基于自主遥控水下航行器arv的可隔离便携充放电装置
技术领域
1.本发明属于可隔离便携充放电装置,涉及一种基于自主遥控水下航行器arv的可隔离便携充放电装置,涉及的是一种基于arv(autonomous remote vehicle)的可隔离便携充放电装置,涉及机械、电气、控制等领域。
背景技术:
2.随着机器人技术的发展与人类对海洋的不断深入探索,水下航行器的应用越来越普及。而航行器的供电系统无疑是要首要解决的问题,特别是针对某些需要携带大功率用电设备的场合,一个可靠且稳定的供电系统就显得尤为重要。
3.传统的供电方式是岸上的供电系统通过一根很长的电缆,通常与光纤组合在一起进行岸上与水下航行器的电力传送与数据传递。这种方法有明显的不足:水下航行器的下潜深度受限,想要下潜的更深就要加长电缆,导致电力在线缆上的消耗严重,且质量大幅增加,使岸上的操控人员对航行器的操控难度加大;电缆一但断裂航行就将因失去动力源而无法自保,进而被水浪随意冲击毁坏甚至丢失,造成巨大的损失;电缆传输是通过交变电流传输到航行器体内,再完成交直流转换,这样会对某些对电磁环境要求严格的设备如军用设备产生交调干扰,从而无法使用。
技术实现要素:
4.要解决的技术问题
5.为了避免现有技术的不足之处,本发明提出一种基于自主遥控水下航行器arv的可隔离便携充放电装置。
6.本发明的第一目的是提供一种携带动力源的,无需岸基供电的水下航行器结构,并可与主控板控制系统的电气系统进行隔离的装置。该装置有足够大的空间用以存放充足数量和容量的电池组;在航行器运行时可为推进器及其它大功率用电设备提供充足、可靠、无交调干扰的动力源;且在系统运行时可以利用小电流的控制信号达到控制较强电流的通断的目的;且其高电压可以控制板所需低电压进行隔离,起到保护电路板的作用。
7.本发明的第二目的是实现便携的充放电。由于航行器携带了设备运行所需的全部动力源,故航行器的质量与体积均会大幅增加,这就对推进器的功率提出了更高的要求,进一步的就加剧了电池电量的消耗,所以一个便携的充电系统就显得尤为重要。
8.技术方案
9.一种基于自主遥控水下航行器arv的可隔离便携充放电装置,其特征在于:将arv仪表舱4和arv的电池舱1置于两个密闭的舱体中,上下布局固定在同一框架上,两个舱体之间通过水密接头和缆线连接;在arv仪表舱4内电源的输入端口设有继电器k3,由隔离与开关电路控制继电器的导通,继电器的触点控制电源的通断;所述arv仪表舱4上设有多个仪表舱上与电池舱放电接口连接的接口3;所述电池舱1上设有多个电池舱充放电接口2;所述电池舱1内的多个电池,根据设备所需电压与功率将相同电压与容量的单个电池进行串并
联获得满足条件的不同电池组,以单独的电池舱充放电接口2布局于arv的电池舱1的端口;相应的在arv仪表舱4上的仪表舱上与电池舱放电接口连接的接口3以所需电压与功率与电池舱充放电接口2一一对应。
10.所述隔离与开关电路包括光耦隔离芯片和mos管;主控芯片发出的pwm信号通过电阻r1连接光耦隔离芯片的输入端口3,光耦隔离芯片输出6端口通过电阻r12连接mos管输入端,mos管导通后通过二极管v5输出48v,控制继电器k3的关断与闭合;电容c123、c1、r21和r17为偏置电路。
11.所述光耦隔离芯片采用hcpl-0314。
12.所述mos管采用irf4310。
13.有益效果
14.本发明提出的一种基于自主遥控水下航行器arv的可隔离便携充放电装置,将arv仪表舱和arv的电池舱置于两个密闭的舱体中,两个舱体之间通过水密接头和缆线连接;由隔离与开关电路控制继电器的导通,继电器的触点控制电源的通断;根据设备所需电压与功率将相同电压与容量的单个电池进行串并联获得满足条件的不同电池组,以单独的电池舱充放电接口布局于arv的电池舱的端口;相应的在arv仪表舱上的仪表舱上与电池舱放电接口连接的接口以所需电压与功率与电池舱充放电接口一一对应。
15.本发明与现有技术相比,主要具备以下的技术优点如下:
