1.本发明涉及机器人领域,特别涉及一种用于曲面船体的水下垃圾清理回收机器人。
背景技术:
2.海水中富含多种盐类,是一种具有较强腐蚀性的电解质溶液。远洋船舶长时间在海中航行,其金属材质的船底与海水持续接触,易产生电化学腐蚀,导致船底锈蚀。同时,船舶底部多附着有大量的难以清除的海洋生物,增大船舶航行阻力,增大船舶运行油耗,降低船舶航行速度,缩短船舶服务寿命。当前远洋运输行业多采用履带轮磁吸附式垂直爬壁机器人清洗的方法来清洗船底的锈斑和海洋生物以提高船舶服务寿命。这种机器人清洗方式要求船舶船体曲率半径要足够小,履带式永磁轮在船体表面转向困难,因此适用的工作环境有限,同时,该类机器人通过射流清洗的海洋垃圾难以回收,对海洋生态环境造成一定污染。本发明设计了一种适用于不规则曲面船体的水下垃圾清理回收机器人,可实现对船底附着海洋生物及锈斑的清理、回收功能,具有清洗效率高,环境污染小的特点。
技术实现要素:
3.本发明的目的是提供一种用于曲面船体的水下垃圾清理回收机器人,其通过采用轮式行走机构与曲面适应机构相配合,以适应不同曲率半径的船体表面。
4.本发明的技术方案是,一种用于曲面船体的水下垃圾清理回收机器人,其包括:
5.机器人箱体;
6.清洗机构,包括安装在机器人箱体上的四自由度机械臂以及安装在四自由度机械臂末端的射流喷嘴;
7.垃圾回收机构,包括垃圾回收管路、与垃圾回收管路的末端连接的螺旋离心泵以及连接在所述螺旋离心泵出口的过滤回收箱;所述垃圾回收管路中设置有一个通过转动粉碎并输送垃圾的粉碎螺杆;
8.两个行走机构,分别设置在机器人箱体的两侧,通过曲面适应机构与所述机器人箱体连接,每个所述行走机构包括一个永磁轮以及与所述永磁轮传动连接的传动箱;
9.所述曲面适应机构包括液压油缸以及弹性合页;所述弹性合页连接在所述机器人箱体以及所述传动箱之间;所述液压油缸的两端分别与所述机器人箱体以及所述传动箱通过转动副连接,以推动所述传动箱转动;
10.转向机构,设置在机器人箱体的底部,包括永磁万向轮及一个弹簧减震机构;
11.控制系统,分别与所述清洗机构、所述垃圾回收机构、所述行走机构、所述曲面适应机构以及转向机构连接;所述机器人箱体的两侧还设置有声波传感器,用于检测所述行走机构所在位置的船体曲率半径;所述控制系统根据检测的曲率半径控制相应的曲面适应机构调节所述行走机构的永磁轮的倾角,使得永磁轮与船体表面贴合吸附。
12.本发明的进一步改进在于:所述机器人箱体的四角分别设置有一个螺旋推进器,
各所述螺旋推进器与所述控制系统电性连接,并在所述控制系统的控制下调节水下垃圾清理回收机器人的水下姿态。
13.本发明的进一步改进在于:所述机器人箱体上设置有位于所述清洗机构前方的摄像头,所述摄像头与所述控制系统电性连接。
14.本发明的进一步改进在于:所述控制系统连接有通信系统,所述控制系统通过所述通信系统将摄像头拍摄的图像回传。
15.本发明的进一步改进在于:所述机器人箱体上设置有位于所述清洗机构两侧的射灯。
16.本发明的进一步改进在于:两个所述曲面适应机构的液压油缸通过液压油管与伺服液压泵站连接;与液压油缸连接的一个液压油管上设置有双向液压锁,双向液压锁用于控制液压油缸在任意位置停止,并使得液压油不回流,进而使得在液压油缸工作过程中随时都能支撑行走机构吸附在船体的表面。
17.本发明的进一步改进在于:所述垃圾回收机构中还包括驱动粉碎螺杆转动的第一电机以及驱动所述螺旋离心泵的第二电机。
18.本发明的有益效果为:通过设置垃圾清理回收装置,将被空化射流清扫下的垃圾进行粉碎、回收处理,最大限度避免污染海洋生态环境;通过在机器人行走机构两侧设置液压油缸,控制机构与液压泵站、双向液压锁连接控制液压油缸的伸缩实现传动机构绕固定铰链转动,使得永磁轮的行走面与船体表面始终贴合,保证永磁轮能够吸附在不同曲率半径的船体表面,增强机器人吸附稳定性。
附图说明
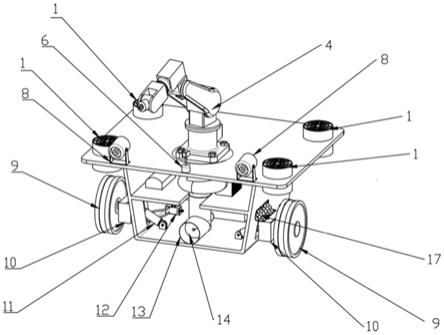
19.图1为本发明实施例公开的一种用于曲面船体的水下垃圾清理回收机器人的整体结构示意图;
