1.本发明涉及自动驾驶领域,特别涉及一种基于高精度地图的自适应巡航系统及其控制方法。
背景技术:
2.随着智能化的发展,电子产品技术的成熟,驾驶辅助系统依靠其舒适性、安全性得到迅速的推广。伴随着中国基础设施的普及,道路条件的提升,自适应巡航系统的应用越来越普及。自适应巡航系统可以解放驾驶员的双脚,通过系统自动控制车辆的制动和加速,大大缓解驾驶员的压力。
3.然而,在自适应巡航系统中,由于道路多变,道路的坡度增加系统的控制难度;同时,当车辆需要进行转弯时,自适应巡航系统由于减速过弯,导致过弯时速度过大,存在安全隐患,需要驾驶员接管车辆。为使系统具有更好的舒适性和弯道性能表现,本发明提供一种基于高精度地图的自适应巡航系统控制方法和系统。
技术实现要素:
4.本发明为了解决上述现有技术中存在问题,提供一种基于高精度地图的自适应巡航系统,以解决现在的技术问题。
5.本发明解决其技术问题所采用的技术方案是:
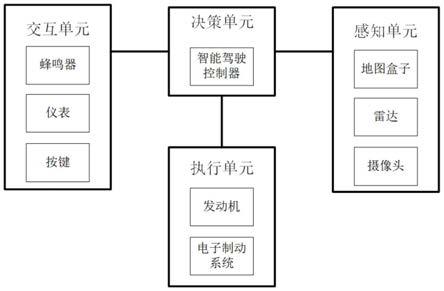
6.本发明提供了一种基于高精度地图的自适应巡航系统及其控制方法,包括:决策单元、感知单元、交互单元、执行单元及信息传递单元,所述决策单元通过信息传递单元及感知单元、感知单元、交互单元相连接,所述决策单元包括智能驾驶控制器,所述智能驾驶控制器根据感知单元得到道路信息,所述智能驾驶控制器根据执行单元得到本车车辆的信息,所述的智能驾驶控制器根据交互单元得到驾驶员对车辆的设定信息。
7.优选的,所述感知单元包括地图盒子、雷达、摄像头,所述地图盒子用以提供当前道路起点至未来500m的道路坡度信息,道路曲率信息,所述雷达和摄像头通过信息融合提供目标车辆的速度信息、加速度信息、距离信息以及当前道路的限速信息。
8.优选的,所述执行单元包括发动机和电子制动系统,所述发动机提供信息包括发动机真实扭矩、发动机转速,所述电子制动系统提供的信息包括车辆实际车速、车辆实际加速度、车辆实际轮速、车辆防抱死系统状态,所述发动机接收智能驾驶控制器的发动机请求扭矩,所述电子制动系统接收智能驾驶控制器的车辆制动减速度信息。
9.优选的,所述交互单元包括蜂鸣器、仪表和按键,当自适应巡航系统异常退出时,所述蜂鸣器报警请求驾驶员接管车辆,所述仪表显示车辆的设定车速、设定的距离模式、目标车车速、目标车距离、驾驶员接管车辆、自适应巡航系统状态,所述按键包括自适应巡航系统开关按键、距离模式设定按键、设定车速按键。
10.优选的,包括:
11.step1:系统自检:车辆上电,智能驾驶系统进行系统自检,当系统自检出现异常
时,自适应巡航系统无法工作;当系统自检无异常时,执行step2;
12.step2:自适应巡航:驾驶员通过交互单元按下功能启动键,自适应巡航系统工作,自适应巡航系统实时监测当前道路有无目标车辆,当自适应巡航系统监测到当前道路有目标车辆时,执行step3;
13.step3:跟车模式:自适应巡航系统进入跟车模式,自适应巡航系统实时监测当前道路有无目标车辆,当自适应巡航系统监测到当前道路无目标车辆时,执行step2。
14.优选的,在自适应巡航系统工作的过程中,当车辆异常导致系统退出时,所述决策单元中的智能驾驶控制器通过信息传递单元中的can线将报警信号传递至交互单元中的蜂鸣器和仪表,此时蜂鸣器报警,仪表提示驾驶员接管车辆。
15.优选的,所述自适应巡航包括:雷达和摄像头未监测到目标车辆时,系统以驾驶员设定车速v
set
行驶,在以设定车速行驶的过程中,摄像头监控道路的限制车速v1
max
;地图盒子得到当前道路至未来500m的曲率信息,当监测到车辆在未来500m需要过弯时,根据过弯处最大的曲率,会使车辆的横向加速度的绝对值不超过额定值a
max
,此时得到车辆限制车速v2
max
