1.本实用新型涉及水下机器人技术领域,特别涉及一种用于仿生机器鱼的浮沉装置及仿生机器鱼。
背景技术:
2.仿生机器鱼,作为一种典型的水下移动机器人,应用的领域非常广泛。在科普教育方面,仿生机器鱼已成功运用到鱼类游动机理和水下仿生机器人的科普展示中。在水质监测方面,仿生机器鱼作为水下移动平台,能够搭载各种水质传感器,监测包括叶绿素、含氧量、ph值、电导率等参数在内的各种水质参数。在军事应用方面,仿生机器鱼有望通过搭载一些军用传感器,利用其机动、灵活的游动特点,完成军事侦察、反潜、排雷、布雷等特殊任务,且其隐蔽性较好。在水产养殖方面,由于其仿生的特点,在水下进行检测作业时不会对水产生物造成惊扰。
3.但是,目前的仿生机器鱼在需要上浮时,是依靠其仿生鱼鳍的摆动来实现上浮运动。且目前的一些水下潜器如潜水艇等,都是依靠吸、排水的原理实现下沉、上浮的运动。而在自然界中大部分鱼的浮沉运动则是依靠通过鱼鳔来实现,鱼鳔是鱼身体比重的调节器官,当鱼鳔体积变大,鱼身体的体积也随之增大,导致其受到的浮力变大,此时鱼可以完成上浮运动;当鱼鳔体积变小,鱼身体的体积也随之变小,导致其受到的浮力变小,此时鱼可以完成下沉运动。因此,目前的仿生机器鱼在进行浮沉运动时,其仿生效果较差;且依靠电机驱动仿生鱼鳍实现上浮或通过泵的吸、排水实现浮沉运动的方法,其能耗高、噪声大、隐蔽性差,并且对仿生机器鱼结构的紧凑性造成了一定的影响,导致其机身笨重。
4.因而现有技术还有待改进和提高。
技术实现要素:
5.鉴于上述现有技术的不足之处,本实用新型的目的在于提供一种用于仿生机器鱼的浮沉装置及仿生机器鱼,旨在解决现有技术中的仿生机器鱼在进行浮沉运动时仿生性能差的问题。
6.为了达到上述目的,本实用新型采取了以下技术方案:
7.本实用新型实施例提供了一种用于仿生机器鱼的浮沉装置,其中,包括:
8.基板和浮沉部件;所述浮沉部件对称设置在所述基板的两侧面;
9.所述浮沉部件包括:介电弹性体薄膜层、电极层、导电组件以及弹性组件;
10.所述介电弹性体薄膜层设置在所述基板上,所述介电弹性体薄膜层与所述基板之间形成弧形状的第一空腔;所述电极层包裹设置在所述介电弹性体薄膜层上;
11.所述导电组件与所述电极层电连接;所述弹性组件一端设置在所述基板上、另一端连接于所述介电弹性体薄膜层。
12.进一步地,所述用于仿生机器鱼的浮沉装置中,所述浮沉部件还包括橡胶薄膜层;所述橡胶薄膜层设置在所述介电弹性体薄膜层上,所述橡胶薄膜层与所述介电弹性体薄膜
层之间形成弧形状的第二空腔。
13.进一步地,所述用于仿生机器鱼的浮沉装置中,所述电极层包括:第一电极和第二电极;所述第一电极设置在所述介电弹性体薄膜层远离所述基板的一侧,所述第二电极设置在所述介电弹性体薄膜层靠近所述基板的一侧。
14.进一步地,所述用于仿生机器鱼的浮沉装置中,所述导电组件包括:第一导电条和第二导电条;所述第一导电条与所述第一电极连接,所述第二导电条与所述第二电极连接。
15.进一步地,所述用于仿生机器鱼的浮沉装置中,所述第一电极和所述介电弹性体薄膜层内开设有第一绝缘通道,所述第二导电条穿过所述第一绝缘通道与所述第二电极连接。
16.进一步地,所述用于仿生机器鱼的浮沉装置中,所述弹性组件包括:支撑板和支撑弹簧;所述支撑板设置在所述第二电极上,所述支撑弹簧的一端设置在所述基板上、另一端与所述支撑板相连接。
17.进一步地,所述用于仿生机器鱼的浮沉装置中,所述浮沉部件还包括卡环;所述卡环围绕设置在所述橡胶薄膜层的外侧。
18.进一步地,所述用于仿生机器鱼的浮沉装置中,所述浮沉部件还包括充气管道,所述充气管道穿过所述卡环、橡胶薄膜层、第二空腔、电极层和介电弹性体薄膜层连通至所述第一空腔。
19.进一步地,所述用于仿生机器鱼的浮沉装置中,所述浮沉部件还包括支撑块;所述支撑块设置在所述第一电极上、且与所述橡胶薄膜层相连接。
