1.本发明涉及一种船舶海工领域,具体来说涉及一种柴油机直流组网电力推进系统航行模式切换方法。
背景技术:
2.传统柴油机推进船舶,作为动力源的柴油机直接与推进螺旋桨连接,此时当船舶面临突发情况时,如需要突然低速或行驶或者靠港减速时,柴油机难以迅速转速度,对柴油机的正常运转有较大的危害。后来发展的柴油机直流组网推进船舶能够较好的解决上述问题,但是由于需要多台柴油机为船舶推进系统提供动力,在面临不同航行情况时,难以控制柴油机的燃油经济性,不仅造成了大量的浪费,还排除了大量有害气体,污染大气环境。在专利 cn201621326228.0中提出了并联多个柴油机组根据负载组合柴油机组的方案来提高柴油机的运行效率,但是并没有对柴油机推进船舶的面临的不同航行工况与柴油机的具体控制方法给出解决方案,同时对船舶运行过程中的具体参数变化以及柴油机组合的判定方法均未提及,难以解决柴油机推进船舶航行时面临的实际困难。
技术实现要素:
3.本发明所要解决的技术问题是:提供一种柴油机直流组网电力推进系统的航速模式切换方法。
4.为解决上述技术问题,本发明所采用的技术方案为:
5.一种柴油机直流组网电力推进系统的航速模式切换方法,其中柴油机直流组网电力推进系统包括额定功率大小相同的四组柴油发电机组,其中第一柴油发电机组、第二柴油发电机组和第三柴油发电机组为主发电机组,第四柴油发电机组为备用发电机组;第一柴油发电机组的电能输出端通过电缆依次连接第一断路器、第一整流器、第一熔断器,最后接至直流母线上;
6.第二柴油发电机组的电能输出端通过电缆依次连接第二断路器、第二整流器、第二熔断器,最后接至直流母线上;第三柴油发电机组的电能输出端通过电缆依次连接第三断路器、第三整流器、第三熔断器,最后接至直流母线上;第四柴油发电机组的电能输出端通过电缆依次连接第四断路器、第四整流器、第四熔断器,最后接至直流母线上;
7.直流母线通过依次连接第五熔断器、第五逆变器和第五断路器的电缆与左推进电机相连接;直流母线通过依次连接第六熔断器、第六逆变器、第六断路器和第六日用变压器的电缆与日用负载相连;直流母线通过依次连接第七熔断器、第七逆变器、第七断路器和第七日用变压器的电缆与日用负载相连;直流母线通过依次连接第八熔断器、第八逆变器和第八断路器的电缆与右推进电机相连接;
8.该柴油机直流组网电力推进系统的航速模式切换方法如下:
9.步骤1,设定航速模式;依据船舶左推进电机和右推进电机的驱动速度,将船舶的经济航行模式设定为低速、中速和高速三种工况,且船舶在未进行模式切换时,默认设定为
以经济模式二航行,三种工况的具体定义如下:
10.(1)低速航行,此时第一柴油发电机组和第二柴油发电机组处于低速作业模式;
11.(2)中速航行,此时第一柴油发电机组和第三柴油发电机组处于高速作业模式;
12.(3)高速航行模式,此时第一柴油发电机组、第二柴油发电机组和第三柴油发电机组处于高速作业模式;
13.步骤2,输入初始参数;根据每次航行的预先规划,将此次航行的总里程s、航行的规划时间t、以及柴油发电机组在低速运行的额定功率p
l
和高速额定功率ph输入中央控制系统,作为控制此次航行航速模式的基础参数;
14.步骤3,读取船舶实时航行参数;当船舶在航行时,每隔设定时间读取一次当前船舶航行的动态参数,具体包括:
15.(1)船舶航行航线的已航行里程数,记为l;
16.(2)船舶航行目前已经航行的时间,记为t;
17.(3)船舶航行当前的实时航速,记为v;
18.(4)船舶航行时的日用电功率,记为pc;
19.其中pc=u
1*
i1pf1+u
2*
i2pf2,u1和u2分别为柴油机直流组网电力推进系统的第六逆变器和第七逆变器在日用负载侧的电压,单位v;i1和i2分别为第六逆变器和第七逆变器在日用负载侧的电流,单位a,pf1和pf2分别为第六逆变器和第七逆变器所在支路系统的功率因素;
20.步骤4,计算推进电机功率;在三种航行模式下单个推进电机所承担的功率为:
21.(1)低速航行:p
m1
=(0.85
×2×
p
l-pc)/2
22.(2)中速航行:p
m2
=(0.85
×2×
p
h-pc)/2
23.(3)高速航行:p
m3
=(0.85
×3×
p
h-pc)/2
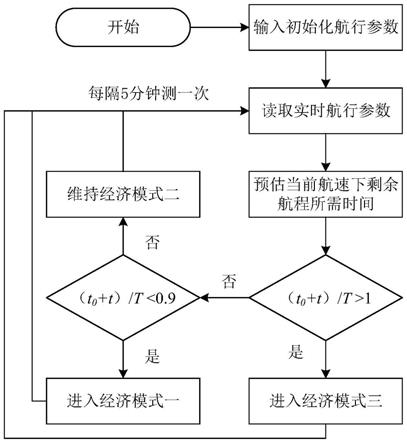
24.步骤5,切换航行模式;船舶在未进行模式切换时,默认以经济模式二航行,中央控制系统每个设定时间段读取一次当前的航行参数,根据当前的航行参数不断对船舶的航行模式进行切换,保证船舶能够按照预定的规划时间t到达目的地;其具体如下:
