1.本技术涉及智能插电技术领域,具体而言,涉及一种插电系统、插电控制方法、电子设备及存储介质。
背景技术:
2.现有的铁水运输载体充电技术中,充电单元包含的平行四边形回转机构在与滑触线接触时可能会变形,从而导致与导电滑触线接触不良,并且面充电单元包含的平行四边形回转机构所带电刷与导电滑触线存在大力摩擦和撞击过程,缩短电刷的使用寿命。
技术实现要素:
3.本技术实施例的目的在于提供一种插电系统、插电控制方法、电子设备及存储介质,通过伸缩组件调节充电单元和受电单元的距离,实现两者正面有效地接触,解决现有方法可能导致接触不良的问题。
4.本技术实施例提供了一种插电系统,所述系统包括:
5.充电机构,设置于地面安装架上,包括伸缩组件,所述伸缩组件的自由端设置有充电单元,用于调节所述充电单元与受电机构的距离;
6.受电机构,设置于待充电运输载体上,包括受电单元,用于与所述充电单元对接,以对所述待充电运输载体进行充电;
7.控制器,设置于所述充电机构上,用于控制所述伸缩组件动作,以使所述充电单元与所述受电单元贴合进行充电。
8.在上述实现过程中,通过伸缩组件的水平伸缩,使得充电单元和受电单元正面有效接触,避免接触不良的问题,此外,伸缩组件可根据测距单元测得的到受电单元的实测距离伸缩不同的行程,使得充电单元和受电单元能够紧密贴合。
9.进一步地,所述伸缩组件包括:
10.推杆和电机,所述电机用于带动所述推杆动作,以实现所述推杆的伸缩。
11.在上述实现过程中,通过电机带动推杆伸缩动作,实现受电单元和充电单元的贴合和原理,实现插电和断电。
12.进一步地,所述伸缩组件还包括:
13.缓冲器,一端设置于所述推杆的自由端,另一端与所述充电单元连接,用于对所述充电单元提供弹性支撑。
14.在上述实现过程中,推杆伸出通过缓冲器的缓冲加压使受电单元和充电单元紧密贴合,同时通过缓冲器的弹性作用,可避免摩擦和碰撞过程,增加碳刷的使用寿命。
15.进一步地,所述伸缩组件还包括:
16.伸缩超行程检测单元,用于检测所述推杆伸出的距离,并发送至所述控制器,以使所述控制器控制所述电机启停。
17.伸缩原点检测单元,用于检测所述推杆的收缩位置,并发送至所述控制器,以使所
述推杆收缩至原点。
18.在上述实现过程中,对推杆的伸出距离和收缩行程进行检测,避免推杆伸出过长或收缩时没有回归原位。
19.进一步地,所述受电单元呈喇叭状,在对所述充电单元进行对接充电时,处于半包裹状态。
20.在上述实现过程中,在充电状态时,受电单元对充电单元进行半包裹进行充电,可提高充电时的安全性。
21.进一步地,所述系统还包括:
22.测距单元,设置于所述伸缩组件的自由端,且在竖直方向上与所述充电单元齐平,用于检测到所述受电单元的距离,以使所述控制器控制所述电机动作。
23.在上述实现过程中,通过测距单元的测距,可准确获得伸缩组件的伸缩距离,使得受电单元和充电单元能够正面有效地紧密贴合。
24.本技术实施例还提供一种插电控制方法,应用于控制器,所述方法包括:
25.接收测距单元发送的充电单元到受电单元之间的距离;
26.根据所述距离控制电机进行相应行程的动作,以使所述充电单元与所述受电单元贴合进行充电。
27.在上述实现过程中,通过距离控制电机进行相应行程的动作,可实现两者正面有效地接触,解决现有方法可能导致接触不良的问题。
28.进一步地,所述方法还包括:
29.接收充电状态检测单元发送的充电完成指令;
30.根据所述充电完成指令控制所述电机动作,以使所述充电单元与所述受电单元断开。
31.在上述实现过程中,对充电过程进行监测,可在充电完成后,及时控制充电单元与所述受电单元断开。
32.本技术实施例还提供一种电子设备,所述电子设备包括存储器以及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行上述中任一项所述的插电控制方法。
33.本技术实施例还提供一种可读存储介质,所述可读存储介质中存储有计算机程序指令,所述计算机程序指令被一处理器读取并运行时,执行上述中任一项所述的插电控制方法。
附图说明
34.为了更清楚地说明本技术实施例的技术方案,下面将对本技术实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
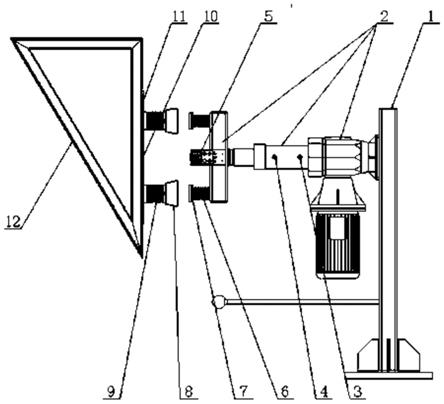
35.图1为本技术实施例提供的一种插电系统的结构示意图;
36.图2为本技术实施例提供的插电系统的俯视结构示意图;
37.图3为本技术实施例提供的插电系统的控制结构框图;