20.一种仿生机器鱼,其中,包括上述的用于仿生机器鱼的浮沉装置。
21.本实用新型所采用的技术方案具有以下有益效果:
22.本实用新型所提供的用于仿生机器鱼的浮沉装置,包括基板和浮沉部件;所述浮沉部件对称设置在所述基板的两侧面;所述浮沉部件包括:介电弹性体薄膜层、电极层、导电组件以及弹性组件;所述介电弹性体薄膜层设置在所述基板上,所述介电弹性体薄膜层与所述基板之间形成弧形状的第一空腔;所述电极层包裹设置在所述介电弹性体薄膜层上;所述导电组件与所述电极层电连接;所述弹性组件一端设置在所述基板上、另一端连接于所述介电弹性体薄膜层。本实用新型实施例中的用于仿生机器鱼的浮沉装置可通过控制接入导电组件的外部电源的电压值改变其体积以改变仿生机器鱼所受水的浮力,进而实现仿生机器鱼的上浮、浮停以及下沉的动作。所述浮沉装置与自然界中鱼身体中的鱼鳔具有类似的形状,且控制浮沉的原理相似,因此所述浮沉装置的仿生性能更佳。
附图说明
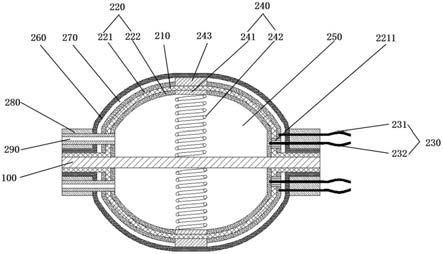
23.图1为本实用新型提供的一种用于仿生机器鱼的浮沉装置的主视剖视图;
24.图2为本实用新型提供的一种用于仿生机器鱼的浮沉装置的侧视剖视图;
25.图3为本实用新型提供的一种用于仿生机器鱼的浮沉装置的外部结构示意图;
26.图4为本实用新型提供的一种用于仿生机器鱼的浮沉装置中的充气管道的结构示意图;
27.图5为本实用新型提供的一种仿生机器鱼的结构示意图。
28.图中:100、基板;210、介电弹性体薄膜层;220、电极层;230、导电组件;240、弹性组
件;250、第一空腔;260、橡胶薄膜层;270、第二空腔;221、第一电极;222、第二电极;231、第一导电条;232、第二导电条;2211、第一绝缘通道;241、支撑板;242、支撑弹簧;280、卡环;290、充气管道;243、支撑块。
具体实施方式
29.为使本实用新型的目的、技术方案及效果更加清楚、明确,以下参照附图并举实施例对本实用新型进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
30.在实施方式和申请专利范围中,除非文中对于冠词有特别限定,否则“一”与“所述”可泛指单一个或复数个。
31.另外,若本实用新型实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
32.实施例一:
33.本实用新型公开了一种用于仿生机器鱼的浮沉装置(以下简称浮沉装置),请一并参阅图1至图4,包括:基板100和浮沉部件;所述浮沉部件对称设置在所述基板100的两侧面;所述浮沉部件包括:介电弹性体薄膜层210、电极层220、导电组件230以及弹性组件240;所述介电弹性体薄膜层210设置在所述基板100上,所述介电弹性体薄膜层210与所述基板100之间形成弧形状的第一空腔250;所述电极层220包裹设置在所述介电弹性体薄膜层210上;所述导电组件230与所述电极层220电连接;所述弹性组件240一端设置在所述基板100上、另一端连接于所述介电弹性体薄膜层210。
34.在本实用新型实施例中,请一并参阅图1和图2,所述基板100呈椭圆柱形,所述浮沉部件呈椭球状,且所述浮沉部件朝向所述基板100的表面与所述基板100连接固定,且所述浮沉部件对称设置在所述基板100的上下两个侧面上,上下两个浮沉部件与基板100形成一椭球状;具体的,上下两个浮沉部件中的介电弹性体薄膜层210的边缘固定于所述基板100上。其中,所述介电弹性体薄膜层210呈半椭球状,因此所述第一空腔250呈弧形状(半椭球状),其中,所述第一空腔250内预留有大于大气压力的空气,使得介电弹性体薄膜层210具有一定的张紧力以保持半椭球形状。所述电极层220分别设置在所述介电弹性体薄膜层210朝向所述基板100的一侧和远离基板100的一侧上,将所述介电弹性体薄膜层210包裹其中。可选的,所述电极层220可通过涂覆的方式设置在所述介电弹性体薄膜层210的内外两侧上;进一步地,所述导电组件230与所述电极层220电连接,用于给所述电极层220提供所需电势差。
