一种能自主防护的高强度m型槽道无人艇
技术领域
1.本实用新型涉及无人艇技术领域,具体为一种能自主防护的高强度m型槽道无人艇。
背景技术:
2.水面无人艇,或称水面机器人,是一种无人直接操作的水面舰艇。相比于一般传统直接操纵,主要优点是可以通过远程操控,从而取代人工操作,特别是用于执行危险及不适于人的高危任务。m型槽道无人艇具有优越的水动力性能和良好的应用前景。
3.但是目前市面上的无人艇由于技术相对不完善,已经无法满足人们的需求了,现有技术中的无人艇对于其自身的防护功能相对落后,从而使得无人艇在实际应用中无法得到广发的应用,并且还会导致无人艇的损坏,造成不必要的损失。所以我们提出了一种能自主防护的高强度m型槽道无人艇,以便于解决上述中提出的问题。
技术实现要素:
4.本实用新型的目的在于提供一种能自主防护的高强度m型槽道无人艇,以解决上述背景技术提出的目前市面上的无人艇由于技术相对不完善,已经无法满足人们的需求了,现有技术中的无人艇对于其自身的防护功能相对落后,从而使得无人艇在实际应用中无法得到广发的应用,并且还会导致无人艇的损坏,造成不必要的损失的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种能自主防护的高强度m型槽道无人艇,包括主体框架、螺纹杆和第二电机,所述主体框架上安装有超声波雷达,且主体框架尾部安装有推进器,所述主体框架上安装有夜视摄像头,且夜视摄像头上包裹有防护罩,所述主体框架上设置有卫星定位器,所述主体框架上安装有传输天线,且主体框架上安装有导流板,所述主体框架上开设有开槽,且开槽内部安装有底座,所述底座内部设置有第一电机,且第一电机上连接有连接框架,所述连接框架上设置有密封垫,且连接框架上设置有led灯珠,所述底座上开设有触发块,且开槽内壁上设置有接触开关,所述底座上开设有连接块,且连接块上贯穿有限位杆,所述连接块上连接有螺纹杆,且螺纹杆上安装有第二电机。
6.优选的,所述超声波雷达在主体框架上均匀分布有六组,且主体框架采用玻璃纤维制作而成。
7.优选的,所述防护罩采用亚克力板制作而成,且防护罩与主体框架之间的连接方式为密封连接。
8.优选的,所述连接框架通过第一电机在底座上构成旋转结构,且连接框架的中轴线与底座的中轴线均在同一竖直线上。
9.优选的,所述led灯珠在连接框架上均匀分布,且连接框架的顶面与主体框架的顶面均在同一水平面上。
10.优选的,所述连接块与螺纹杆之间的连接方式为螺纹连接,且螺纹杆通过第二电
机构成旋转结构,并且连接块与限位杆之间的连接方式为滑动连接。
11.与现有技术相比,本实用新型的有益效果是:该能自主防护的高强度m型槽道无人艇:
12.(1)设置有第二电机、螺纹杆和连接块,可通过第二电机带动螺纹杆旋转从而实现带有led灯珠的连接框架升降,配合夜视摄像头能够使得装置在光线相对暗的情况下进行作业,并且这种方式在光线正常的情况下可以实现隐藏,使得装置更加的实用;
13.(2)设置有第一电机、触发块和接触开关,可通过第一电机带动连接框架进行旋转,从而实现装置照射角度的调节,并且可通过触发块与接触开关相接触从而实现led灯珠的启闭,使得装置更加的实用和应用更加广泛。
附图说明
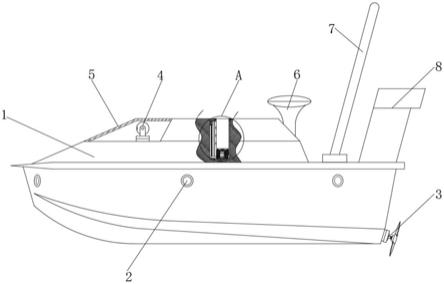
14.图1为本实用新型主体结构示意图;
15.图2为本实用新型主视结构示意图;
16.图3为本实用新型照明框架结构示意图;
17.图4为本实用新型图1中a处结构示意图。