20.图2为本发明实施例公开的一种用于曲面船体的水下垃圾清理回收机器人的正面结构示意图;
21.图3为本发明实施例公开的一种用于曲面船体的水下垃圾清理回收机器人的右侧面结构示意图;
22.图4为本发明实施例公开的一种用于曲面船体的水下垃圾清理回收机器人的控制系统工作示意图;
23.图5为本发明实施例公开的一种用于曲面船体的水下垃圾清理回收机器人的工作流程图。
具体实施方式
24.实施例:结合图1、图2以及图3,本实施例提供一种用于曲面船体的水下垃圾清理回收机器人,其包括:机器人箱体、清洗机构、垃圾回收机构、行走机构、曲面适应机构、转向机构以及控制系统。具体的:
25.机器人箱体呈方形,其底面的两侧向侧方延伸形成翼板。机器人箱体的内被隔板分为部分为上层和下层。机器人箱体的上层设置有配电箱28,用于对各设备进行供电。
26.清洗机构包括安装在机器人箱体顶面上的四自由度机械臂4以及安装在四自由度
机械臂4末端的射流喷嘴。射流喷嘴用于喷水形成空化射流对船体表面进行清理,使得附着在船体表面的垃圾与船体脱离。四自由度机械臂4用于将射流喷嘴运送至清理位置。
27.垃圾回收机构设置在机器人箱体的上层,包括垃圾回收管路13、与垃圾回收管路13的末端连接的螺旋离心泵27以及连接在螺旋离心泵27出口的过滤回收箱26。垃圾回收管路13中设置有一个通过转动粉碎并输送垃圾的粉碎螺杆14。垃圾回收机构中还包括驱动粉碎螺杆14转动的第一电机以及驱动螺旋离心泵27的第二电机。
28.垃圾回收管路13的入口用于吸取清洗机构冲下的垃圾,并通过粉碎螺杆14对垃圾进行粉碎。螺旋离心泵27转动的过程中将粉碎后的垃圾吸入,并输送至过滤回收箱26,对垃圾进行过滤收集。
29.两个行走机构分别设置在机器人箱体的两侧,并通过曲面适应机构与机器人箱体连接。每个行走机构包括一个永磁轮9以及与永磁轮9通过传动轴19传动连接的传动箱10,传动箱10用于驱动永磁轮9转动。永磁轮9的行走面上设置有永磁铁,用于和船体的表面吸附。
30.每个曲面适应机构包括液压油缸11以及弹性合页17。弹性合页17包括两个铰接的连接片,其中一个连接片与机器人箱体的侧板通过螺钉连接,另一个连接片与传动箱10的内侧面顶部通过螺钉连接。两个曲面适应机构的弹性合页17的枢轴平行。液压油缸11的液压油缸11的两端分别与机器人箱体以及传动箱10通过转动副连接。本实施例中,液压油缸11与传动箱10的内侧面底部转动连接,另一端穿过机器人箱体侧壁的槽孔与机器人箱体的底板上表面转动连接。液压油缸11转动时,可推动相应的行走机构沿着对应的弹性合页17的枢轴转动,从而使得相应的永磁轮9的行走面的角度发生变化,以适应不同曲率半径的船体表面。
31.在一个具体实施例中,两个曲面适应机构的液压油缸11通过液压油管与伺服液压泵站21连接;与液压油缸11连接的一个液压油管上设置有双向液压锁12。伺服液压泵站21为两个曲面适应机构的液压油缸11供油。双向液压锁12由控制系统进行控制。向液压锁用于控制液压油缸在任意位置停止,并使得液压油不回流,进而使得在液压油缸工作过程中随时都能支撑行走机构以任意角度吸附在船体的表面。
32.转向机构设置在机器人箱体的底部,包括永磁万向轮29及一个弹簧减震机构30。永磁万向轮29可增大水下垃圾清理回收机器人吸附曲面船体面积,支承水下垃圾清理回收机器人,改变机器人工作运动方向;弹簧减震机构30用于抵消清洗机构清洗船体时所产生的倾覆力矩。
33.控制系统,分别与清洗机构、垃圾回收机构、行走机构、曲面适应机构以及转向机构连接;机器人箱体的两侧的裙板上还设置有声波传感器22,用于检测行走机构所在位置的船体曲率半径。控制根据检测的曲率半径控制相应的曲面适应机构调节行走机构的永磁轮9的倾角,使得永磁轮与船体表面贴合吸附。
34.声波传感器22的原理是:声波传感器22发射脉冲信号,形成一个扇形扫描区域,每个脉冲包含多个声学波束,以相同间隔排列。声波传感器22接收到目标物(船体表面)反射的信号后,结合反射波束指向、振幅及相位检测等技术,得到被探测区域的曲率半径以及位置信息。结合水下垃圾清理回收机器人的运动轨迹以及多次探测得到的曲率半径以及位置信息,可以临近区域的船体表面形状进行插值和推测。在吸附和行走过程中,水下垃圾清理
