1.本发明涉及汽车监控的技术领域,尤其涉及一种基于车载环视摄像头的移动设备端互联方法及系统。
背景技术:
2.随着生活水平的提高,汽车的普及率越来越高,汽车的驾驶体验,舒适度及安全性、智能驾驶辅助功能越来越受重视。汽车内的环视摄像头作为汽车全景影像的一个重要部件,以及是当前汽车的标配之一。目前,市面上的360环视全景系统均需要在汽车发动阶段才能使用,即均需要驾驶人在车上,点火打开导航屏,才可以在车内查看车周围的环境,当驾驶员离开车辆或离开驾驶位后,便无法对汽车的周边环境进行监控,其无法满足当前车主的远程汽车监控需求。
技术实现要素:
3.本发明为解决当前环视全景系统无法满足车主远程监控的技术问题,提供一种基于车载环视摄像头的移动设备端互联方法及系统。
4.为解决上述技术问题,本发明的技术方案如下:
5.一种应用于所述基于车载环视摄像头的移动设备端互联系统,所述系统包括车端处理器,所述方法包括:
6.车载处理器通过云端服务器与移动设备端建立联系;
7.汽车熄火状态下,在车内传感器感应到车身异常状态、预设泊车程序中或在移动设备端请求时,唤醒车载环视摄像头;
8.接收车载环视摄像头所采集的图像信息或视频信息,处理后发送至云端服务器,通过云端服务器进行存储或转发给移动设备端。
9.进一步的,所述移动设备端上设置有环视图像拼接功能。
10.进一步的,所述移动设备端包括手机、智能手表和平板电脑。
11.进一步的,所述移动设备端通过app程序调用云端服务器中的图像信息或视频信息,通过解压处理后,利用环视图像拼接功能进行图像拼接处理后显示。
12.进一步的,所述移动设备端通过云端服务器向车端处理器请求唤醒车载环视摄像头,并在通过云端服务器获取数据后,在移动设备端进行视角调整,实时观测车辆周边环境。
13.进一步的,所述车载处理器通过车端内的网络或wifi模块和云端服务器信号连接,并通过rtp协议将图像、视频数据传输至云端服务器。
14.进一步的,所述车身异常状况包括有车身碰撞振动、破窗、车门异常开启;所述预设泊车程序包括avp代客泊车功能。
15.进一步的,所述车载环视摄像头所采集的图像信息或视频信息为360环视图像或视频,车载处理器对图像信息或视频信息进行压缩处理,并发送至云端服务器。
16.本发明还提供一种基于车载环视摄像头的移动设备端互联系统,所述系统包括车端处理器、车载环视摄像头、云端服务器和移动设备端;所述车端处理器和车载环视摄像头控制连接,所述车端处理器和云端服务器通讯连接,所述移动设备端通过云端服务器接收所述车端处理器上传的图像或视频数据;所述系统通过车端处理器,执行上述的基于车载环视摄像头的移动设备端互联方法。
17.进一步的,还包括电源模块,所述电源模块和车端处理器控制连接,所述电源模块根据车端处理器指令,在汽车熄火状态下为车载环视摄像头供电。
18.本发明通过车机端和移动设备端进行互联,远程对车机端内的环视摄像头进行调用,得以远程查看汽车周边的环境,满足了驾驶员在离车阶段时对汽车的监控需求,该方法可靠实用,增加了汽车环视摄像头的功能性,提高了驾驶员的使用体验。
附图说明
19.图1为本发明实施例中基于车载环视摄像头的移动设备端互联方法的结构流程图。
具体实施方式
20.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
21.本技术实施例的附图中相同或相似的标号对应相同或相似的部件;在本技术的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制。
