1.本发明涉及水下无人航行器技术领域,尤其是一种水下无人航行器航姿转换机构及操作方法。
背景技术:
2.由于海洋工程和石油开发,以及军事、海洋科考领域的需要,作为海洋开发重要工具的水下无人水下航行器(auv)特别是大深度水下无人航行器得到了快速发展。
3.auv通常采用水滴型外形,该种外形长径比较大,垂向投影面积远大于纵向投影面积,这就导致其纵向前进的阻力远小于垂向运动的阻力。auv在作业时通常先通过推进器提供的垂向推力下潜至预定深度,然后在预定深度处开展水平面巡航。在潜深不大的情况下,auv潜浮时间占总运行时间的比例较小,可忽略不计,然而,当潜深较大时,auv潜浮时间占总运行时间的比例就非常大。由于auv携带能源有限,采用投影面积小的法线方向进行潜浮,阻力小,推进器提供较小的推力即可达到预期的潜浮速度,大大减少推进器所消耗的能源,进而提升auv在预定深度处的实际作业时间。
4.公开号为cn 110203362 b提出一种改变水下机器人航态的方法及可变航态水下机器人,通过抛弃特殊压载、配合微调重心以及稳定翼辅助的方式,潜水器主体旋转90度,进入同样是阻力最小的水平航行姿态,实现在预定深度的高效率巡航、观测或作业,该种方法抛弃压载后,潜水器瞬间获得旋转力矩,旋转速度不可控,潜水器在旋转90度后会继续旋转一定角度,经过多次摆动才会稳定在旋转90度后的位置。同时,该方法中的压载为一次性使用,每次水下作业均需要配置新的压载,不具备重复使用的能力,增加了下水作业前的准备工作。
技术实现要素:
5.本技术人针对上述现有生产技术中的缺点,提供一种水下无人航行器航姿转换机构及操作方法,从而可以实现auv以可控速度完成姿态转换,且具备重复使用的能力,进而实现auv以阻力最小的方向完成下潜和上浮,减小潜浮过程中的能源消耗,提升auv在预定深度处的实际作业时间。
6.本发明所采用的技术方案如下:
7.一种水下无人航行器航姿转换机构,包括载体框架,所述载体框架的舯部下方位置固定有一号油舱,所述一号油舱的顶面的进出油口通过一号硬管连接油泵,所述油泵再通过二号硬管连接电磁换向阀,所述油泵的一端通过直角型的基座与电磁换向阀连接固定,所述电磁换向阀的顶面固定有连接板,连接板固定在载体框架上,所述电磁换向阀顶面的两个进出油口均穿出连接板,然后分别连接有三号硬管和四号硬管,三号硬管连接二号油舱,四号硬管连接三号油舱。
8.其进一步技术方案在于:
9.一号油舱的结构为:包括一号油舱舱体,一号油舱舱体为圆柱舱体,一号油舱舱体
的两端均设置一号油舱舱盖,一号油舱舱体上设有进出油口,进出油口通过一号硬管与油泵下方进出油口连接,形成油液通路;一号油舱舱体内设置一号油舱软管,一号油舱软管一端在舱内与进出油口连接,另一端管口处设置一号油舱软管滑动支架,一号油舱软管滑动支架两侧设有一号油舱滚轮,一号油舱沿设置在一号油舱舱体内壁的一号油舱导轨移动;在一号油舱舱体202的中间位置对称设置一号油舱限位轮,一号油舱限位轮通过一号油舱限位轮支架与一号油舱舱体内壁连接固定。
10.一号油舱导轨为圆弧形,圆弧的弧度大于180度,一号油舱导轨共两个,并关于一号油舱舱体202中横剖面对称布置。
11.所述二号油舱和三号油舱的结构相同,并对称布置。
12.所述二号油舱通过安装马脚与载体框架固定,二号油舱设置在载体框架的艏部上方。
13.所述三号油舱通过安装马脚与载体框架固定,三号油舱设置在载体框架的艉部上方。
14.所述三号油舱的结构为:包括三号油舱舱体,所述三号油舱舱体的主体为圆柱舱体,三号油舱舱体的两端设置三号油舱舱盖;三号油舱舱体设有进出油口,进出油口通过四号硬管与电磁换向阀连接,形成油液通路;三号油舱舱体内设置三号油舱软管,三号油舱软管的一端在舱内与进出油口连接,另一端管口处设置三号油舱软管滑动支架,三号油舱软管滑动支架两侧设有三号油舱滚轮,三号油舱沿设置在三号油舱舱体内壁的三号油舱导轨移动;在三号油舱舱体的中间位置设置三号油舱限位轮,三号油舱限位轮通过三号油舱限位轮支架与三号油舱舱体内壁连接固定。
15.所述三号油舱导轨为圆弧形,圆弧的弧度大于90度,三号油舱导轨共设置有两个,并关于三号油舱舱体302中横剖面对称布置。
16.电磁换向阀设置有三个进出油口,分别为底部的一号进出油口,顶部的二号进出油口和三号进出油口。
17.一种水下无人航行器航姿转换机构的操作方法,包括如下操作过程:
18.(一)下潜阶段:
19.步骤一:auv由水面平台布放入水,完全没入水中;