38.图4为本技术实施例提供的一种插电控制方法的流程图;
39.图5为本技术实施例提供的另一种插电控制方法的流程图;
40.图6为本技术实施例提供的电系统的运行流程图。
41.图标:
42.1-地面安装架;2-伸缩组件;3-伸缩原点检测单元;4-伸缩超行程检测单元;5-测距单元;6-缓冲器;7-充电单元;8-受电单元;9-绝缘隔离组件;10-测距反馈单元;11-受电装置安装板;12-车载安装支架。
具体实施方式
43.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行描述。
44.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。同时,在本技术的描述中,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
45.实施例1
46.请参看图1,图1为本技术实施例提供的一种插电系统的结构示意图。如图2所示,为该插电系统的俯视结构示意图。该系统可应用于铁水运输载体的插电,主要由地的充电机构备和车载的受电机构组成。该系统具体可以包括但不限于:
47.充电机构,设置于地面安装架1上,包括伸缩组件2,伸缩组件2通过螺栓或者焊接的方式连接到地面安装架1上。
48.受电机构,设置于待充电运输载体上,包括受电单元8,用于与所述充电单元7对接,以对所述待充电运输载体进行充电;
49.控制器,设置于所述充电机构上,用于控制所述伸缩组件动作,以使所述充电单元7与所述受电单元8贴合进行充电,如图3所示,为插电系统的控制结构框图。
50.伸缩组件2的自由端设置有充电单元7,用于调节所述充电单元7与受电机构的距离;
51.具体地,伸缩组件2包括:
52.推杆和电机,电机与推杆传动连接,电机用于带动推杆动作,使得推杆能够水平移动,以实现推杆的伸缩,对于推杆的伸缩距离可通过控制器控制电机的行程实现。
53.伸缩组件2还包括:
54.缓冲器6,一端设置于所述推杆的自由端,另一端与所述充电单元7连接,用于对所述充电单元7提供弹性支撑,示例地,缓冲器6可以具有一定强度的弹簧,采用焊接的方式,将充电单元7与推杆的自由端连接,在充电单元7与受电单元8对接时,不需要其他固定力,伸缩组件2的推杆伸出并通过缓冲器6的缓冲加压使受电单元8和充电单元7贴合。因此,缓冲器6正面挤压充电单元7中的碳刷(位于充电单元7的最前端),可使碳刷与受电单元8紧密贴合,在此过程中,避免碳刷与车载导电滑触线的摩擦和碰撞过程,从而增加了碳刷的使用寿命。并且,根据检测到的不同距离,电机动作不同行程,再通过缓冲器6的缓冲,可避免充电单元7和受电单元8的正面刚性大力碰撞摩擦。
55.伸缩组件2还包括:
56.伸缩超行程检测单元4,用于检测所述推杆伸出的距离,并发送至所述控制器,以
使所述控制器控制所述电机启停,示例地,当伸缩超行程检测单元4单元检测到推杆伸出其界限距离时,可向控制器发送信号,以便控制器能够及时控制电机停止动作。
57.伸缩原点检测单元3,用于检测所述推杆的收缩位置,并发送至所述控制器,以使所述推杆收缩至原点,示例地,在推杆收缩时,可对推杆的收缩进程进行检测,以便控制器能够控制电机动作,使得推杆能够收缩至初始位置。
58.受电机构,设置于待充电运输载体(铁水运输载体)上,包括受电单元8,用于与所述充电单元7对接,以对所述待充电运输载体进行充电;
59.受电单元8可通过螺栓固定于绝缘隔离组件9上,绝缘隔离组件9通过螺栓固定于受电装置安装板11上,起到绝缘隔离作用。受电装置安装板11可通过螺栓固定于车载安装支架12上,车载安装支架12通过螺栓或者焊接等方式固定于铁水运输载体车架侧面。
60.受电单元8呈喇叭状,在对所述充电单元7进行对接充电时,处于半包裹状态。受电单元8与充电单元7对接后处于充电状态时,受电单元8的半包裹状态可提高充电时的安全性,可避免充电时存在的潜在人身安全的问题并可在空旷环境下有效对接触部位进行防水。
61.受电装置安装板11上还设置有测距反馈单元10,用于反馈到充电单元7的距离。
62.控制器,设置于所述充电机构上,用于控制所述伸缩组件动作,以使所述充电单元7与所述受电单元8贴合进行充电。
63.所述系统还包括:
64.测距单元5,设置于所述伸缩组件的自由端,且在竖直方向上与所述充电单元7齐平,用于检测到所述受电单元8的距离,以使所述控制器控制所述电机动作。
65.控制器可根据测距单元5反馈的测距结果,精准控制伸缩组件2的伸缩距离。
