1.本发明涉及电动汽车自适应巡航控制领域。
背景技术:
2.汽车的电动化在向深度发展,未来汽车市场的竞争的焦点是电动汽车的智能化和网联化。自适应巡航控制(acc)作为电动汽车智能化最重要的功能,对于降低疲劳驾驶,提高行车安全有着关键作用。与此同时,制约电动汽车当前发展,也是电动汽车普及过程中的一大障碍就是续航焦虑。面对这一困境,提升续航里程和保证智能化成为车辆研发工程师重点工作。而目前现状是车辆稳定控制系统(esc)供应商提供的自适应巡航系统都是基于传统汽油车而来,很多电动汽车的自适应巡航过程中依赖esc增加液压制动力来降低车速,而不是优先选择电机的能量回收实现减速,这势必严重缩减了车辆的续航里程。
3.因此,acc减速时如何提供一种分配制动扭矩的方法,提高车辆续航里程,保证安全行驶起着重要作用。
技术实现要素:
4.为了解决现有技术的问题,本发明提供了一种电动汽车acc制动扭矩分配方法,通过计算出目标减速度、车辆能量回收能力、减速度分配以及制动减速度过程中的安全监控,确保车辆减速过程中电机能够参与整车制动,在电机制动能力不足的情况下,esc液压制动介入,从而提高车辆续航里程,优化能量分配。
5.本发明提供了一种电动汽车自适应巡航控制的扭矩分配方法,所述方法包括:
6.根据当前车辆车速、电机转速以及坡度传感器信号,计算出当前车辆真实的加速度和车辆行驶阻力;
7.根据电动汽车电池的当前荷电状态、温度、单体电压计算出当前车速下的电池可允许能量回收扭矩;
8.取电池可允许能量回收扭矩和电机可允许能量回收扭矩两者较小值后,减去所述车辆行驶阻力,得到车辆允许的能量回收减速度;
9.根据车辆相对距离、相对车速、驾驶员设置车速、所述当前车辆车速以及设置时距计算滤波前的目标减速度;
10.对滤波前的目标减速度进行滤波,得到滤波后的目标减速度;
11.滤波后的目标减速度加上滤波差得到电机能量回收减速度;
12.比较所述电机能量回收减速度与所述车辆允许的能量回收减速度,以得到扭矩分配策略。
13.在一个实施例中,所述比较所述电机能量回收减速度与所述车辆允许的能量回收减速度,以得到扭矩分配策略的步骤包括:
14.若所述电机能量回收减速度低于所述车辆允许的能量回收减速度,则整车减速完全由电机能量回收制动实现,液压制动不介入;
15.若所述电机能量回收减速度不低于所述车辆允许的能量回收减速度,则整车减速一部分由电机能量回收制动实现,另一部分由电子稳定控制系统执行液压制动介入,其中,液压制动介入所提供的液压制动减速度为滤波前的目标减速度减去电机实际能量回收减速度。
16.在一个实施例中,所述比较所述电机能量回收减速度与所述车辆允许的能量回收减速度,以得到扭矩分配策略的步骤还包括:
17.当检测到所述当前车辆车速也逐渐减速时,所述电机实际能量回收减速度逐渐减小,液压制动介入逐渐增大,直至所述当前车辆车速为0时,整车保持静止状态完全由液压制动完成,所述电机能量回收制动退出。
18.在一个实施例中,所述电子稳定控制系统执行液压制动介入包括:
19.实时监控自适应巡航控制回馈制动时电机输出负扭矩,当自适应巡航控制请求制动扭矩在一定时间段内的误差积分值超过第一阀值,则请求电子稳定控制系统介入液压制动;或监控电子稳定控制系统请求减速度与当前整车减速度不一致时,通过一定时间段内的误差积分值超过第二阀值,则请求电子稳定控制系统介入液压制动。
20.在一个实施例中,所述当前车辆真实的加速度通过计算车辆车速信号变化率得到。
21.在一个实施例中,所述车辆行驶阻力由所述车辆车速信号和坡度传感器信号根据行驶阻力公式计算得到。
22.在一个实施例中,所述电机转速信号用于折算成车速信号与车辆车速信号进行校核。
23.在一个实施例中,所述电机可允许能量回收扭矩通过电机控制器发送到can总线获取。
24.在一个实施例中,所述滤波差为所述滤波后的目标减速度减去所述滤波前的目标减速度。
附图说明
25.本发明的以上发明内容以及下面的具体实施方式在结合附图阅读时会得到更好的理解。需要说明的是,附图仅作为所请求保护的发明的示例。在附图中,相同的附图标记代表相同或类似的元素。
26.图1示出根据本发明一实施例的电动汽车自适应巡航控制的扭矩分配策略(制动减速度分配策略);
27.图2示出根据本发明一实施例的电动汽车自适应巡航控制的扭矩分配方法流程图。
具体实施方式
