1.本实用新型涉及防侧滑控制技术领域,具体地,涉及一种基于霍尔效应的电动车防侧滑控制系统。
背景技术:
2.霍尔效应在应用技术中特别重要。霍尔发现,如果对位于磁场(b)中的导体(d)施加一个电流(iv),该磁场的方向垂直于所施加电压的方向,那么则在既与磁场垂直又和所施加电流方向垂直的方向上会产生另一个电压(uh),人们将这个电压叫做霍尔电压,产生这种现象被称为霍尔效应。根据霍尔效应做成的霍尔器件,就是以磁场为工作媒体,将物体的运动参量转变为数字电压的形式输出,使之具备传感和开关的功能。
3.电动车辆在国民经济中所占份额不是很高。但是它符合国家定的节能环保趋势,大大方便了短途交通,最主要是通过对能源和环境的节省和保护在国民经济中起着重要的作用。但是,目前的电动车缺乏防侧滑的控制系统,导致遇到雨天路滑的情况,在刹车制动时经常发生侧滑,驾驶人员如果控制不好,可能导致人员受伤。因此,亟需发明一种基于霍尔效应的电动车防侧滑控制系统。
技术实现要素:
4.实用新型目的:本实用新型的目的是提供了一种基于霍尔效应的电动车防侧滑控制系统,具备控制车辆姿态防侧滑、检测控制精确等优点,解决了上述背景技术中提出的问题。
5.技术方案:为实现上述控制车辆姿态防侧滑、检测控制精确目的,本实用新型提供了一种基于霍尔效应的电动车防侧滑控制系统,包括电动车主控模块,所述电动车主控模块通过有线线路分别与轮速传感器、方向转角传感器、横摆角速度传感器、电机加速度传感器、制动控制单元、转向辅助控制单元及电机输出控制单元相互连接;
6.其中,所述的电动车主控模块还包括信号接收单元、信号处理单元及控制输出单元。
7.进一步的,所述的轮速传感器、方向转角传感器、横摆角速度传感器及电机加速度传感器分别连接于电动车主控模块内的信号接收单元;
8.所述制动控制单元、转向辅助控制单元及电机输出控制单元分别连接于电动车主控模块内的控制输出单元。
9.进一步的,所述信号接收单元、信息处理单元与输出控制单元通信通过有线线路相互连接。
10.进一步的,所述的轮速传感器采用霍尔式转速传感器。
11.进一步的,所述的轮速传感器是用于检测电动车车轮转速,检测电动车行驶速度;所述的方向转角传感器是用于检测电动车转向机构的转向角度;
12.所述的横摆角速度传感器是用于检测电动车横摆角速度;
13.所述的电机加速度传感器是用于检测电动车电机加速度;
14.所述的制动控制单元包括防抱死控制器,是用于电动车制动控制;
15.所述的转向辅助控制单元是用于调整电动车转向机构的转向角度;
16.所述的电机输出控制单元是用于控制电动车电机输出功率,控制电机加速度。
17.通过上述方案,电动车主控模块通过信号接收单元接收轮速传感器、方向转角传感器、横摆角速度传感器和电机加速度传感器实时检测信号,通过信息处理单元进行信号数据分析,通过控制输出单元向制动控制单元、转向辅助控制单元和电机输出控制单元输出控制信号,控制电动车的制动、转向和车速,实现电动车侧滑时控制车辆姿态,从而防止车辆倒地,造成安全事故以及人员受伤。
18.另外,通过上述方案,转速传感器的输出信号电压幅值不受转速的影响,频率响应高,抗电磁波干扰能力强,从而检测数值更加精确。