22.此外,若有“第一”、“第二”等术语仅用于描述目的,主要是用于区分不同的装置、元件或组成部分(具体的种类和构造可能相同也可能不同),并非用于表明或暗示所指示装置、元件或组成部分的相对重要性和数量,而不能理解为指示或者暗示相对重要性。
23.图1示出了本发明实施例中基于车载环视摄像头的移动设备端互联方法的结构流程图。
24.如图1所示,本实施例提供了一种基于车载环视摄像头的移动设备端互联方法,该方法应用于所述基于车载环视摄像头的移动设备端互联系统,主要用于实现车载环视摄像头在汽车熄火状态下的视频监控,并通过云端服务器来进行保存或在移动设备端上的查看。
25.其中,该系统包括有车端处理器,车端处理器用于实现车载环视摄像头在汽车熄火状态下的唤醒,在车载环视摄像头运作时,接收其采集的图像数据并对数据进行处理后,上传至云端服务器。优选的,该系统还包括有云端服务器和移动设备端,其中云端服务器用于和车端处理器,即车机端进行通讯连接,其中,通讯连接是指连接的两者可以通过网络数据通讯的方式进行数据、信号传输。移动设备端指的是移动设备,包括常见的手机、智能手表和平板电脑等可以通过内部芯片或处理单元、可以进行远程控制的智能移动设备。
26.本实施例中的基于车载环视摄像头的移动设备端互联方法应用于上述中的系统,并利用上述系统中的车端处理器执行以下步骤:
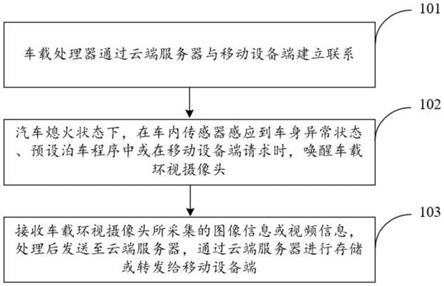
27.101、车载处理器通过云端服务器与移动设备端建立联系;
28.102、汽车熄火状态下,在车内传感器感应到车身异常状态、预设泊车程序中或在移动设备端请求时,唤醒车载环视摄像头;
29.103、接收车载环视摄像头所采集的图像信息或视频信息,处理后发送至云端服务器,通过云端服务器进行存储或转发给移动设备端。
30.其中,在上述步骤101中,车载处理器通过车载导航的tbox模组内的4g或者wifi模块运用rtp协议将视频信息传输到云端服务器。云端服务器为视频流服务器,其部署在云端,用户可以方便的进行远程维护,免费重装系统,硬件级别上实现云主机之间的完全隔离;其内置冗余的共享存储和智能备份,物理服务器失败可在几分钟内自动恢复;而服务环境采用高端服务器进行部署,同时采用集中的管理与监控,确保业务稳定可靠。
31.在上述步骤102中,汽车熄火状态是指汽车处于发动机关闭状态,或者驾驶员不在车内的场景。车端处理器通过汽车内部的车内传感器来感应车身是否存在异常,车身异常状况包括有车身碰撞振动、破窗、车门异常开启等,例如,当车辆有可疑人员开门或者破窗,车内传感器就会通知车端处理器,控制电源模块给摄像头供电,唤醒车载环视摄像头,以录制周围场景的图像或视频信息。
32.当然,摄像头也可以在智能泊车,例如avp代客泊车功能中被唤醒,以保存场景图像采集,协助代客泊车功能得以进行。摄像头的唤醒也包括用户主动远程唤醒,用户在移动设备端利用云端服务器和车端处理器进行互联,发送请求信号唤醒摄像头。同时,用户在移动设备端通过云端服务器获取数据后,在移动设备端进行视角调整,实时观测车辆周边环境。
33.在上述步骤103中,车端处理器在向云端服务器发送数据前,先对环视摄像头采集到的图像视频数据进行处理,压缩后在进行上传,具体的,该车载环视摄像头所采集的图像信息或视频信息为360环视图像或视频,车载处理器对图像信息或视频信息进行压缩处理,并发送至云端服务器,此处车载处理器并不对摄像头的图像视频信息进行拼接处理,而是直接压缩后发送至云端服务器,通过移动设备端来进行拼接操作,从而减低车端处理器的数据处理难度,降低其在汽车熄火状态下的电量消耗,保证其上传速度。
