1.本发明涉及自动驾驶技术领域,具体涉及一种车辆低速蠕行时激活自适应巡航的控制方法。
背景技术:
2.自适应巡航系统(adaptive cruise control,以下简称acc)是一种以驾驶员设定车速为控制目标的智能化的自动控制系统。acc系统可根据前方是否有车,系统可以在跟车巡航和定速巡航之间自动切换。由于acc系统可以减轻驾驶员疲劳强度,能带来很大的驾驶娱乐性等优点,因此越来越受到驾驶员的欢迎。汽车电动化也是汽车发展的重要方向,电动车的占有率也越来越大,也逐渐被消费者接受,电动车搭载自适应巡航系统的比率也非常大。
3.目前电动车为了快速起步在低速蠕行过程中有较大的电机蠕行扭矩,此时激活acc系统会有巡航扭矩请求出现,需要电机实现扭矩切换,可能会出现车辆扭矩大幅波动,导致车辆抖动,为保证车辆不出现抖动,需要新的技术方案来此问题。
技术实现要素:
4.本发明针对现有技术中存在的技术问题,提供一种车辆低速蠕行时激活自适应巡航的控制方法,以解决电动车蠕行阶段激活acc功能车辆出现的抖动现象。
5.本发明解决上述技术问题的技术方案如下:
6.一种车辆低速蠕行时激活自适应巡航的控制方法,包括:
7.车辆处于低速蠕行状态时,实时判断自适应巡航系统的激活状态,若自适应巡航系统被激活,则车身稳定系统根据自适应巡航系统发送的加速度请求值激活车辆纵向控制系统计算与所述加速度请求值对应的驱动扭矩请求值;
8.整车控制单元以固定斜率降低蠕行扭矩值,并实时比较当前蠕行扭矩值与驱动扭矩请求值,并执行两者中的较大者以控制行车状态;当蠕行扭矩值小于等于驱动扭矩请求值时,则整车控制单元退出蠕行扭矩控制并执行驱动扭矩请求值。
9.进一步的,在以固定斜率降低蠕行扭矩值时,若制动控制模块激活,则整车控制单元退出蠕行扭矩控制。
10.进一步的,在整车控制单元退出蠕行扭矩控制后,持续判断车辆纵向控制模块的激活状态,若车辆纵向控制模块保持激活,则整车控制单元保持退出蠕行扭矩控制状态。
11.进一步的,在整车控制单元退出蠕行扭矩控制后,持续判断车辆纵向控制模块的激活状态,若车辆纵向控制模块退出激活状态,则整车控制单元执行蠕行扭矩控制。
12.本发明的有益效果是:整车控制单元在自适应巡航系统激活后以固定斜率降低蠕行扭矩,并执行蠕行扭矩和驱动扭矩请求值较大者,当蠕行扭矩值小于等于驱动扭矩请求值时,整车控制单元完全退出蠕行扭矩,并执行驱动扭矩请求值。此外,蠕行扭矩降低的过程中,若制动控制模块激活,车辆纵向控制系统会停止请求扭矩并主动增压制动,整车控制
单元会迅速完全退出蠕行扭矩控制,请求扭矩和实际扭矩全部为0,车辆表现为制动状态,不会出现抖动。该方法可明显改善实际扭矩变化幅度,实现扭矩舒适过渡,车辆无不适感。
附图说明
13.图1为本发明实施例提供的车辆各控制系统单元之间的控制逻辑框图;
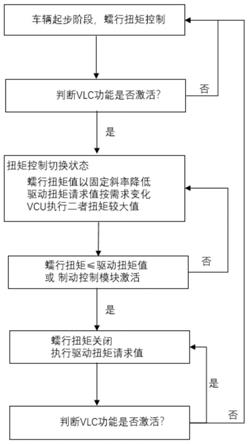
14.图2为本发明实施例提供的车辆低速蠕行时激活自适应巡航的控制方法流程示意图。
具体实施方式
15.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
16.自适应巡航控制系统(acc)通过毫米波雷达检测前方目标,当acc功能激活时,若前方无目标,则以设定的车速巡航行驶,若前方有目标,则跟随前车车速并保持一定距离跟车行驶。
17.纵向控制模块(vlc)包括制动控制模块(dc)和驱动控制模块(ec),vlc受整车控制单元(vcu)的控制对车辆进行制动或驱动。