19.有益效果:本实用新型与现有技术相比,其显著优点是:1、该基于霍尔效应的电动车防侧滑控制系统,通过电动车主控模块连接轮速传感器、方向转角传感器、横摆角速度传感器、电机加速度传感器、制动控制单元、转向辅助控制单元和电机输出控制单元,轮速传感器、方向转角传感器、横摆角速度传感器和电机加速度传感器检测车辆行驶状态,检测分析到的数值达到侧滑临界值时,制动控制单元、转向辅助控制单元和电机输出控制单元启动,控制车辆状态,使得可以防止车辆侧滑,从而防止发生安全事故和人员受伤;2、该基于霍尔效应的电动车防侧滑控制系统,通过轮速传感器采用霍尔式转速传感器,使得检测抗干扰能力强,检测数值更加精确,从而通过制动控制单元对车速控制更加精准。
附图说明
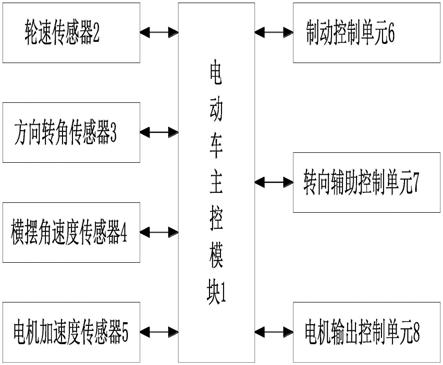
20.图1是本实用新型的结构示意图;
21.图2是本实用新型中电动车主控模块的结构示意图;
22.图中1是电动车主控模块,11是信号接收单元,12是信号处理单元,13是控制输出单元;
23.2是轮速传感器,3是方向转角传感器,4是横摆角速度传感器,5是电机加速度传感器,6是制动控制单元,7是转向辅助控制单元,8是电机输出控制单元相互连接。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.如图1-2所述,一种基于霍尔效应的电动车防侧滑控制系统,包括电动车主控模块1,电动车主控模块通过有线线路分别与轮速传感器2、方向转角传感器3、横摆角速度传感器4、电机加速度传感器5、制动控制单元6、转向辅助控制单元7和电机输出控制单元8相互连接,
26.其中,电动车主控模块1包括信号接收单元11、信号处理单元12和控制输出单元13;
27.轮速传感器2,用于检测电动车车轮转速,检测电动车行驶速度;
28.方向转角传感器3,用于检测电动车转向机构的转向角度;
29.横摆角速度传感器4,用于检测电动车横摆角速度;
30.电机加速度传感器5,用于检测电动车电机加速度;
31.制动控制单元6包括防抱死控制器,用于电动车制动控制;
32.转向辅助控制单元7,用于调整电动车转向机构的转向角度;
33.电机输出控制单元8,用于控制电动车电机输出功率,控制电机加速度。
34.进一步,轮速传感器2、方向转角传感器3、横摆角速度传感器4和电机加速度传感器5连接于电动车主控模块1内部的信号接收单元11;制动控制单元6、转向辅助控制单元7和电机输出控制单元8连接于电动车主控模块1内部的控制输出单元13,信号接收单元11、信息处理单元12和输出控制单元13通信连接,电动车主控模块1通过信号接收单元11接收轮速传感器2、方向转角传感器3、横摆角速度传感器4和电机加速度传感器5实时的检测信号;
35.通过信息处理单元12进行信号数据分析,通过控制输出单元13向制动控制单元6、转向辅助控制单元7和电机输出控制单元8输出控制信号,控制电动车的制动、转向和车速,实现电动车侧滑时控制车辆姿态,从而防止车辆倒地,造成安全事故以及人员受伤。
36.进一步,轮速传感器2采用霍尔式转速传感器,转速传感器2的输出信号电压幅值不受转速的影响,频率响应高,抗电磁波干扰能力强,从而检测数值更加精确。
37.在使用时,该基于霍尔效应的电动车防侧滑控制系统,通过轮速传感器2、方向转角传感器3、横摆角速度传感器4和电机加速度传感器5检测电动车行驶状态,检测分析到的数值达到侧滑临界值时,制动控制单元6、转向辅助控制单元7和电机输出控制单元8启动,控制车辆状态,使得可以防止车辆侧滑,从而防止发生安全事故和人员受伤。
38.以上所述本实用新型的技术方案,并非限制条件;虽有些进行详细说明,但该装置仍可以对技术方案进行修改或对部分进行修改和替换;而这些替换理论上不能脱离本实用新型的实质和技术方案范围。