66.该系统还包括充电状态检测单元,可用于对充电状态进行实时检测,还可以设置蓄电池充电阈值,在判断达到充电阈值时,认为电池已经充满,可向控制器发送充电完成指令,以使控制器控制伸缩组件2动作,完成充电。
67.实施例2
68.本技术实施例提供一种插电控制方法,该方法应用于实施例1所述的控制器,如图4所示,为插电控制方法的流程图,具体包括以下步骤:
69.步骤s100:接收测距单元5发送的充电单元7到受电单元8之间的距离;
70.步骤s200:根据所述距离控制电机进行相应行程的动作,以使所述充电单元7与所述受电单元8贴合进行充电。
71.如图5所示,为另一种插电控制方法的流程图,所述方法还包括:
72.步骤s300:接收充电状态检测单元发送的充电完成指令;
73.步骤s400:根据所述充电完成指令控制所述电机动作,以使所述充电单元7与所述受电单元8断开。
74.如图6所示,为插电系统的运行流程图。地面管控系统可用于对铁水运输载体进行智慧调度,使铁水运输载体能快捷有效的到达指定位置进行充电;插电系统主要负责完成对载体车载电池的有效安全的充电。
75.具体地,地面管控系统向铁水运输载体下达控车指令,从而控制铁水运输载体到达指定充电位置,测距单元5用于检测受电单元8与充电单元7之间的距离并发送给控制器,
控制器接收到该实测距离后,控制伸缩组件2根据该实测距离动作,以使充电单元7和受电单元8对接并开始对铁水运输载体的蓄电池充电,在此过程中,可通过充电状态检测单元实时检测充电状态,在接收到充电状态检测单元发送的充电完成指令后,控制器控制伸缩组件2收缩至初始位置,完成充电。
76.此外,充电状态检测单元还可实时检测充电量、充电电流电压等充电状态,保证充电过程的安全可靠,同时将状态上传至地面管控系统和控制器;还可根据铁水运输载体车载电池的剩余电量判断铁水运输载体是否需要充电,提高电池的使用寿命。
77.本技术实施例还提供一种电子设备,所述电子设备包括存储器以及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行实施例2所述的插电控制方法。
78.本技术实施例还提供一种可读存储介质,所述可读存储介质中存储有计算机程序指令,所述计算机程序指令被一处理器读取并运行时,执行实施例2所述的插电控制方法。
79.在本技术所提供的几个实施例中,应该理解到,所揭露的装置和方法,也可以通过其它的方式实现。以上所描述的装置实施例仅仅是示意性的,例如,附图中的流程图和框图显示了根据本技术的多个实施例的装置、方法和计算机程序产品的可能实现的体系架构、功能和操作。在这点上,流程图或框图中的每个方框可以代表一个模块、程序段或代码的一部分,所述模块、程序段或代码的一部分包含一个或多个用于实现规定的逻辑功能的可执行指令。也应当注意,在有些作为替换的实现方式中,方框中所标注的功能也可以以不同于附图中所标注的顺序发生。例如,两个连续的方框实际上可以基本并行地执行,它们有时也可以按相反的顺序执行,这依所涉及的功能而定。也要注意的是,框图和/或流程图中的每个方框、以及框图和/或流程图中的方框的组合,可以用执行规定的功能或动作的专用的基于硬件的系统来实现,或者可以用专用硬件与计算机指令的组合来实现。
80.另外,在本技术各个实施例中的各功能模块可以集成在一起形成一个独立的部分,也可以是各个模块单独存在,也可以两个或两个以上模块集成形成一个独立的部分。
81.所述功能如果以软件功能模块的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本技术的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本技术各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:u盘、移动硬盘、只读存储器(rom,read-only memory)、随机存取存储器(ram,random access memory)、磁碟或者光盘等各种可以存储程序代码的介质。
82.以上所述仅为本技术的实施例而已,并不用于限制本技术的保护范围,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
83.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应所述以权利要求的保护范围为准。
84.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。