35.在实际使用时,将装配有所述浮沉装置的仿生机器鱼置于水下,由于没有外加电场的作用,所述介电弹性体薄膜层210的延展性较小,水对于整个浮尘装置的压力以及所述介电弹性体薄膜层210的张紧力和所述弹性组件240的弹力以及第一空腔250中空气的压力处于平衡状态,如此时仿生机器鱼的重力大于其所受到的水的浮力,其可实现下沉运动。而
通过对两个浮沉部件中的导电组件230上电,使得与导电组件230连接的电极层220之间产生电势差,进而使得介电弹性体薄膜层210所在位置产生电场,从而使得所述介电弹性体薄膜层210将在沿电场线的方向产生收缩,而在垂直于电场线的方向,介电弹性体薄膜层210将沿预拉伸的方向延伸,其表面积将增大,导致介电弹性体薄膜层210的张紧力减小,在所述第一空腔250内空气压力以及所述弹性组件240的弹力的作用下,浮沉装置的体积向外膨胀,体积增大后的浮沉装置将使得装配有浮沉装置的仿生机器鱼的体积增大,进而使其所受到水的浮力增大,且其重力没有变化,此时装配有所述浮沉装置的仿生机器鱼将可实现上浮运动。需要说明的是,所述介电弹性体薄膜层210的延展性能由电场强度决定,因此将电场调节到合适的强度以获得合适的浮沉装置的体积,如果此时仿生机器鱼的浮力与其重力相平衡,仿生机器鱼可实现在水中的浮停。
36.可选的,所述基板100选择为尼龙材质,厚度为1.5mm,如此设置,可保证基板100具有足够的强度,同时质量较轻,且不导电;所述介电弹性体薄膜层210的材质为丙烯酸或硅橡胶材料,可拉伸性好,未拉伸状态下厚度为1.5mm,如此设置,其柔性好,使得仿生效果好,延展性好,使得可变形量大,且不导电。
37.进一步地,所述用于仿生机器鱼的浮沉装置所述浮沉部件还包括橡胶薄膜层260;所述橡胶薄膜层260设置在所述介电弹性体薄膜层210上,所述橡胶薄膜层260与所述介电弹性体薄膜层210之间形成弧形状的第二空腔270。具体的,所述橡胶薄膜层260呈椭球状,位于所述橡胶薄膜层260的边缘处且朝向所述介电弹性体薄膜层210的端面与所述介电弹性体薄膜连接,可选的,可通过粘接剂连接所述橡胶薄膜层260和所述介电弹性体薄膜层210;进一步地,所述橡胶薄膜层260用于隔离所述电极层220和所述仿生机器鱼中的其他零部件,防止所述电极层220和所述仿生机器鱼中的其他零部件导通并避免电极层220被所述仿生机器鱼中的其他零部件摩擦脱落,所述第二空腔270内预留有等同于大气压力的空气,所述第二空腔270用于隔离所述电极层220和所述橡胶薄膜层260,防止所述电极层220被所述橡胶薄膜层260摩擦脱落。
38.可选的,所述橡胶薄膜层260为硅橡胶材质,厚度为0.2mm,如此设置,柔性好、延展性强、可变形量大、且不导电,仿生效果更佳。
39.更进一步地,所述电极层220包括:第一电极221和第二电极222;所述第一电极221设置在所述介电弹性体薄膜层210远离所述基板100的一侧,所述第二电极222设置在所述介电弹性体薄膜层210靠近所述基板100的一侧。具体的,所述第一电极221与所述介电弹性体薄膜层210外侧的形状一致,所述第二电极222与所述介电弹性体薄膜层210内侧的形状一致,其中,所述第一电极221和第二电极222均为凝胶态,且具有一定的粘性,以加强与所述介电弹性体薄膜层210的连接,进一步地防止被所述橡胶薄膜层260摩擦脱落。