28.以下在具体实施方式中详细叙述本发明的详细特征以及优点,其内容足以使任何本领域技术人员了解本发明的技术内容并据以实施,且根据本说明书所揭露的说明书、权利要求及附图,本领域技术人员可轻易地理解本发明相关的目的及优点。
29.本发明提供了一种电动汽车acc制动扭矩分配方法,通过计算出目标减速度、车辆
能量回收能力、减速度分配以及制动减速度过程中的安全监控,确保车辆减速过程中电机能够参与整车制动,在电机制动能力不足的情况下,esc液压制动介入。从而提高车辆续航里程,优化能量分配。
30.本发明的acc制动扭矩分配方法涉及以下设备:摄像头、雷达、adas(驾驶辅助控制器)、esc(电子稳定控制系统)以及驱动电机。摄像头和雷达识别车辆周围环境,通过融合算法后将前方车辆的距离、相对速度和运动状态通过can网络发送给adas控制器;adas控制器实现acc制动扭矩分配策略,优化acc功能;esc提供制动液压压力,响应adas控制器制动压力请求,实现制动液压系统实现整车制动;驱动电机响应adas请求驱动和能量回收的功能,实现车辆行驶或制动。
31.adas控制器根据车辆车速信号、电机转速信号以及坡度传感器信号,计算出当前车辆真实的加速度和车辆行驶阻力。当前车辆真实的加速度计算方式根据车辆车速信号变化率得到,即一段时间内的车速变化值;车辆行驶阻力由车速和坡度信号根据行驶阻力公式计算得到。其中电机转速可以折算成车速信号与车辆车速信号进行校核。
32.车辆能量回收能力计算方式如下:根据电池的当前荷电状态(soc)、温度、单体电压等信息计算出电池可允许充电功率,通过功率转扭矩公式,得到当前车速下电池可允许能量回收扭矩;电机可允许能量回收扭矩根据电机控制器发送到can获取,其中电机可允许能量回收扭矩在不同车速有不同的限制扭矩值,满足电机外特性特点。分别用电池可允许能量回收扭矩和电机可允许能量回收扭矩取较小值减去车辆行驶阻力根据扭矩转加速度公式得到车辆允许的能量回收减速度。
33.目标减速度根据车辆相对距离、相对车速、驾驶员设置车速、当前车速以及设置时距计算目标减速度。acc速度模式即定速巡航模式,根据驾驶员设置车速得到目标加速度,当驾驶员设置车速低于当前车速时,acc会进入减速状态;acc距离模式,是自车检测到前方有车辆,根据前方车辆相对车速和相对距离计算得到,当自车车速高于前车车速,且相对距离较近的情况下,acc会进入减速状态。
34.为防止目标减速度在速度模式和距离模式来回切换而产生的跳变,需要对目标减速度进行滤波处理。将滤波后的目标减速度用于液压制动和电机能量回收之间的分配。如图1所示,分配的原则是优先使用电机能量回收,电机能量回收减速度不足达不到目标减速度,需要液压制动介入。具体地,电机能量回收减速度根据滤波后的目标减速度加上滤波差得到,其中,滤波差即滤波后的减速度减去滤波前的减速度。根据电机能量回收减速度是否低于上述计算的车辆允许的能量回收减速度,若低于车辆允许的能量回收减速度,则整车减速完全由电机实现,液压制动不介入;若高于车辆允许的能量回收减速度,则整车减速一部分由电机实现,滤波前目标减速度减去电机当前实际能量回收减速度,得到液压制动减速度,由esc完成制动执行机构液压制动。当检测到自车车速也逐渐减速时,电机实际能量回收减速度逐渐减小,液压制动介入逐渐增大,至车速为0时,整车保持静止状态完全由液压制动完成,电机能量回收制动退出。
35.整车减速过程中安全监控系统,用于实时监控acc回馈制动时电机输出负扭矩,整acc请求制动扭矩在一定时间段内的误差积分值超过一定阀值,监控系统请求esc介入液压制动;监控acc请求减速度与当前整车减速度不一致时,通过一定时间段内的误差积分值超过一定阀值,监控系统请求esc介入液压制动。通过监控监控系统确保电机扭矩控制一定合
理范围,保证行驶安全,同时提高esc液压制动补偿可靠性。
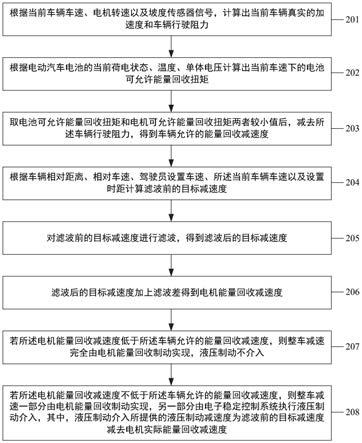
36.图2示出根据本发明一实施例的电动汽车自适应巡航控制的扭矩分配方法流程图。该方法包括,但不限于,以下步骤:
37.步骤201:根据当前车辆车速、电机转速以及坡度传感器信号,计算出当前车辆真实的加速度和车辆行驶阻力;
38.步骤202:根据电动汽车电池的当前荷电状态、温度、单体电压计算出当前车速下的电池可允许能量回收扭矩;
