1.本发明涉及一种角度调节试验装置,属于模型试验领域,适用于水下或者不利环境下对于目标单元的角度有调节需求和精度要求的试验工况。
背景技术:
2.压浪板是船舶和两栖车常用的减阻附体之一,具有结构简单、安装方便、减阻效果好等优点。对于高速船和两栖车,当航速较大时,航行纵倾角会随航速提高而增大。而航行纵倾角增大会使船舶或两栖车的阻力增大。当航速较高时,压浪板通过减小航行纵倾角进而减小船舶阻力;但当航速较低时,航行姿态较为平稳,压浪板的减阻作用很小,甚至可能产生增阻的作用。在实船的运营过程中,对于不同的航速,存在不同的最优压浪板角度。压浪板的最优角度通过模型试验确定。因此在船舶阻力试验中,需要进行多组压浪板角度下的阻力试验,然后根据阻力试验结果得出不同航速下的最优压浪板方案。由于压浪板位于水线以下,以往在变动角度时,需要从拖车上拆卸船模,再调整压浪板的角度。整个过程费时费力,并且不容易对控制角度的精度。
技术实现要素:
3.为了解决现有技术存在的问题,本发明提供一种角度调节试验装置。
4.为实现上述目的,本发明采用如下方案:
5.一种角度调节试验装置,包括:
6.pid控制系统,连接伺服电机,用于控制伺服电机;
7.伺服电机,连接电动推杆,用于驱动电机推杆直线运动;
8.电动推杆,连接目标单元,用于驱动目标单元绕转轴转动。
9.进一步,所述电动推杆上设有刻度,用于标定电动推杆伸出长度。
10.进一步,所述电动推杆顶部通过底座固定在目标位置上。
11.进一步,所述电动推杆顶部与底座铰接;所述电动推杆端部与目标单元铰接。
12.进一步,所述目标单元通过合页与目标位置转动连接。
13.进一步,所述目标位置为船模尾封板;所述目标单元为压浪板。
14.进一步,所述压浪板的自由端通过压浪板底座与电动推杆连接,且电动推杆与压浪板底座之间铰接。
15.进一步,所述压浪板的固定端通过合页固定在船模尾端面外侧上,且压浪板能够绕合页转轴自由转动。
16.进一步,所述电动推杆通过连接杆与压浪板底座铰接。
17.进一步,工作时,所述pid控制系统输入参数后,控制伺服电机驱动电动推杆做直线运动,进而推动压浪板绕合页转轴转动。
18.本发明的有益效果是:
19.相对于现有技术,本发明所采用的技术方案在显著减少模型拆装时间的同时,保
证了角度调节的精度,提高了试验的精度和效率,具有较高的实用价值。适用于水下或不利条件下对目标单元的角度有调节需求和精度要求的试验工况。
附图说明
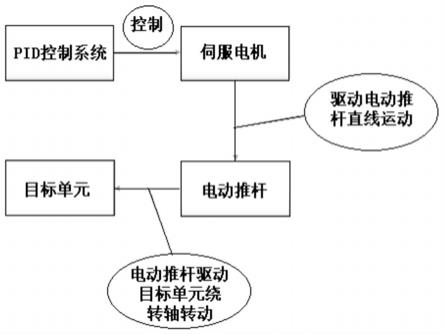
20.图1为本发明的一种角度调节试验装置的原理图;
21.图2为本发明的实施例提供的一种角度调节试验装置结构正视图;
22.图3为本发明实施例提供的一种角度调节装置结构侧视图。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
25.以下将结合附图对本发明的实施例做具体阐释。
26.图1为本发明实施例的原理图,一种角度调节试验装置主要由:pid控制系统、伺服电机、电动推杆和目标单元四部分组成。通过pid控制系统输入参数,控制伺服电机;伺服电机驱动推杆做直线运动;电动推杆推动目标单元绕转轴转动。
27.如图2至图3所示,本发明的实施例的一种角度调节试验装置的结构正视图和侧视图。电动推杆底座2固定于船模尾封板外端面1,电动推杆4与电动推杆底座2铰接。电动推杆4上做有刻度,用于标定pid控制系统的控制精度。压浪板8为目标单元,合页9一页固定在船模尾端面外侧1上,另一页固定在压浪板8上,压浪板可绕合页转轴自由转动。电动推杆4与连接杆一5、连接杆一5和连接杆二6固接,连接杆二6和压浪板底座7铰接。压浪板底座7固定于压浪板8自由端一侧。工作时,伺服电机3驱动电动推杆4做直线运动,进而推动压浪板8绕合页9转轴转动。