40.更进一步地,所述导电组件230包括:第一导电条231和第二导电条232;所述第一导电条231与所述第一电极221连接,所述第二导电条232与所述第二电极222连接。其中,所述第一导电体用于连接外部电源的正极,所述第二导电体用于连接外部电源的负极,以此使得第一电极221和第二电极222之间产生电势差,进而在第一电极221和第二电极222之间的区域即所述介电弹性体薄膜层210所在位置形成电场。
41.可选的,所述第一电极221和第二电极222由石墨材料制成,为凝胶态,存在一定的粘性,可涂覆于介电弹性体薄膜层210的内外表面,厚度为0.2mm,如此设置,其柔性好,使得
仿生效果好,延展性好,使得可变形量大,可导电,用于产生所需电场。所述第一导电条231和第二导电条232为导电铜箔胶带,由铜、导电胶、离层纸制成,如此设置,质量轻、体积小、有较好导电性,可将外部电源与第一电极221和第二电极222进行连接。
42.更进一步地,所述第一电极221和所述介电弹性体薄膜层210内开设有第一绝缘通道2211,所述第二导电条232穿过所述第一绝缘通道2211与所述第二电极222连接。
43.在本实用新型实施例中,由于所述第二电极222设置在所述介电弹性体薄膜层210的内侧,所述第二导电条232要与所述第二电极222连接需要穿过所述第一电极221和所述介电弹性体薄膜层210,因此在所述第一电极221和所述介电弹性体薄膜层210上开设有与所述第二导电条232位置对应的第一绝缘通道2211,以使所述第二导电条232与所述第二电极222电连接,从而防止所述第二导电条232与所述第一电极221导通。其中,所述第一绝缘管道2211采用尼龙材质,外径为1.8mm,内径为0.8mm,高为1.7mm,具有绝缘性。可选的,可通过粘结剂将所述第一绝缘通道2211与所述第一电极221和所述介电弹性体薄膜层210相连接。
44.更进一步地,所述弹性组件240包括:支撑板241和支撑弹簧242;所述支撑板241设置在所述第二电极222上,所述支撑弹簧242的一端设置在所述基板100上、另一端与所述支撑板241相连接。其中,所述支撑板241呈圆柱形,所述支撑板241位于所述第二电极222中部位置以支撑所述支撑弹簧242,所述支撑板241的上表面与所述介电弹性体薄膜层210的内表面(靠近所述基板100的一侧)相贴合,所述支撑板241的圆柱面与所述第二电极222相贴合,可选的,可通过粘接剂将所述支撑板241与所述介电弹性体薄膜层210和所述第二电极222连接,从而通过所述弹性组件240对所述浮沉部件的结构起到支撑作用。
45.在本实用新型实施例中,所述支撑弹簧242为316不锈钢材质,如此设置,其弹力可对所述浮沉装置的结构起到支撑作用,对所述介电弹性体薄膜层210施加电场使其延展性变强。而整个弹性组件240产生的弹力可驱动介电弹性体薄膜层210向所述浮沉装置的两侧延伸,增大浮沉装置的体积;在所述浮沉装置装配过程中,第二空腔270中预留有等同于大气压力的空气,用于将第一电极221与橡胶薄膜层260进行隔离,由于第一电极221和第二电极222为凝胶态,具有一定的粘性,如此设置,可防止由于第一电极221与所述橡胶薄膜层260之间的形变不一致导致第一电极221被摩擦脱落的现象发生。
46.更进一步地,所述浮沉部件还包括卡环280;所述卡环280围绕设置在所述橡胶薄膜层260的外侧。所述卡环280呈圆环状,用于固定整个浮沉部件保证整个浮沉部件的强度,以及起到绝缘作用。
47.更进一步地,请继续参阅图4,所述浮沉部件还包括充气管道290,所述充气管道290穿过所述卡环280、橡胶薄膜层260、第二空腔270、电极层220和介电弹性体薄膜层210连通至所述第一空腔250。