18.在车辆处于起步阶段车速较低,acc未激活时,整车控制单元(vcu)处于蠕行扭矩控制状态。acc激活后,如图1图2所示,acc会根据实际工况发送加速度请求值ax,车身稳定系统(esc)接收acc请求的加速度值,通过激活纵向控制模块(vlc)计算与所述加速度请求值对应的驱动扭矩请求值,同时整车控制单元(vcu)以固定斜率降低蠕行扭矩控制值。
19.在蠕行扭矩降低的过程中,驱动扭矩请求值会根据实际需求变化,vcu持续比较蠕行扭矩值与驱动扭矩请求值的大小,并执行两者较大值,当蠕行扭矩值≤驱动扭矩请求值时,vcu完全退出蠕行扭矩,并执行驱动扭矩请求值。此外,蠕行扭矩降低的过程中,若制动控制模块激活,为防止制动驱动同时存在,vcu会迅速完全退出蠕行扭矩控制。
20.vcu退出蠕行扭矩控制后,持续判断vlc的激活状态,若vlc保持激活,则vcu保持退出蠕行扭矩控制状态,若vlc退出激活(acc退出),则vcu整车控制单元执行蠕行扭矩控制。
21.传统的处理方式中,vcu在acc激活后直接快速退出蠕行扭矩,但因此时驱动请求扭矩较小,导致实际扭矩快速降低再逐渐升高,实际扭矩波动较大,车辆出现抖动。本发明处理方式,vcu在acc激活后以固定斜率降低蠕行扭矩,并执行蠕行扭矩和驱动扭矩请求值较大者,当蠕行扭矩值≤驱动扭矩请求值时,vcu完全退出蠕行扭矩,并执行驱动扭矩请求值。此外,蠕行扭矩降低的过程中,若制动控制模块激活,vlc会停止请求扭矩并主动增压制动,vcu会迅速完全退出蠕行扭矩控制,请求扭矩和实际扭矩全部为0,车辆表现为制动状态,不会出现抖动。该方法可明显改善实际扭矩变化幅度,实现扭矩舒适过渡,车辆无不适感。
22.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种车辆低速蠕行时激活自适应巡航的控制方法,其特征在于,包括:车辆处于低速蠕行状态时,实时判断自适应巡航系统的激活状态,若自适应巡航系统被激活,则车身稳定系统根据自适应巡航系统发送的加速度请求值激活车辆纵向控制系统计算与所述加速度请求值对应的驱动扭矩请求值;整车控制单元以固定斜率降低蠕行扭矩值,并实时比较当前蠕行扭矩值与驱动扭矩请求值,并执行两者中的较大者以控制行车状态;当蠕行扭矩值小于等于驱动扭矩请求值时,则整车控制单元退出蠕行扭矩控制并执行驱动扭矩请求值。2.根据权利要求1所述的控制方法,其特征在于,在以固定斜率降低蠕行扭矩值时,若制动控制模块激活,则整车控制单元退出蠕行扭矩控制。3.根据权利要求1所述的控制方法,其特征在于,在整车控制单元退出蠕行扭矩控制后,持续判断车辆纵向控制模块的激活状态,若车辆纵向控制模块保持激活,则整车控制单元保持退出蠕行扭矩控制状态。4.根据权利要求3所述的控制方法,其特征在于,在整车控制单元退出蠕行扭矩控制后,持续判断车辆纵向控制模块的激活状态,若车辆纵向控制模块退出激活状态,则整车控制单元执行蠕行扭矩控制。
技术总结
本发明涉及一种车辆低速蠕行时激活自适应巡航的控制方法,包括:车辆处于低速蠕行状态时,实时判断自适应巡航系统的激活状态,若自适应巡航系统被激活,则车身稳定系统根据自适应巡航系统发送的加速度请求值激活车辆纵向控制系统计算与所述加速度请求值对应的驱动扭矩请求值;整车控制单元以固定斜率降低蠕行扭矩值,并实时比较当前蠕行扭矩值与驱动扭矩请求值,并执行两者中的较大者以控制行车状态;当蠕行扭矩值小于等于驱动扭矩请求值时,则整车控制单元退出蠕行扭矩控制并执行驱动扭矩请求值。该方法可明显改善实际扭矩变化幅度,实现扭矩舒适过渡,车辆无不适感。车辆无不适感。车辆无不适感。
技术研发人员:任志刚 付斌 刘继峰 周火星 余龙
受保护的技术使用者:岚图汽车科技有限公司
技术研发日:2021.11.03
技术公布日:2022/1/28