回收机器人根据其自身位置计算两个行走机构的永磁轮9的倾角,使得永磁轮9的倾角与船体表面保持贴合。
35.本实施例中,机器人箱体的四角分别设置有一个螺旋推进器1,各螺旋推进器1与控制系统电性连接,并在控制系统的控制下调节水下垃圾清理回收机器人的水下航行时的姿态。
36.机器人箱体上设置有位于清洗机构前方的摄像头6,摄像头与控制系统电性连接。摄像头6用于拍水下的实时画面。机器人箱体上设置有位于清洗机构两侧的射灯8,射灯8用于为摄像头6提供照明。
37.控制系统连接有通信系统,控制系统通过通信系统将摄像头6拍摄的图像回传至水上的控制中心,并根据控制中心的各种指令对机器人急性控制。
38.结合图4,为本发明实施例公开的一种用于曲面船体的水下垃圾清理回收机器人的控制系统工作示意图,其中,控制系统采用stm32单片机,摄像头6与显示器通过usb接口与stm32单片机相连,摄像头6开机后将水下画面实时传输到stm32单片机,岸上操作人员通过显示器显示画面确定清洗位置;清洗系统通过gpio端口与stm32单片机连接,确定清洗位置后操作人员通过stm32单片机控制系统控制四自由度机械臂4移动;定位系统通过com4端口与stm32单片机连接,定位系统将清洗机器人坐标传输至stm32单片机以便清洗完成后回收;两个声波传感器22通过rs485端口与stm32单片机连接,声波传感器22探测清洗机器人吸附船体的表面曲率半径,并将探测数据传输至stm32单片机进行处理,伺服液压泵站21通过gpio端口与stm32单片机连接,stm32单片机将声波传感器22传输信息处理后通过控制系统分别控制两个液压油缸11伸缩保证永磁轮9完全吸附在船体表面;通讯系统通过rx/tx端口与stm32单片机连接,完成信号发射、接收功能;行走系统通过gpio端口与stm32单片机连接,清洗过程中stm32单片机控制系统通过控制清洗机器人的行走系统来控制机器人在水下的运动。
39.结合图5,为本发明实施例公开的一种用于曲面船体的水下垃圾清理回收机器人的工作流程图,一种用于曲面船体的水下垃圾清理回收机器人的具体工作过程为:控制系统初始化,机器人下水,机器人照明系统打开,到达指定位置后永磁轮9吸附在船体表面,此时机器人上声波传感器22和摄像头6开始工作;声波传感器22将船体表面曲率半径数据传输至stm32单片机,stm32单片机将采集数据进行处理,判断相应两个永磁轮9是否完全吸附在所需清理船体表面,若永磁轮9均已完全吸附在船体表面,摄像头6将水下船体状况传输至stm32单片机,岸上操作人员通过显示器观察后确定清理位置,同时,岸上操作人员通过stm32单片机控制部分控制四自由度机械臂4移动至所需清理位置附近,确定到达指定位置后,stm32单片机控制系统控制射流喷嘴进行清洗,射流喷嘴开始工作后,stm32单片机控制系统控制螺旋离心泵27以及粉碎螺杆14的电机转动,螺旋离心泵27的叶轮旋转产生吸力将射流喷嘴清洗下的垃圾吸入垃圾回收管路13,垃圾回收管路13中设置的粉碎螺杆14转动,运输垃圾同时通过挤压作用将垃圾进行粉碎,被粉碎过的垃圾进入螺旋离心泵27内部,由于螺旋离心泵27的叶轮的离心作用,所粉碎垃圾被甩出到与螺旋离心泵27相连的过滤回收箱26中,实现海水与垃圾分离。若两个永磁轮9没有完全吸附在所需清理船体表面,stm32单片机根据声波传感器22检测的船体表面曲率半径数据确定两个液压油缸11伸缩所需供油量,stm32单片机控制系统控制伺服液压泵站21分别对两个液压油缸11进行供油,液压油缸
11受油后推杆分别伸缩一定长度,带动两个传动箱10绕着相应弹性合页17的枢轴转动预定角度,使两个永磁轮9完全吸附在所需清理船体表面,重复上述永磁轮完全吸附在船体表面时的清洗动作。
40.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。