28.以下是本发明的一种角度调节试验装置应用于一高速艇模型试验的案例。
29.模型长:2.00m
30.模型宽:0.65m
31.设计吃水:100.0mm
32.压浪板长度365.7mm,宽度为118.1mm,目标角度调节范围为0~10
°
。
33.电动推杆收缩长度260mm,行程150mm。连接杆一长56mm,连接杆二长92mm。
34.模型尾端面为长365.7mm,高465.7mm的矩形。
35.本次试验的转动目标单元为压浪板。试验时,将该试验装置安装好之后,提前标定好压浪板转动角度与电动推杆伸出长度之间的函数关系。将电动推杆伸出长度作为控制输入参数,向pid控制系统输入目标值,控制电动推杆伸出的目标长度,进而控制压浪板旋转到目标角度。
36.设计速度点在最优压浪板角度下,减阻效果为3.92%
37.根据以往试验经验,每次模型拆装花费时间在30分钟左右。本案例的压浪板角度
选优试验,包括5组状态共64个数据采集点,即压浪板角度变化次数为64次,节省模型试验时间约32小时。本次模型试验历时3天共24小时,因此采用本试验装置后,提升模型试验效率57%左右。
技术特征:
1.一种角度调节试验装置,其特征在于,包括:pid控制系统,连接伺服电机,用于控制伺服电机;伺服电机,连接电动推杆,用于驱动电机推杆直线运动;电动推杆,连接目标单元,用于驱动目标单元绕转轴转动。2.根据权利要求1所述的角度调节试验装置,其特征在于:所述电动推杆上设有刻度,用于标定电动推杆伸出长度。3.根据权利要求1所述的角度调节试验装置,其特征在于:所述电动推杆顶部通过底座固定在目标位置上。4.根据权利要求1所述的角度调节试验装置,其特征在于:所述电动推杆顶部与底座铰接;所述电动推杆端部与目标单元铰接。5.根据权利要求1所述的角度调节试验装置,其特征在于:所述目标单元通过合页与目标位置转动连接。6.根据权利要求5所述的角度调节试验装置,其特征在于:所述目标位置为船模尾封板;所述目标单元为压浪板。7.根据权利要求6所述的角度调节试验装置,其特征在于:所述压浪板的自由端通过压浪板底座与电动推杆连接,且电动推杆与压浪板底座之间铰接。8.根据权利要求7所述的角度调节试验装置,其特征在于:所述压浪板的固定端通过合页固定在船模尾端面外侧上,且压浪板能够绕合页转轴自由转动。9.根据权利要求6所述的角度调节试验装置,其特征在于:所述电动推杆通过连接杆与压浪板底座铰接。10.根据权利要求1所述的角度调节试验装置,其特征在于:工作时,所述pid控制系统输入参数后,控制伺服电机驱动电动推杆做直线运动,进而推动压浪板绕合页转轴转动。
技术总结
本发明涉及一种角度调节试验装置,包括:PID控制系统,连接伺服电机,用于控制伺服电机;伺服电机,连接电动推杆,用于驱动电机推杆直线运动;电动推杆,连接目标单元,用于驱动目标单元绕转轴转动。相对于现有技术,本发明所采用的技术方案在显著减少模型拆装时间的同时,保证了角度调节的精度,提高了试验的精度和效率,具有较高的实用价值。适用于水下或不利条件下对目标单元的角度有调节需求和精度要求的试验工况。要求的试验工况。要求的试验工况。
技术研发人员:王志勇 熊小青 孙群 沈佳诚 吴琼
受保护的技术使用者:中国船舶工业集团公司第七0八研究所
技术研发日:2021.10.13
技术公布日:2022/1/28