。当驾驶员设定车速行驶v
set
低于道路限制限制车速v1
max
和弯道限制车速v2
max
时,车辆以驶员设定车速行驶v
set
行驶;当驾驶员设定车速行驶v
set
高于道路限制车速v1
max
低于弯道限制车速v2
max
时,车辆缓慢降低至道路限制限制车速v1
max
行驶;当驾驶员设定车速行驶v
set
高于弯道限制车速v2
max
低于道路限制车速v1
max
时,车辆缓慢降低至弯道限制车速v2
max
行驶;当驾驶员设定车速v
set
高于道路限制车速v1
max
和弯道限制车速v2
max
时,车辆缓慢降低至道路限制车速v1
max
和弯道限制车速v2
max
的最小值;自适应巡航系统实时监测当前道路有无目标车辆,当出现目标车辆时,自适应巡航系统切换到跟车模式行驶。
16.优选的,所述跟车模式包括:车辆根据驾驶员设定车速v
set
、驾驶员设定距离模式、前车车速、前车车距,得到车辆的目标跟车车速v
fol
,车辆在以目标跟车车速v
fol
行驶时,摄像头监控道路的限制车速v1
max
;地图盒子得到当前道路至未来500m的曲率信息,当监测到车辆在未来500m需要过弯时,根据过弯处最大的曲率,会使车辆的横向加速度的绝对值不超过额定值a
max
,此时得到车辆限制车速v2
max
。当车辆的目标跟车车速v
fol
低于道路限制限制车速v1
max
和弯道限制车速v2
max
时,车辆以目标跟车车速v
fol
行驶;当车辆的目标跟车车速v
fol
高于道路限制车速v1
max
低于弯道限制车速v2
max
时,车辆缓慢降低至道路限制限制车速v1
max
行驶;当车辆的目标跟车车速v
fol
高于弯道限制车速v2
max
低于道路限制车速v1
max
时,车辆缓慢降低至弯道限制车速v2
max
行驶;当车辆的目标跟车车速v
fol
高于道路限制车v2
max
的最小值,自适应巡航系统实时监测当前道路有无目标车辆,当当前道路无目标车辆时,自适应巡航系统切换到自适应巡航模式行驶。
17.优选的,所述自适应巡航系统在跟车模式中,根据本车实际车速、目标车车速、目标车距离、驾驶员设定的距离模式信息,进行目标加速度求解,求解公式如下:
[0018][0019]
式中:a
max
为本车最大加速度;
[0020]
vn为本车实际车速;
[0021]vmax
为本车期望车速;
[0022]
s(vn,δvn)为期望跟车距离;
[0023]
sn为本车距目标车的实际距离;
[0024]
加速度求解完成后,根据车辆的目标加速度,进行车辆的加速控制或减速控制。
[0025]
本发明的有益效果是:
[0026]
(1)可以提高车辆在坡道行驶时的性能表现;
[0027]
(2)当车辆需要经过弯道时,自适应巡航系统提前降低至安全车速,增加弯道通过性,提高车辆的舒适性和安全性,减轻驾驶员的负担;
[0028]
(3)在限速路段,车辆进行自主调节车速,防止车辆出现超速行驶情况,降低车辆的违章风险。
附图说明
[0029]
本发明的上述的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
[0030]
图1是本发明实施例的基于高精度地图的自适应巡航系统的结构示意图;
[0031]
图2是本发明实施例的基于高精度地图的自适应巡航系统的控制逻辑示意图;
[0032]
图3是本发明实施例的基于高精度地图的自适应巡航系统的发动机控制原理图。
具体实施方式
[0033]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0034]
本发明提供一种基于基于高精度地图的自适应巡航控制方法和系统,以解决现有技术中自适应巡航系统的过弯行驶稳定性差,燃油经济性的问题。