16.1.将arv的供电系统放置在航行器本体上,减小了电力在线缆传输上的损耗,减轻了线缆的质量,降低了布放,回收,以及操控的难度。
17.2.由于arv自主携带电力系统,故可以在控制芯片中添加自主航行的程序,可以大大提升航行器在位机时刻的保命能力。
18.3.通过对锂电池进行串并联组合的方式可以根据设备所需自主设计电池的电压、容量以及空间排布。
19.4、通过将各组电池并联并引到电池舱水密接头进行充电的方式,大大减小了所需水密接头与电缆的数量,降低了成本,并使得不打开舱体进行充电成为现实,大大简化了充电的操作。
附图说明
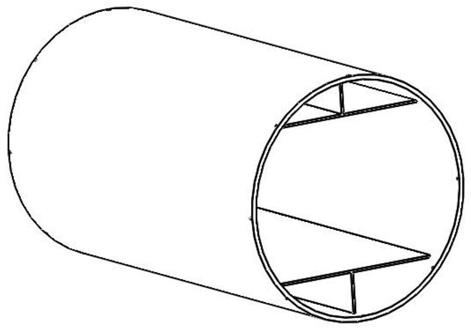
20.图1为电池舱结构示意图;
21.图2为电池舱内架示意图;
22.图3为电池舱与仪表舱电缆连接示意图;
23.图4为实施例控制板上隔离与开关电路;
24.图5为arv装配体示意图;
25.图6为实施例各组电池并联充电接线示意图
具体实施方式
26.现结合实施例、附图对本发明作进一步描述:
27.图1、图2分别为电池舱结构和内架示意图。它们示出,本发明的一种具体实施方式为,将动力电池与其他部件如控制板、传感器等分开放置在两个密闭的舱体中,分别为电池
舱和仪表舱,两个舱体之间通过水密接头和缆线连接,如图3所示。仪表舱中只留一块供控制板工作的小电压小功率电池。电池舱中设计滑槽、挡板等装置用于对电池进行固定与分组。仪表舱的外形结构与电池舱相似,只是大小与内部结构有所不同,arv的整体装配示意图如图5所示。
28.系统主控板固定于仪表舱内,其控制电源通断部分原理如图4所示。仪表中放置接触器用于控制电池舱中电池的接通与关断。同时在电路板上设计光耦隔离与开关管电路,来达到隔离大电压,保护电路板,同时还可以通过控制板上的信号来控制接触器的通断,从而到达小电流控制大电流的目的。
29.本发明的另一目的是电池组及其充电功能的设计,见图6的电池串并联结构,j1、j2和j3输出不同的电压和功率组合:
30.其实现步骤为:
31.步骤1.针对设备工作所需的电压与功率等要求,选用锂离子电池进行串并联组合来达到所需电压与容量要求,串联提高电压,并联提高容量,但要注意各串并联电池的电压、容量等参数均要相同;
32.步骤2.考虑到电池数量有可能很多,故采用各组并联同时充电的方式,将各组电池进行并联,各并联的各电池组电压与容量也要相同,不相同的要单独接出来;
33.步骤3.如图6所示为各组电池并联充电接线示意图。由于各组电池可能是由多块电池串联起来的,充电时由于各电池的不一致性,所充得电量会不尽相同,甚至造成过充。所以还需要实时监测各块电池的当前电压,以及时将各各串联电池的电压进行微调,使之达到平衡状态,将各组各路中用于测量单个电池电压的线都单独引出来,每路串联路上的并作一组称为一个平衡头;
34.步骤4.确定好要引出充电线的组数后配备相应数目的水密插头与堵头,其中一部分是各组电池的正负极经并联之后接至电池舱的水密座上,在航行器正常工作时这部分接头通过水密缆给仪表舱供电,给整个arv系统提供动力源;另一部分是各组中各块电池引出的平衡头线接到电池舱的水密插座上,这部分插座在航行器工作时要用对应堵头堵上起到密封作用;
35.步骤5.在航行器运行一段时间后要进行充电时,将于仪表舱相连的电缆换成相应的充电头插在充电器的对应接口;将一路平衡头插座上的堵头拔下换作相应的充电连接线连接在充电器的对应接口。注意充电时要使用具有平衡充功能的充电器进行连接;
36.步骤6.待充电器上显示电量即将充满之时,换上该组电池中另一路平衡头,进行该路电池上各串联电池电量的微调,使之处于平衡状态;接着再换上另一路的平衡头进行微调,直到该电池组中所有电池电量均达到平衡状态;
37.步骤7.换另一组电池组重复步骤6,直到所有电池组中电池均达到平衡状态,充电完成后将连接各组并联线的插座重新用水密缆与仪表舱连接,与各路平衡头线的插座继续用堵头进行密封,等待arv的下一次运行。