39.步骤203:取电池可允许能量回收扭矩和电机可允许能量回收扭矩两者较小值后,减去所述车辆行驶阻力,得到车辆允许的能量回收减速度;
40.步骤204:根据车辆相对距离、相对车速、驾驶员设置车速、所述当前车辆车速以及设置时距计算滤波前的目标减速度;
41.步骤205:对滤波前的目标减速度进行滤波,得到滤波后的目标减速度;
42.步骤206:滤波后的目标减速度加上滤波差得到电机能量回收减速度;
43.步骤207:若所述电机能量回收减速度低于所述车辆允许的能量回收减速度,则整车减速完全由电机能量回收制动实现,液压制动不介入;
44.步骤208:若所述电机能量回收减速度不低于所述车辆允许的能量回收减速度,则整车减速一部分由电机能量回收制动实现,另一部分由电子稳定控制系统执行液压制动介入,其中,液压制动介入所提供的液压制动减速度为滤波前的目标减速度减去电机实际能量回收减速度。
45.本发明提供了一种电动汽车自适应巡航控制的扭矩分配方法,所述方法包括:
46.根据当前车辆车速、电机转速以及坡度传感器信号,计算出当前车辆真实的加速度和车辆行驶阻力;
47.根据电动汽车电池的当前荷电状态、温度、单体电压计算出当前车速下的电池可允许能量回收扭矩;
48.取电池可允许能量回收扭矩和电机可允许能量回收扭矩两者较小值后,减去所述车辆行驶阻力,得到车辆允许的能量回收减速度;
49.根据车辆相对距离、相对车速、驾驶员设置车速、所述当前车辆车速以及设置时距计算滤波前的目标减速度;
50.对滤波前的目标减速度进行滤波,得到滤波后的目标减速度;
51.滤波后的目标减速度加上滤波差得到电机能量回收减速度;
52.比较所述电机能量回收减速度与所述车辆允许的能量回收减速度,以得到扭矩分配策略。
53.在一个实施例中,所述比较所述电机能量回收减速度与所述车辆允许的能量回收减速度,以得到扭矩分配策略的步骤包括:
54.若所述电机能量回收减速度低于所述车辆允许的能量回收减速度,则整车减速完全由电机能量回收制动实现,液压制动不介入;
55.若所述电机能量回收减速度不低于所述车辆允许的能量回收减速度,则整车减速一部分由电机能量回收制动实现,另一部分由电子稳定控制系统执行液压制动介入,其中,液压制动介入所提供的液压制动减速度为滤波前的目标减速度减去电机实际能量回收减
速度。
56.在一个实施例中,所述比较所述电机能量回收减速度与所述车辆允许的能量回收减速度,以得到扭矩分配策略的步骤还包括:
57.当检测到所述当前车辆车速也逐渐减速时,所述电机实际能量回收减速度逐渐减小,液压制动介入逐渐增大,直至所述当前车辆车速为0时,整车保持静止状态完全由液压制动完成,所述电机能量回收制动退出。
58.在一个实施例中,所述电子稳定控制系统执行液压制动介入包括:
59.实时监控自适应巡航控制回馈制动时电机输出负扭矩,当自适应巡航控制请求制动扭矩在一定时间段内的误差积分值超过第一阀值,则请求电子稳定控制系统介入液压制动;或监控电子稳定控制系统请求减速度与当前整车减速度不一致时,通过一定时间段内的误差积分值超过第二阀值,则请求电子稳定控制系统介入液压制动。
60.在一个实施例中,所述当前车辆真实的加速度通过计算车辆车速信号变化率得到。
61.在一个实施例中,所述车辆行驶阻力由所述车辆车速信号和坡度传感器信号根据行驶阻力公式计算得到。
62.在一个实施例中,所述电机转速信号用于折算成车速信号与车辆车速信号进行校核。
63.在一个实施例中,所述电机可允许能量回收扭矩通过电机控制器发送到can总线获取。
64.在一个实施例中,所述滤波差为所述滤波后的目标减速度减去所述滤波前的目标减速度。
65.这里采用的术语和表述方式只是用于描述,本发明并不应局限于这些术语和表述。使用这些术语和表述并不意味着排除任何示意和描述(或其中部分)的等效特征,应认识到可能存在的各种修改也应包含在权利要求范围内。其他修改、变化和替换也可能存在。相应的,权利要求应视为覆盖所有这些等效物。
66.同样,需要指出的是,虽然本发明已参照当前的具体实施例来描述,但是本技术领域中的普通技术人员应当认识到,以上的实施例仅是用来说明本发明,在没有脱离本发明精神的情况下还可做出各种等效的变化或替换,因此,只要在本发明的实质精神范围内对上述实施例的变化、变型都将落在本技术的权利要求书的范围内。