[0035]
本发明提供一种基于基于高精度地图的自适应巡航系统,包括:决策单元、感知单元、交互单元、执行单元及信息传递单元。决策单元通过信息传递单元与执行单元、感知单元、交互单元相连接。所述的决策单元主要包括智能驾驶控制器,所述的智能驾驶控制器根据所述的感知单元得到道路信息,道路信息包括当前及前方道路的曲率信息、坡度信息、目标车辆的速度信息、目标车辆的距离信息、目标车辆的加速度信息等;所述的智能驾驶控制器根据所述的执行单元得到本车车辆的信息,本车车辆的信息包括本车的实际车速、实际加速度、实际的发动机扭矩、实际的车辆防抱死状态信息等;所述的智能驾驶控制器根据所述的交互单元得到驾驶员对车辆的设定信息,设定信息包括是否激活自适应巡航系统、自适应巡航系统的设定车速、自适应巡航系统的距离模式等信息。
[0036]
所述的感知单元包括地图盒子、雷达、摄像头。地图盒子用以提供当前道路起点至未来500m的道路坡度信息,道路曲率信息;雷达和摄像头通过信息融合,用以提供目标车辆的速度信息、加速度信息、距离信息以及当前道路的限速信息等。
[0037]
所述的执行单元包括发动机和电子制动系统。发动机提供信息包括发动机真实扭矩、发动机转速等信息;电子制动系统提供的信息包括车辆实际车速、车辆实际加速度、车辆实际轮速、车辆防抱死系统状态信息等。同时,发动机接收智能驾驶控制器的发动机请求扭矩,电子制动系统接收智能驾驶控制器的车辆制动减速度信息。
[0038]
所述的交互单元包括蜂鸣器、仪表和按键。自适应巡航系统异常退出时,会通过蜂鸣器报警请求驾驶员接管车辆;仪表显示车辆的设定车速、设定的距离模式、目标车车速、目标车距离、驾驶员接管车辆、自适应巡航系统状态等信息;按键包括自适应巡航系统开关按键、距离模式设定按键、设定车速按键等。所述的信息传递单元是车辆的can总线,用以传递上述各单元之间的信息。
[0039]
本发明实施例提供一种基于基于高精度地图的自适应巡航控制方法,包括:
[0040]
车辆上电,智能驾驶系统进行系统自检,当智能驾驶控制器出现异常时,交互单元的仪表显示系统异常,自适应巡航系统无法工作;当感知单元的雷达和摄像头同时出现故障时,交互单元的仪表显示系统异常,自适应巡航系统无法工作;当执行单元的发动机或电子制动系统出现异常时,交互单元的仪表显示发动机或电子制动系统异常,自适应巡航系统无法工作;当感知单元的地图盒子或雷达或摄像头出现异常时,系统降级,自适应巡航系统激活后可工作,但部分功能无法工作,具体如下:
[0041]
当地图盒子出现异常时,系统无法监测到前方道路的曲率信息,系统无法因前方需要过弯而进行提前降速准备;
[0042]
当摄像头出现异常时,系统无法监测到道路限速牌,系统无法尹前方限速牌而进行提前降速,同时,自适应巡航系统进行功能降级,系统只能对运动车辆进行识别,对运动车辆进行跟车处理;
[0043]
当雷达出现异常时,自适应巡航系统无法工作,系统进行缓退。
[0044]
当系统无故障时,待驾驶员通过交互单元按下功能启动键,自适应巡航系统工作。
[0045]
雷达和摄像头未监测到目标车辆时,系统以驾驶员设定车速v
set
行驶,在以设定车速行驶的过程中,摄像头会监控道路的限制车速v1
max
;地图盒子会得到当前道路至未来500m的曲率信息,为使车辆具有良好的性能表现,防止车辆失稳,当监测到车辆在未来500m需要过弯时,根据过弯处最大的曲率,会使车辆的横向加速度的绝对值不超过额定值(a
max
),此时得到车辆限制车速v2
max
。当驾驶员设定车速行驶v
set
低于道路限制限制车速v1
max
和弯道限制车速v2
max
时,车辆以驶员设定车速行驶v
set
行驶;当驾驶员设定车速行驶v
set
高于道路限制车速v1
max
