1.本发明涉及一种自行车,特别是涉及水平脚踏板操控四边形外拐与内拐自动定时张合自行车。
背景技术:
2.目前国内外人力常规自行车,均为单杆脚拐臂,且定长而不能伸缩,更不能利用始终接近于水平缓转(即自转)的脚踏板,来操控自行车脚拐臂,实施定时定位地折叠式张伸合拢工作方式,尤其是脚拐臂伸缩量,未能满足于骑车人两腿舒适度前提下的峰值。更没有脚踏板操控力四边形的外拐,与其端头绞结内拐发生定时定位张合脚拐臂(长力臂杆)自行车问世。于是山东定陶县(原新疆策勒袁梧伦)利用本人发明专利(申请号202110317399.6单人骑相当于多人蹬长力臂杆操控高速自行车)进行实操结构优化,原理升级,来克服本专利原理存在着“无用功大,且蹬车力在机械传动中损失特大,导致于有用功利用率低,”技术上缺陷(实为利用与中轴同向同频同步副轴上后拐联动,使后端外拐与内拐绞结的工作方式,在施力区里自动先伸长后折叠缩短,在非施力区里先自动合拢折叠重合,后自动由重合到张伸的动作原理)。由于本专利脚拐臂总成,(长力臂杆实为外拐,l型脚拐臂实为内拐,后拐实为副轴上拔杆),是由后拐操控外拐与内拐定时张合,在实操过程中,由于《大量》的能量损失在后轴(即副轴)从动传导上尤其是在内拐外端处于“上点”到“下点”这个导力施力过程中,特别明显,故本人原发明专利实用性能差,主有动作可靠,结构简单,原理正确,传导过程中能量《利用率》高的此发明专利出炉。采用水平脚踏板缓转联动力四边形外拐与异面直线型内拐,其端头的外拐与内拐绞结处定向限位牙轮及脚踏板自转缓解连体超越转轮,共同作用操控力四边形,确保外拐始终在转动过程中,处于纵横竖三维上平动,实施脚拐臂总成自动定时定位张伸或折叠合拢。其效果是单人骑相当于多人同时蹬踏,且骑行舒适度和骑行方式与常规人力自行车基本上相同的高速自行车问世(本人已经实验完毕,有样车)
技术实现要素:
3.本发明水平脚踏板操控四边形外拐与内拐自动定时定位张合自行车的目的,为克服现有技术上的缺陷,提供一种利用人蹬车时,受迫脚踏板始终接近于水平缓转动态中的静态的工作面,时而前方导力,时而后方导力的工作方式,借助于超越转轮和定向限位牙轮传动,来操作力四边形的外拐与异面直线型的内拐,在其各自端头绞结处,实施脚拐臂总成定时定位自动地折叠收缩合拢或定时定位自动地伸张,且确保力四边形的外拐,始终接近于水平的状态。
4.作为优化,异面直线型的内拐,内端固联在自行车中轴一端上,其外端为“异面直线”型,“异面直线”公共垂直线,实为内拐与力四边形总成中的外拐的绞结轴,两拐绞结轴套装在力四边形的外拐外端固装的轴承内孔里,空芯的定向限位牙轮却套装此轴承外圆周上,且联体于外拐外端上,如此设计,实现了脚踏板在施力区(内拐外端处于“上点”到“下
点”半周区间为施力区)里操控力四边形的外拐,与异面直线型内拐自动伸张和自动折叠合拢的动作灵活自如。同时确保了在非施力区里(异面直线型内拐外端处于“下点”到“上点”半周区间为非施力区),脚拐臂总成,借助于定向限位牙轮作用,受迫于中轴对侧脚拐臂总成联动,灵活自如地使外拐与内拐自动定时定位自动折叠合拢到重合及自动地由重合到自动张开。
5.作为优化,脚踏板固联在超越转轮的转轮外壳上,超越转轮的轮墩内孔,套装在力四边形外拐总成脚踏板转轴外端上,脚踏板转轴内端镶嵌在力四边形外拐外端固联轴承内孔里,如此设计,实现了脚踏板在施力区里,使前踏之力的作用,在力四边形外拐总成上传导过程中,借助于超越转轮与定向限位牙轮作用,能自动瞬间反向于中轴转向的自旋,确保了脚踏板始终接近于水平的目的。同时确保了在非施力区里,受迫于中轴对侧脚拐臂总成联动的力四边形外拐总成的脚踏板,借助于定向限位牙轮和超越转轮作用,使脚踏板始终接近于水平动态中的静态。