48.在本实用新型实施例中,所述充气管道290为中空管道,且所述充气管道290与所述卡环280之间的连接采用过盈配合方式,并与所述第一导电条231和第二导电条232对称设置所述浮沉部件的两侧,其中,所述充气管道290用于在所述浮沉装置下水前,向所述第一空腔250内充入大于大气压力的空气,在所述第一空腔250内充入空气后,通过石蜡将所述充气管道290进行密封,从而防止所述第一空腔250内的空气泄漏,从而使得所述浮沉部件保持半椭球状,而所述浮沉装置保持椭球状,与自然界中鱼身体内的内的鱼鳔形状更为
相似,从而使所述浮沉装置仿生效果更佳。
49.可选的,所述充气管道290的外径为2.0mm,内径为1.2mm,采用尼龙材质,如此设置,可保证充气管道290具有足够的强度,同时质量较轻,且不导电。
50.更进一步地,所述浮沉部件还包括支撑块243;所述支撑块243设置在所述第一电极221上、且与所述橡胶薄膜层260相连接。具体的,所述支撑块243呈圆柱形,位于所述第一电极221的中部和所述橡胶薄膜层260的中部;所述支撑块243的上表面与所述橡胶薄膜层260的内表面相贴合,所述支撑块243的下表面与所述介电弹性体薄膜层210的外表面相贴合,所述支撑块243的圆柱面与所述第一电极221相贴合,可选的,可通过粘接剂将所述支撑块243与所述橡胶薄膜层260、介电弹性体薄膜层210和第一电极221相连接;所述支撑块243用于支撑所述橡胶薄膜层260,以及隔开所述第一电极221和橡胶薄膜层260,同时与所述弹性组件240一并对所述浮沉部件的结构起到支撑作用,加强所述浮沉部件的强度。
51.下面对本实施例中的用于仿生机器鱼的浮沉装置的工作原理进行介绍:
52.将常态下厚度为1.5mm的介电弹性体薄膜层210朝着表面积变大的方向向四周进行预拉伸,预拉伸时其厚度方向将产生收缩,预拉伸时应保证其厚度收缩至0.2mm左右;
53.在处于拉伸状态下的介电弹性体薄膜层210的外表面涂覆上第一电极221,内表面涂覆上第二电极222,涂覆厚度为0.2mm;
54.然后将介电弹性体薄膜层210恢复至常态并按照图1和图2所示的结构进行安装,其边缘固定于硬度较大的且具有椭圆截面的基板100和卡环280之间,顶部或底部由预先处于压缩状态的弹性组件240进行支撑,且第一空腔250内通过充气管道290预先充入了大于大气压力的空气,安装后的介电弹性体薄膜层210为椭球形且其厚度收缩至1.0-1.2mm之间,与自然界中鱼身体内的鱼鳔具有相似的形状,仿生效果更加,便于安装在仿生机器鱼机身内部。
55.将装配有所述浮沉装置的仿生机器鱼置于水下,由于没有外加电场的作用,介电弹性体薄膜层210的延展性较小,水对于橡胶薄膜层260的压力以及介电弹性体薄膜层210的张紧力和弹性组件240的弹力、第一空腔250内空气的压力处于平衡状态,此时仿生机器鱼的重力大于其所受到的水的浮力,其可实现下沉运动。
56.在第一导电条231接入外部电源的正电压;在第二导电条232接入外部电源的负电压,由于第一导电条231与第一电极221连接,第二导电条232与第二电极222连接,因此第一电极221将具有高电势且充满正电荷,第二电极222将具有低电势且充满负电荷。此时,介电弹性体薄膜层210将处于第一电极221和第二电极222所产生的电场内。第一电极221上的正电荷与第二电极222上的负电荷相互吸引,所产生的静电力将使得介电弹性体薄膜层210在沿电场线的方向上产生收缩;而第一电极221和第二电极222上的同性电荷相互排斥,所产生的静电力将使得介电弹性体薄膜层210在垂直于电场线的方向上沿预拉伸的方向延伸。因此,在第一导电条231和第二导电条232分别接入正电压和负电压后,在静电力的作用下,介电弹性体薄膜层210的表面积将增大,导致介电弹性体薄膜层210的张紧力减小,在第一空腔250内空气压力以及弹性组件240的弹力的作用下,所述浮沉装置体积向外膨胀,直到水对于橡胶薄膜层260的压力以及介电弹性体薄膜层210的张紧力和弹性组件240的弹力以及第一空腔250内空气的压力达到平衡状态。体积增大后的浮沉装置将使得仿生机器鱼的体积增大,进而使其所受到水的浮力增大,且其重力没有变化,此时装配有所述浮沉装置的