18.图中:1、主体框架;2、超声波雷达;3、推进器;4、夜视摄像头;5、防护罩;6、卫星定位器;7、传输天线;8、导流板;9、开槽;10、底座;11、第一电机;12、连接框架;13、密封垫;14、led灯珠;15、触发块;16、接触开关;17、连接块;18、限位杆;19、螺纹杆;20、第二电机。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.请参阅图1-4,本实用新型提供一种技术方案:一种能自主防护的高强度m型槽道无人艇,包括主体框架1、超声波雷达2、推进器3、夜视摄像头4、防护罩5、卫星定位器6、传输天线7、导流板8、开槽9、底座10、第一电机11、连接框架12、密封垫13、led灯珠14、触发块15、接触开关16、连接块17、限位杆18、螺纹杆19和第二电机20,主体框架1上安装有超声波雷达2,且主体框架1尾部安装有推进器3,主体框架1上安装有夜视摄像头4,且夜视摄像头4上包裹有防护罩5,主体框架1上设置有卫星定位器6,主体框架1上安装有传输天线7,且主体框架1上安装有导流板8,主体框架1上开设有开槽9,且开槽9内部安装有底座10,底座10内部设置有第一电机11,且第一电机11上连接有连接框架12,连接框架12上设置有密封垫13,且连接框架12上设置有led灯珠14,底座10上开设有触发块15,且开槽9内壁上设置有接触开关16,底座10上开设有连接块17,且连接块17上贯穿有限位杆18,连接块17上连接有螺纹杆19,且螺纹杆19上安装有第二电机20。
21.超声波雷达2在主体框架1上均匀分布有六组,且主体框架1采用玻璃纤维制作而成,从而实现对周围的情况进行检测,防止发生碰撞。
22.防护罩5采用亚克力板制作而成,且防护罩5与主体框架1之间的连接方式为密封连接,从而实现对夜视摄像头4进行防护,防止浸水造成不必要的损失。
23.连接框架12通过第一电机11在底座10上构成旋转结构,且连接框架12的中轴线与底座10的中轴线均在同一竖直线上,从而实现角度的调节,使得装置的照射角度能够得到调节。
24.led灯珠14在连接框架12上均匀分布,且连接框架12的顶面与主体框架1的顶面均在同一水平面上,从而实现照明功能,使得装置的应用更加的广泛。
25.连接块17与螺纹杆19之间的连接方式为螺纹连接,且螺纹杆19通过第二电机20构成旋转结构,并且连接块17与限位杆18之间的连接方式为滑动连接,能够实现照明设备的升降,使得装置更加的实用和合理。
26.工作原理:在使用该能自主防护的高强度m型槽道无人艇时,首先,可通过推进器3带动主体框架1作为驱动源,之后通过夜视摄像头4配合传输天线7对周围的环境进行实时的图像传输至操作端,并且在夜视摄像头4上安装了防护罩5,从而实现对夜视摄像头4进行保护。接着在主体框架1上分布了超声波雷达2,通过雷达对附近的环境进行实时的监控,从而保障装置避免发生碰撞。
27.然后在光线相对暗的环境进行作业的时候启动第二电机20带动螺纹杆19使得连接块17在限位杆18上滑动,同时带动连接框架12升起,升起的同时通过底座10上的触发块15与接触开关16相连接,从而控制led灯珠14启动。最后如需要对照明的角度进行调节时,启动底座10内部的第一电机11带动连接框架12旋转,从而实现照明角度的调节。这就是整个工作流程。且本说明书中未作详细描述的内容均属于本领域专业技术人员公知的现有技术。
28.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。