25.中央控制系统根据当前航行速度,计算当前到达目的地的预估航行时间,记为t0;计算(t0+t)/t的数值;若(t0+t)/t》1,则执行高速航行模式;若(t0+t) /t《0.9,则执行低速航行模式;若0.9≤(t0+t)/t≤1,则执行中速航行模式。
26.作为一种优选的方案,所述高速航行模式操作包括:中央控制系统向第一柴油发电机组、第二柴油发电机组和第三柴油发电机组支路上的第一整流器、第二整流器和第三整流器发出指令,启动三组柴油发电机组并使其工作在高速模式下;同时,调整船舶的左推进电机和右推进电机的所在支路的第五逆变器和第八逆变器,提高其输出电流,使得左推进电机和右推进电机的输出功率为 p
m3
;
27.作为一种优选的方案,所述低速航行模式操作包括:中央控制系统向第一柴油发电机组、第二柴油发电机组上的第一整流器和第二整流器发出指令,使其工作在低速模式下,并停止其他柴油发电机组的作业;同时,调整船舶的左推进电机和右推进电机的所在支路的第五逆变器和第八逆变器,降低其输出电流,使得左推进电机和右推进电机的输出功率为p
m1
;
28.作为一种优选的方案,所述中速航行模式操作包括:若船舶此时正以中速航行运
行,则保持当前状态;若船舶此时正以高速航行或低速航行运行,则中央控制系统向第一柴油发电机组、第二柴油发电机组支路上的第一整流器和第二整流器发出指令,使其工作在高速模式下,并停止其他柴油发电机组的作业;同时,调整船舶的左推进电机和右推进电机的所在支路的第五逆变器和第八逆变器,改变其输出电流,使得左推进电机和右推进电机的输出功率为p
m2
。
29.本发明的有益效果是:
30.1、通过调控船舶推进电机的功率,使得船舶不论在低速、中速还是高速航行时,都能够保证此时船舶的总负载约为船舶柴油发电机组总功率的85%左右,保证了船舶在航行全过程中一直处于油耗最经济的状态,极大程度的降低了能源的消耗。
31.2、通过对船舶到港时间的规划与实时预测,切换当前船舶不同的航行模式,获得船舶航行航速的最优与最经济的调节方法,保证了船舶可以按时到港,提高了船舶航行的效率。
附图说明
32.图1是本发明柴油机直流组网电力推进系统的结构示意图;
33.图2是本发明航速模式切换方法流程示意图;
34.图中:1-中央控制系统,2-直流母线,11-第一柴油发电机组,12第一断路器,13-第一整流器,14-第一熔断器,21-第二柴油发电机组,22第二断路器,23-第二整流器,24-第二熔断器,31-第三柴油发电机组,32第三断路器,33-第三整流器,34-第三熔断器,41-第四柴油发电机组,42第四断路器,43-第四整流器,44-第四熔断器,51-第五熔断器,52-第五逆变器,53-第五断路器,54
‑ꢀ
左推进电机,61-第六熔断器,62-第六逆变器,63-第六断路器,64-第六日用变压器,71-第七熔断器,72-第七逆变器,73-第七断路器,74-第七日用变压器, 81-第八熔断器,82-第八逆变器,83-第八断路器,84-右推进电机。
具体实施方式
35.下面结合附图,详细描述本发明的具体实施方案;
36.如图1所示,一种柴油机直流组网电力推进系统的航速模式切换方法,其中柴油机直流组网电力推进系统包括额定功率大小相同的四组柴油发电机组,其中第一柴油发电机组11、第二柴油发电机组21和第三柴油发电机组31为主发电机组,第四柴油发电机组41为备用发电机组;第一柴油发电机组11的电能输出端通过电缆依次连接第一断路器12、第一整流器13、第一熔断器14,最后接至直流母线2上;
37.第二柴油发电机组21的电能输出端通过电缆依次连接第二断路器22、第二整流器23、第二熔断器24,最后接至直流母线2上;第三柴油发电机组31的电能输出端通过电缆依次连接第三断路器32、第三整流器33、第三熔断器34,最后接至直流母线2上;第四柴油发电机组41的电能输出端通过电缆依次连接第四断路器42、第四整流器43、第四熔断器44,最后接至直流母线2上;
38.直流母线2通过依次连接第五熔断器51、第五逆变器52和第五断路器53 的电缆与左推进电机54相连接;直流母线2通过依次连接第六熔断器61、第六逆变器62、第六断路器63和第六日用变压器64的电缆与日用负载相连;直流母线2通过依次连接第七熔断器71、第
七逆变器72、第七断路器73和第七日用变压器74的电缆与日用负载相连;直流母线2通过依次连接第八熔断器81、第八逆变器82和第八断路器83的电缆与右推进电机84相连接;