20.步骤二:开启电磁换向阀的一号进出油口和二号进出油口,形成一号油舱到二号油舱的油液通路;
21.步骤三:启动油泵,一号油舱内的油液开始向二号油舱转移,随着油液的转移,auv的重心位置发生变化,重心g0将向auv的艏部和顶部移动,当重心移动至g1与浮心b0的连线和auv的纵轴平行时,auv将旋转90度,由水平姿态转换至艏部向下的竖直状态,进入阻力最小的下潜姿态;
22.步骤四:关闭油泵、电磁换向阀的一号进出油口和二号进出油口;
23.步骤五:启动推进器,auv开始下潜;
24.上述过程由auv的控制系统自动控制完成;
25.(二)巡航阶段:
26.步骤一:auv抵达预设深度,关闭推进器;
27.步骤二:开启电磁换向阀的一号进出油口和二号进出油口,形成二号油舱到一号
油舱的油液通路;
28.步骤三:启动油泵,二号油舱内的油液开始向一号油舱转移,随着油液的转移,auv的重心位置发生变化,重心将向初始位置g0移动,当重心恢复至初始位置g0后,auv旋转90度,由艏部向下的竖直状态转换至初始水平姿态,进入阻力最小的巡航姿态;
29.步骤四:关闭油泵、电磁换向阀的一号进出油口和二号进出油口;
30.步骤五:启动推进器,auv开始巡航作业。
31.作为上述技术方案的进一步改进:
32.上述过程由auv的控制系统自动控制完成。
33.关闭推进器;
34.步骤二:开启电磁换向阀的一号进出油口和三号进出油口,形成一号油舱到三号油舱的油液通路;
35.步骤三:启动油泵,一号油舱内的油液开始向三号油舱转移,随着油液的转移,auv的重心位置发生变化,重心g0将向auv的艉部和顶部移动,当重心移动至g1与浮心b0的连线和auv的纵轴平行时,auv将旋转90度,由水平姿态转换至艏部向上的竖直状态,进入阻力最小的上浮姿态;
36.步骤四:关闭油泵、电磁换向阀的一号进出油口和三号进出油口;
37.步骤五:启动推进器,auv开始上浮。
38.本发明的有益效果如下:
39.本发明结构紧凑、合理,操作方便,通过各个油舱、电磁阀、油泵之间的互相配合工作可以方便的实现auv以可控速度完成姿态转换,且具备重复使用的能力,进而实现auv以阻力最小的方向完成下潜和上浮,减小潜浮过程中的能源消耗,提升auv在预定深度处的实际作业时间。
附图说明
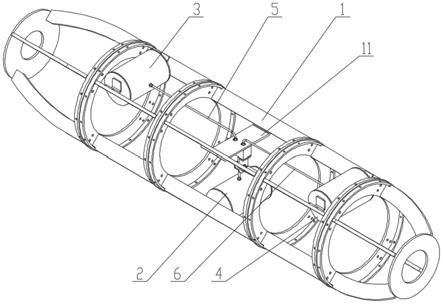
40.图1为本发明水下无人航行器航姿转换机构的示意图。
41.图2为本发明水下无人航行器航姿转换机构的主视图。
42.图3为本发明一号油舱的结构示意图。
43.图4为本发明二号油舱的结构示意图。
44.图5为本发明电磁转向阀的结构示意图。
45.图6为本发明水平巡航状态转换为艏部向下的竖直下潜状态的过程图。
46.图7为本发明水平巡航状态转换为艏部向上的竖直上浮状态的过程图。
47.其中:1、载体框架;2、一号油舱;3、三号油舱;4、二号油舱;5、四号硬管;6、三号硬管;7、电磁换向阀;8、油泵;9、二号硬管;10、一号硬管;11、连接板;12、基座;
48.201、一号油舱舱盖;202、一号油舱舱体;203、一号油舱软管;204、一号油舱限位轮;205、一号油舱限位轮支架;206、一号油舱导轨;207、一号油舱软管滑动支架;208、一号油舱滚轮;
49.301、三号油舱舱盖;302、三号油舱舱体;303、三号油舱软管;304、三号油舱限位轮;305、三号油舱限位轮支架;306、三号油舱导轨;307、三号油舱软管滑动支架;308、三号油舱滚轮;
50.701、一号进出油口;702、二号进出油口;703、三号进出油口。
具体实施方式
51.下面结合附图,说明本发明的具体实施方式。
52.如图1-图7所示,本实施例的水下无人航行器航姿转换机构,包括载体框架1,载体框架1的舯部下方位置固定有一号油舱2,一号油舱2的顶面的进出油口通过一号硬管10连接油泵8,油泵8再通过二号硬管9连接电磁换向阀7,油泵8的一端通过直角型的基座12与电磁换向阀7连接固定,电磁换向阀7的顶面固定有连接板11,连接板11固定在载体框架1上,电磁换向阀7顶面的两个进出油口均穿出连接板11,然后分别连接有三号硬管6和四号硬管5,三号硬管6连接二号油舱4,四号硬管5连接三号油舱3。
