:
4.本实用新型目的是克服了现有技术的不足,提供一种减少人力,生产效率高、生产成本低的铜箔自动装箱生产线。
5.实用新型是通过以下技术方案实现的:
6.一种铜箔自动装箱生产线,其特征在于,包括有:用于存放铜箔的第一集料装置,包括有机座,所述的机座上设置有一个用于堆叠铜箔的承料架以及能够推动承料架相对机座上下移动的升降机构,所述的承料架起始位于低处,所述的机座上设置有能够检测铜箔减少到预设高度的低位传感器,所述的第一集料装置还设置有与低位传感器和升降机构连接的控制单元;第一机械手,其上设置有用于吸附铜箔的铜箔吸附装置,所述的铜箔吸附装置包括有用于吸附铜箔中央部位的中央吸附盘,所述的中央吸附盘的侧面至少设置有两个用于吸附铜箔边际部位的条状吸附盘;用于存放纸张的第二集料装置;第二机械手,其上设置有用于吸附纸张的纸张吸附装置,所述的纸张吸附装置包括有呈x型张开的支架,所述的支架的四个末端均设置有一个小吸盘;控制器,与第一机械手和第二机械手电连接进而控制二者将铜箔和纸张相间地拿取并放于包装箱中。
7.如上所述的生产线,所述的中央吸附盘与条状吸附盘之间活动连接,所述的中央吸附盘与条状吸附盘之间设置有用于推动条状吸附盘相对中央吸附盘横向移动的调节机构。
8.如上所述的生产线,所述的机座上还设置有能够检测到铜箔堆叠到预设高度的高位传感器,所述的承料架上设置有分别抵靠铜箔相邻的两侧边的两个限位板,所述的机座上设置有两个与所述的限位板围成四边形的推板,所述的机座与推板之间设置有能够分别推动推板朝向相对侧的限位板移动的推动机构,所述的推动机构、高位传感器均与所述的控制单元电连接。
9.如上所述的生产线,所述的中央吸附盘两侧设置有横向设置的滑杆26,所述的条状吸附盘滑动连接在滑杆26使得条状吸附盘能够相对中央吸附盘横向移动,所述的调节机
构为设置在条状吸附盘与中央吸附盘之间并能够推动条状吸附盘横向移动的伸缩电机。
10.如上所述的生产线,所述的中央吸附盘上设置有诺干个用于检测铜箔的距离的距离传感器。
11.如上所述的集料装置,所述的机座竖向设置有一个安装支架,所述的高位传感器和低位传感器均活动设置在安装支架上。
12.如上所述的集料装置,所述的安装支架上沿竖向设置有一条顶部开口进而供所述的高位传感器放入的安装槽,所述的高位传感器上设置有当高位传感器放入的安装槽后能够将其固定的固定机构。
13.如上所述的集料装置,所述的固定机构是连接在高位传感器上的夹子,所述的夹子具有能够夹住安装支架的夹紧部。
14.与现有技术相比,实用新型有如下优点:
15.1、本实用新型的铜箔自动装箱生产线包括有用于存放铜箔的第一集料装置、第一机械手、用于存放纸张的第二集料装置、第二机械手控制器以及控制器,第一机械手上设置有用于吸附铜箔的铜箔吸附装置,第二机械手上设置有用于吸附纸张的纸张吸附装置,控制器与第一机械手和第二机械手电连接进而控制二者拿取铜箔和纸张,然后将铜箔和纸张相间地放于包装箱中,进而将铜箔放入包装箱并用纸张相隔,整个过程可以自动化,减少人力,生产效率高、生产成本低。
16.2、本实用新型的中央吸附盘与条状吸附盘之间活动连接,所述的中央吸附盘与条状吸附盘之间设置有用于推动条状吸附盘相对中央吸附盘横向移动的调节机构,这样能够调节条状吸附盘横向的位置,从而匹配不同大小尺寸的铜箔。
17.3、本实用新型当第一集料装置用于存放物料时,铜箔逐一放置在承料架上,直到铜箔堆叠的厚道到达高位传感器识别的位置,这个位置可以根据搬运工或者搬运装置的高度设置,高位传感器将识别的信号传送到控制单元,控制单元控制升降机构下降,以保持铜箔堆叠的顶部的位置,将新的铜箔放置在堆叠好的铜箔上,这样不会因为铜箔位置过高而不便操作,当承料架下降到设定的位置,控制单元控制推动机构将推板17推动进而将铜箔推平整对齐,便于取放。
【附图说明】
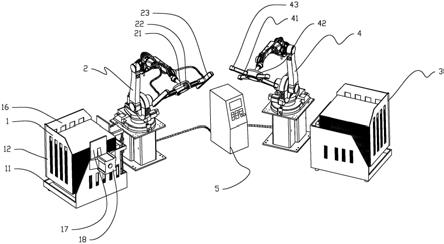
18.图1是本实用新型的铜箔自动装箱生产线的立体图;
19.图2是本实用新型的第一集料装置的立体图;
20.图3是本实用新型的第一集料装置的分解图;
21.图4是本实用新型的第一机械手的立体图;
22.图5是本实用新型的第一机械手的分解图;
23.图6是本实用新型的第一集料装置的电路示意图。
【具体实施方式】
24.下面结合附图对实用新型作进一步描述:
25.实用新型说明书所述的方位,如“上”、“下”、“左”、“右”、“前”、“后”等均为以附图的方位为基准,并以便于描述各个零部件之间关系为目的,并非指示各个零部件之间唯一
或者绝对的位置关系,仅为实现实用新型的其中一种实施方式,并不是对其实施方式的一种限制。