39.如图2所示,该柴油机直流组网电力推进系统的航速模式切换方法如下:
40.步骤1,设定航速模式;依据船舶左推进电机54和右推进电机的驱动速度,将船舶的经济航行模式设定为低速、中速和高速三种工况,且船舶在未进行模式切换时,默认设定为以经济模式二航行,三种工况的具体定义如下:
41.(1)低速航行,此时第一柴油发电机组11和第二柴油发电机组21处于低速作业模式;转速为0.8n,n是高速时的额度转速、输出功率为0.5p,总输出功率为p;
42.(2)中速航行,此时第一柴油发电机组11和第三柴油发电机组31处于高速作业模式;转速为n,n是高速时的额度转速、输出功率为p,总输出功率为 2p;
43.(3)高速航行模式,此时第一柴油发电机组11、第二柴油发电机组21和第三柴油发电机组31处于高速作业模式;转速为n,n是高速时的额度转速、输出功率为p,总输出功率为3p;
44.步骤2,输入初始参数;根据每次航行的预先规划,将此次航行的总里程s、航行的规划时间t、以及柴油发电机组在低速运行的额定功率p
l
和高速额定功率ph输入中央控制系统1,作为控制此次航行航速模式的基础参数;
45.船舶柴油发电机组为异步发电机,可通过各个发电机组所在支路的整流器控制其发电功率,p
l
=0.5p为柴油发电机组在低速转动时的额定功率,ph=p为柴油发电机组在高转速时的额定功率。
46.步骤3,读取船舶实时航行参数;当船舶在航行时,每隔设定时间(5分钟) 读取一次当前船舶航行的动态参数,具体包括:
47.(1)船舶航行航线的已航行里程数,记为l;
48.(2)船舶航行目前已经航行的时间,记为t;
49.(3)船舶航行当前的实时航速,记为v;
50.(4)船舶航行时的日用电功率,记为pc;
51.其中pc=u
1*
i1pf1+u
2*
i2pf2,u1和u2分别为柴油机直流组网电力推进系统的第六逆变器62和第七逆变器72在日用负载侧的电压,单位v;i1和i2分别为第六逆变器62和第七逆变器72在日用负载侧的电流,单位a,pf1和pf2分别为第六逆变器62和第七逆变器72所在支路系统的功率因素;
52.步骤4,计算推进电机功率;在三种航行模式下单个推进电机所承担的功率为:
53.(1)低速航行:p
m1
=(0.85
×2×
p
l-pc)/2
54.(2)中速航行:p
m2
=(0.85
×2×
p
h-pc)/2
55.(3)高速航行:p
m3
=(0.85
×3×
p
h-pc)/2
56.步骤5,切换航行模式;船舶在未进行模式切换时,默认以经济模式二航行,中央控制系统每个设定时间段读取一次当前的航行参数,根据当前的航行参数不断对船舶的航行模式进行切换,保证船舶能够按照预定的规划时间t到达目的地;其具体如下:
57.中央控制系统根据当前航行速度,计算当前到达目的地的预估航行时间,记为t0;计算(t0+t)/t的数值;若(t0+t)/t》1,则执行高速航行模式;若(t0+t) /t《0.9,则执行低速航行模式;若0.9≤(t0+t)/t≤1,则执行中速航行模式。
58.所述高速航行模式操作包括:中央控制系统向第一柴油发电机组、第二柴油发电机组和第三柴油发电机组支路上的第一整流器、第二整流器和第三整流器发出指令,启动三组柴油发电机组并使其工作在高速模式下;同时,调整船舶的左推进电机和右推进电机的所在支路的第五逆变器和第八逆变器,提高其输出电流,使得左推进电机和右推进电机的输出功率为p
m3
;
59.所述低速航行模式操作包括:中央控制系统向第一柴油发电机组、第二柴油发电机组上的第一整流器和第二整流器发出指令,使其工作在低速模式下,并停止其他柴油发电机组的作业;同时,调整船舶的左推进电机和右推进电机的所在支路的第五逆变器和第八逆变器,降低其输出电流,使得左推进电机和右推进电机的输出功率为p
m1
;
60.所述中速航行模式操作包括:若船舶此时正以中速航行运行,则保持当前状态;若船舶此时正以高速航行或低速航行运行,则中央控制系统向第一柴油发电机组、第二柴油发电机组支路上的第一整流器和第二整流器发出指令,使其工作在高速模式下,并停止其他柴油发电机组的作业;同时,调整船舶的左推进电机和右推进电机的所在支路的第五逆变器和第八逆变器,改变其输出电流,使得左推进电机和右推进电机的输出功率为p
m2
。
61.上述的实施例仅例示性说明本发明创造的原理及其功效,以及部分运用的实施例,而非用于限制本发明;应当指出,对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。