34.进一步的,在本实施例中,移动设备端上设置有环视图像拼接功能,其通过所搭载的app程序中调用云端服务器中的图像信息或视频信息,通过解压处理后,利用环视图像拼接功能进行图像拼接处理后显示以及操作处理。在具体应用时,用户可以直接通过移动设备端以云端服务器为中转,向车端处理器请求唤醒车载环视摄像头,并在通过云端服务器获取数据后,在移动设备端进行视角调整,实时观测车辆周边环境。
35.为了更好的操作体验,本实施例提供以下两种应用场景。
36.在场景一中:
37.1)搭载360环视摄像头的车辆没有司机和乘客,停靠在路面上或者底下车库;
38.2)当有可疑人员开门或者破窗的时候,车内传感器通知车载导航的电源模块给摄像头供电,摄像头开始录制周围场景信息;
39.3)视频通过h.264的格式进行压缩编码,通过车机端的tbox模组的4g模块以rtp协
议发送到云端;
40.4)云端服务器将数据实时转发给手机端,或者根据用户需求进行存储到存储服务器;
41.5)手机上的预警app弹出消息通知用户是否需要打开app查看车辆周围情况。内置360环视算法接收摄像头数据开始拼接算法;
42.6)用户打开app,这时app的内置360环视算法开始接收摄像头数据,并且开始拼接成车辆周围360度的图像;
43.7)用户可以通过触摸旋转调整视角,实时观测车辆周围的环境,进行预警。
44.在场景二中:
45.1)搭载360环视摄像头的车辆没有司机和乘客,并进入代客泊车场所时,用户开启avp(代客泊车)功能;
46.2)用户通过手机app主动通知车载摄像头开始采集车辆周围数据;
47.3)视频通过h.264的格式进行压缩编码,通过车机端的tbox模组的4g模块以rtp协议发送到云端;
48.4)云端服务器将数据实时转发给手机端,或者根据用户需求进行存储到存储服务器;
49.5)手机上的预警app弹出消息通知用户是否需要打开app查看车辆周围情况。内置360环视算法接收摄像头数据开始拼接算法;
50.6)用户打开app,这时app的内置360环视算法开始接收摄像头数据,并且开始拼接成车辆周围360度的图像;
51.7)用户可以通过触摸旋转调整视角,实时观测车辆周围的环境,当avp算法有异常的时候及时终止avp(代客泊车)功能。
52.本实施例通过车机端和移动设备端进行互联,远程对车机端内的环视摄像头进行调用,得以远程查看汽车周边的环境,满足了驾驶员在离车阶段时对汽车的监控需求,该方法可靠实用,增加了汽车环视摄像头的功能性,提高了驾驶员的使用体验。
53.另外的,本实施例一种基于车载环视摄像头的移动设备端互联系统,该系统包括车端处理器、车载环视摄像头、云端服务器和移动设备端,其中,车端处理器和车载环视摄像头控制连接,而车端处理器和云端服务器通讯连接,移动设备端则通过云端服务器来接收车端处理器上传的图像或视频数据。
54.具体的,本系统能够通过车端处理器,来执行本实施例上述的基于车载环视摄像头的移动设备端互联方法,从而满足了驾驶员在离车阶段时对汽车的监控需求,以及遥控泊车或者代客泊车时车辆周围安全情况的监控需求。
55.另外,本系统还包括电源模块,其主要用于为车载处理器和环视摄像头供电,具体的,电源模块和车端处理器控制连接,使用时,电源模块能够根据车端处理器指令,在汽车熄火状态下为车载环视摄像头开启供电。
56.显然,本发明的上述实施例仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的
保护范围之内。