6.作为优化,脚踏板联体超越转轮轴(实为脚踏板轴)中央垂直固联有小拔杆,小拔杆上端与导杆绞结,导杆另一端绞结在异面直线型的内拐外端上,如此设计,实现了脚踏板操控力四边形外拐总成联动异面直线型内拐绕中轴公转一周,其内拐外端上与导杆绞结点随之旋转一周,联动导杆边绕中轴公转一周,边使导杆倾斜前后摆动各一次目的,同时确保了脚踏板轴边绕中轴公转一周,边受迫于脚踏板及超越转轮操控。各自“正反”小于180度大于90度来回自旋一次(由于脚踏板轴上垂直固联小拔杆长度大于异面直线型内拐外端配装的小拔杆长度)
7.作为优化,空芯定向限位牙轮固装在力四边形外拐总成的外拐内端(即后端)内侧上,与空芯定向限位牙轮啃合匹配的马牙起启爪的转轴,固装在异面直线型内拐的外表面外端上,马牙起动爪一端上配有拉簧,拉簧另一端固联在异面直线型内拐上,如此设计,实现了脚拐臂总成利用空芯定向限位牙轮总成作用,在定时定位张合过程中,力四边形外拐总成中的外拐始终处于水平纵横竖三维动态中的静态目的(实为力四边形外拐总成里的外拐前端自动地,绕内拐与外拐端头的绞结轴上撬)。
8.作为优化,中轴外端内侧上配装有大链轮,通过链条传动,去驱动自行车后轮胎中央配装的内变速器,如此设计,实现了不同路况下自动变速目的。
9.作为优化,水平脚踏板公转中自转操控外拐(可为力四边形传动或链条传动或齿轮传动或皮带传动或传动轴传动等机械传动)与内拐(可为异面直线型或链条导杆型等机械传动折叠式脚拐臂总成)自动张合,如此设计,实现了在施力区(上点),外拐与内拐垂直先张伸到力臂最长成一条直线(内拐外端水平向前),然后由力臂最长到外拐与内拐折叠成垂直(下点),在非施力区里外拐与内拐由垂直到折叠重合(内拐外端水平向后),再由重合到垂直,而外拐始终处于接近水平的动态中静态的目的。
10.采用上述技术方案,整个转动过程中,脚踏板始终处于受迫的水平状态,来操控力四边形外拐总成,使外拐自动边公转边前后移动,而始终处于三维中水平状态,,实现了在内拐外端“上点”到“水平向前”过程中,两拐(指内拐与外拐)由绞结垂直到绞结180度,在内拐外端“水平向前”到“下点”过程中,两拐由绞结180度到绞结垂直,在内拐外端“下点”到“水平向后”过程中,两拐由绞结垂直到绞结折叠重合(即零度),在内拐外端的“水平向后”到“上点”过程中,两拐由绞结的重合到绞结垂直的目的,显而易见,单人骑相当于多人同时
蹬。
11.动作原理:
12.附图说明:
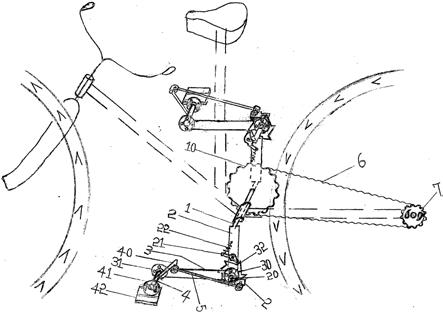
13.图1是本发明水平脚踏板操控四边形外拐与内拐自动定时张合自行车工作原理结构示意图。
具体实施方式
14.如图1所示是本发明水平脚踏板操控四边形外拐与内拐自动定时张合自行车中轴(1)两端固装有对称对置异面直线型内拐(2)异面直线型内拐(2)外端公垂线轴(20)套装在轴承(30)内孔里,轴承(30)固装在力四边形外拐总成的外拐(3)后端上,轴承(30)同时配装在空芯定向限位牙轮(32)中央内腔里,空芯定向限位牙轮(32)匹配的马牙起启爪(21)的转轴固装在内拐(2)上,马牙起动爪(21)未端配有拉簧(22),拉簧(22)另一端固装在内拐(2)上,踏板(42)工作面内侧中央固联在超越转轮(41)的转轮壳体上,超越转轮(41)的轮墩套装在脚踏板(42)的转轴(4)上,脚踏板(42)的转轴(4)内端,配装在外拐(3)前端上的轴承(31)内孔里,脚踏板(42)的转轴(4)中央垂直固联有拔杆(40)、拔杆(40)上端横向垂直小轴绞结着导杆(5)的前端,导杆(5)的后端绞结在异面直线型内拐(2)外端上,中轴(1)外端内侧上固联有大链轮(10),通过链条(6)传动,操控后轮胎中央配装的内变速器(7)。