低于弯道限制车速v2
max
时,车辆缓慢降低至道路限制限制车速v1
max
行驶;当驾驶员设定车速行驶v
set
高于弯道限制车速v2
max
低于道路限制车速v1
max
时,车辆缓慢降低至弯道限制车速v2
max
行驶;当驾驶员设定车速v
set
高于道路限制车速v1
max
和弯道限制车速v2
max
时,车辆缓慢降低至道路限制车速v1
max
和弯道限制车速v2
max
的最小值。同时,自适应巡航系统会实时监测当前道路有无目标车辆,当出现目标车辆时,系统会切换到跟车模式行驶。
[0046]
雷达和摄像头监测到目标车辆时,自适应巡航系统进入跟车模式。此时车辆根据驾驶员设定车速v
set
、驾驶员设定距离模式、前车车速、前车车距,得到车辆的目标跟车车速v
fol
,车辆在以目标跟车车速v
fol
行驶时,摄像头会监控道路的限制车速v1
max
;地图盒子会得到当前道路至未来500m的曲率信息,为使车辆具有良好的性能表现,防止车辆失稳,当监测到车辆在未来500m需要过弯时,根据过弯处最大的曲率,会使车辆的横向加速度的绝对值不超过额定值(a
max
),此时得到车辆限制车速v2
max
。当车辆的目标跟车车速v
fol
低于道路限制限制车速v1
max
和弯道限制车速v2
max
时,车辆以目标跟车车速v
fol
行驶;当车辆的目标跟车车速v
fol
高于道路限制车速v1
max
低于弯道限制车速v2
max
时,车辆缓慢降低至道路限制限制
车速v1
max
行驶;当车辆的目标跟车车速v
fol
高于弯道限制车速v2
max
低于道路限制车速v1
max
时,车辆缓慢降低至弯道限制车速v2
max
行驶;当车辆的目标跟车车速v
fol
高于道路限制车v2
max
的最小值。同时,自适应巡航系统会实时监测当前道路有无目标车辆,当当前道路无目标车辆时,系统会切换到巡航模式行驶。
[0047]
在自适应巡航系统工作的过程中,如果车辆异常导致系统退出时,决策单元中的智能驾驶控制器通过信息传递单元中的can线将报警信号传递至交互单元中的蜂鸣器和仪表,此时蜂鸣器报警,仪表提示驾驶员接管车辆。
[0048]
进一步的,自适应巡航系统在跟车行驶过程中,会根据本车实际车速、目标车的车速、目标车的距离、驾驶员设定的距离模式等信息,进行目标加速度求解,求解公式如下:
[0049][0050]
式中:a
max
为车辆最大加速度;
[0051]
vn为本车实际车速;
[0052]vmax
为本车期望车速;
[0053]
s(vn,δvn)为期望跟车距离;
[0054]
sn为本车距目标车的实际距离。
[0055]
加速度求解完成后,根据车辆的目标加速度,进行车辆的加速控制或减速控制。
[0056]
在加速控制的过程中,需要求解车辆的发动机请求扭矩。在发动机请求扭矩求解过程中,根据车辆的目标加速度,结合车辆运动学模型,得到车辆的需求扭矩;根据高精度地图得到的当前道路坡度信息、车辆自身的风阻系数、发动机转速、变速箱速比等,通过车辆运动学公式得到车辆产生坡道阻力、风阻、滚动阻力等,根据车辆需求扭矩和坡道阻力、风阻、滚动阻力等信息得到发动机需求扭矩;为使系统具有良好的响应效果,根据车辆实际加速度和车辆目标加速度的插值进行pid控制器调节,从而得到发动机修正扭矩值。将发动机需求扭矩和发动机修正扭矩的累加作为发动机请求扭矩,通过信息传递单元将发动机请求扭矩信息传递到发动机中,从而对车辆发动机进行控制。
[0057]
在减速控制的过程中,由于电子制动系统具有良好的性能表现,将车辆实际需求减速度通过信息传递单元中的can线发送至电子制动系统。
[0058]
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。