26.如图1所示,一种铜箔自动装箱生产线,包括有以下装置:用于存放铜箔的第一集料装置1,包括有机座11,所述的机座11上设置有一个用于堆叠铜箔的承料架12以及能够推动承料架12相对机座 11上下移动的升降机构13,所述的承料架12起始位于低处,所述的机座11上设置有能够检测铜箔减少到预设高度的低位传感器14,所述的第一集料装置1还设置有与低位传感器14和升降机构13连接的控制单元10,这样铜箔被拿取至低位传感器14能够识别的位置,控制单元10控制升降机构13将承料架12升起,使得铜箔的顶部一直处于较高的位置,以便于拿取;
27.第一机械手2,其上设置有用于吸附铜箔的铜箔吸附装置21,所述的铜箔吸附装置21包括有用于吸附铜箔中央部位的中央吸附盘 22,所述的中央吸附盘22的侧面至少设置有两个用于吸附铜箔边际部位的条状吸附盘23,这样使得铜箔被抓取同时形状固定不会变形,使得机械臂能够将铜箔抓取然后移动至包装箱,或者将铜箔运输至各个工位;
28.用于存放纸张的第二集料装置3;
29.第二机械手4,其上设置有用于吸附纸张的纸张吸附装置41,所述的纸张吸附装置41包括有呈x型张开的支架42,所述的支架42 的四个末端均设置有一个小吸盘43,小吸盘43将纸张吸附并使纸张呈张开状态;
30.控制器5,与第一机械手2和第二机械手4电连接进而控制二者拿取铜箔和纸张,然后将铜箔和纸张相间地放于包装箱中,进而将铜箔放入包装箱并用纸张相隔,整个过程可以自动化,减少人力,生产效率高、生产成本低。
31.如图4所示,作为一种更优的实施方式,所述的中央吸附盘22 与条状吸附盘23之间活动连接,所述的中央吸附盘22与条状吸附盘 23之间设置有用于推动条状吸附盘23相对中央吸附盘22横向移动的调节机构24,这样能够调节条状吸附盘23横向的位置,从而匹配不同大小尺寸的铜箔。
32.详细地说,如图4和5所示,所述的中央吸附盘22两侧设置有横向设置的滑杆26,所述的条状吸附盘23滑动连接在滑杆26使得条状吸附盘23能够相对中央吸附盘22横向移动,所述的调节机构 24为设置在条状吸附盘23与中央吸附盘22之间并能够推动条状吸附盘23横向移动的伸缩电机,伸缩电机通过紧固件连接在中央吸附盘22上,当然也可用伸缩气缸或者液压缸代替伸缩电机。
33.如图4和5所示,所述的中央吸附盘22上设置有诺干个用于检测铜箔的距离的距离传感器25,这样能够识别到中央吸附盘41周围的铜箔是否松脱或者铜箔弯曲起皱。
34.优选地,所述的中央吸附盘22中部设置有能够将铜箔推出的推块,以便将抓取的铜箔推开,以便于卸料。
35.作为一种更优的实施方式,如图2所示,所述的机座11上还设置有能够检测到铜箔堆叠到预设高度的高位传感器15,所述的承料架12上设置有分别抵靠铜箔相邻的两侧边的两个限位板16,所述的机座11上设置有两个与所述的限位板16围成四边形的推板17,所述的机座11与推板17之间设置有能够分别推动推板17朝向相对侧的限位板16移动的推动机构18,所述的推动机构18、高位传感器15均与所述的控制单元10电连接,控制单元10采用微型电脑、可编程控制器等,这样当第一集料装置1用于存放物料时,铜箔逐一放置在承料架
12上,直到铜箔堆叠的厚道到达高位传感器15识别的位置,这个位置可以根据搬运工或者搬运装置的高度设置,高位传感器 15将识别的信号传送到控制单元10,控制单元10控制升降机构13 下降,以保持铜箔堆叠的顶部的位置,将新的铜箔放置在堆叠好的铜箔上,这样不会因为铜箔位置过高而不便操作,当承料架12下降到设定的位置,控制单元10控制推动机构18将推板17推动进而将铜箔推平整对齐,便于取放。
36.如图2和3所示,作为一种更优的实施方式,所述的机座11竖向设置有一个安装支架19,所述的高位传感器15和低位传感器14 均活动设置在安装支架19上,以便根据需要调整高位传感器15和低位传感器14的位置,使得铜箔的顶部始终保持在高位传感器15和低位传感器14之间,以便于拿取和放置铜箔。
37.详细地说,如图3所示,所述的安装支架19上沿竖向设置有一条顶部开口进而供所述的高位传感器15放入的安装槽191,所述的高位传感器15上设置有当高位传感器15放入的安装槽191后能够将其固定的固定机构151,固定机构131可采用一般的紧固件连接,或者采用磁吸连接等,这样连接和拆卸都非常便捷。
38.如图3所示,所述的固定机构151是连接在高位传感器15上的夹子152,所述的夹子152具有能够夹住安装支架19的夹紧部153,结构简单巧妙,便于应用于实际生产,降低生产成本。
39.优选地,所述的升降机构13采用剪叉升降机构和电机,这样升降平稳,结构牢固耐用。
40.优选地,所述的推动机构18采用液压马达,这样使得推板15收到的推力线性好、动作平稳。
41.优选地,高位传感器15和低位传感器14均可采用距离传感器等。
42.以上所述的仅是本实用新型的实施例,方案中公知的具体结构及特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本实用新型结构的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。