仿生机器鱼将可实现上浮运动。介电弹性体薄膜层210的延展性能由电场强度决定,因此通过调节第一导电条231和第二导电条232外接电源的电压值将电场调节到合适的强度以获得合适的浮沉装置的体积,如果此时仿生机器鱼的浮力与其重力相平衡,仿生机器鱼可实现在水中的浮停。
57.当所述仿生机器鱼需要实现上浮运动时,外接电源的电压值应调节至6000-8000v之间,介电弹性体薄膜层210的厚度可收缩至0.35-0.55mm之间;当所述仿生机器鱼需要实现浮停动作时,外接电源的电压值应调节至4000-5000v之间,介电弹性体薄膜层210的厚度可收缩至0.75-0.85mm之间。
58.需要说明的是,由于所述浮沉部件相对于所述基板100为上下对称设置,上述所述原理仅为一侧的浮沉部件,另一侧浮沉部件结构与原理相同,故不再赘述。
59.本实用新型中的用于仿生机器鱼的浮沉装置相比较现有技术有以下优点:
60.自然界中的鱼靠鱼鳔肌控制鱼鳔的体积大小以调整其身体的整体体积,进而调整其在水下的浮力以实现上浮或下沉的动作。介电弹性体材料常被用做人工肌肉并实现机器人的驱动,因此,为了达到更好的仿生效果,本实用新型利用介电弹性体材料实现一种可控制仿生机器鱼上浮、浮停以及下沉的装置。介电弹性体薄膜层210在电场下,其延展性会有所提高,利用介电弹性体薄膜层210形成第一空腔250,在第一空腔250内预先充入大于大气压力的空气,使其具有椭球形状,并对介电弹性体薄膜层210施加电场以增强其延展性。在第一空腔250内气体的压力以及置于第一空腔250内的弹性组件240的弹力作用下,延展后的介电弹性体薄膜层210表面积变大,导致第一空腔250的体积也随之增大,进而使得所述浮沉装置的整体体积变大。将所述浮沉装置装配于仿生机器鱼内部,可通过调节电场的强度,控制仿生机器鱼的上浮、浮停以及下沉的运动。本实用新型具有体积小、响应快、无噪声、能耗低、结构简单、成本低、质量轻、柔性好、仿生性能佳等优点。
61.实施例二:
62.本实用新型在上述用于仿生机器鱼的浮沉装置的基础上,还公开了一种仿生机器鱼,请参阅图5,所述仿生机器鱼包括仿生机器鱼本体1和上述的用于仿生机器鱼的浮沉装置2,应理解的是,所述仿生机器鱼还包括其他现有结构,在此不做赘述。
63.综上所述,本实用新型提供了一种用于仿生机器鱼的浮沉装置及仿生机器鱼,包括基板和浮沉部件;所述浮沉部件对称设置在所述基板的两侧面;所述浮沉部件包括:介电弹性体薄膜层、电极层、导电组件以及弹性组件;所述介电弹性体薄膜层设置在所述基板上,所述介电弹性体薄膜层与所述基板之间形成弧形状的第一空腔;所述电极层包裹设置在所述介电弹性体薄膜层上;所述导电组件与所述电极层电连接;所述弹性组件一端设置在所述基板上、另一端连接于所述介电弹性体薄膜层。本实用新型实施例中的用于仿生机器鱼的浮沉装置可通过控制接入导电组件的外部电源的电压值改变其体积以改变仿生机器鱼所受水的浮力,进而实现仿生机器鱼的上浮、浮停以及下沉的动作。所述浮沉装置与自然界中鱼身体中的鱼鳔具有类似的形状,且控制浮沉的原理相似,因此所述浮沉装置的仿生性能更佳。
64.本领域技术人员在考虑说明书及实践这里公开的方案后,将容易想到本实用新型的其它实施方案。本实用新型旨在涵盖本实用新型的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本实用新型的一般性原理并包括本公开未公开的本技术领
域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本实用新型的真正范围和精神由权利要求所指出。