53.一号油舱2的结构为:包括一号油舱舱体202,一号油舱舱体202为圆柱舱体,一号油舱舱体202的两端均设置一号油舱舱盖201,一号油舱舱体202上设有进出油口,进出油口通过一号硬管10与油泵8下方进出油口连接,形成油液通路;一号油舱舱体202内设置一号油舱软管203,一号油舱软管203一端在舱内与进出油口连接,另一端管口处设置一号油舱软管滑动支架207,一号油舱软管滑动支架207两侧设有一号油舱滚轮208,一号油舱2沿设置在一号油舱舱体202内壁的一号油舱导轨206移动;在一号油舱舱体202的中间位置对称设置一号油舱限位轮204,一号油舱限位轮204通过一号油舱限位轮支架205与一号油舱舱体202内壁连接固定。
54.一号油舱导轨206为圆弧形,圆弧的弧度大于180度,一号油舱导轨206共两个,并关于一号油舱舱体202中横剖面对称布置。
55.二号油舱4和三号油舱3的结构相同,并对称布置。
56.二号油舱4通过安装马脚与载体框架1固定,二号油舱4设置在载体框架1的艏部上方。
57.三号油舱3通过安装马脚与载体框架1固定,三号油舱3设置在载体框架1的艉部上方。
58.三号油舱3的结构为:包括三号油舱舱体302,三号油舱舱体302的主体为圆柱舱体,三号油舱舱体302的两端设置三号油舱舱盖301;三号油舱舱体302设有进出油口,进出油口通过四号硬管5与电磁换向阀7连接,形成油液通路;三号油舱舱体302内设置三号油舱软管303,三号油舱软管303的一端在舱内与进出油口连接,另一端管口处设置三号油舱软管滑动支架307,三号油舱软管滑动支架307两侧设有三号油舱滚轮308,三号油舱3沿设置在三号油舱舱体302内壁的三号油舱导轨306移动;在三号油舱舱体302的中间位置设置三号油舱限位轮304,三号油舱限位轮304通过三号油舱限位轮支架305与三号油舱舱体302内壁连接固定。
59.三号油舱导轨306为圆弧形,圆弧的弧度大于90度,三号油舱导轨306共设置有两个,并关于三号油舱舱体302中横剖面对称布置。
60.电磁换向阀7设置有三个进出油口,分别为底部的一号进出油口701,顶部的二号进出油口702和三号进出油口703。
61.本实施例的水下无人航行器航姿转换机构的操作方法,包括如下操作过程:
62.(一)下潜阶段:
63.步骤一:auv由水面平台布放入水,完全没入水中;
64.步骤二:开启电磁换向阀7的一号进出油口701和二号进出油口702,形成一号油舱2到二号油舱4的油液通路;
65.步骤三:启动油泵8,一号油舱2内的油液开始向二号油舱4转移,随着油液的转移,auv的重心位置发生变化,重心g0将向auv的艏部和顶部移动,当重心移动至g1与浮心b0的连线和auv的纵轴平行时,auv将旋转90度,由水平姿态转换至艏部向下的竖直状态,进入阻力最小的下潜姿态;
66.步骤四:关闭油泵8、电磁换向阀7的一号进出油口701和二号进出油口702;
67.步骤五:启动推进器,auv开始下潜;
68.上述过程由auv的控制系统自动控制完成;
69.(二)巡航阶段:
70.步骤一:auv抵达预设深度,关闭推进器;
71.步骤二:开启电磁换向阀7的一号进出油口701和二号进出油口702,形成二号油舱4到一号油舱2的油液通路;
72.步骤三:启动油泵8,二号油舱4内的油液开始向一号油舱2转移,随着油液的转移,auv的重心位置发生变化,重心将向初始位置g0移动,当重心恢复至初始位置g0后,auv旋转90度,由艏部向下的竖直状态转换至初始水平姿态,进入阻力最小的巡航姿态;
73.步骤四:关闭油泵8、电磁换向阀7的一号进出油口701和二号进出油口702;
74.步骤五:启动推进器,auv开始巡航作业。
75.上述过程由auv的控制系统自动控制完成。
76.关闭推进器;
77.步骤二:开启电磁换向阀7的一号进出油口701和三号进出油口703,形成一号油舱2到三号油舱3的油液通路;
78.步骤三:启动油泵8,一号油舱2内的油液开始向三号油舱3转移,随着油液的转移,auv的重心位置发生变化,重心g0将向auv的艉部和顶部移动,当重心移动至g1与浮心b0的连线和auv的纵轴平行时,auv将旋转90度,由水平姿态转换至艏部向上的竖直状态,进入阻力最小的上浮姿态;
79.步骤四:关闭油泵8、电磁换向阀7的一号进出油口701和三号进出油口703;
80.步骤五:启动推进器,auv开始上浮。
81.本发明的具体结构和功能如下:
82.本发明一种水下无人航行器航姿转换机构,主要包括一号油舱2、二号油舱4、三号油舱3、油泵8和电磁换向阀7。
83.一号油舱2布置在载体框架1舯部下方,关于载体框架1中纵剖面对称布置,一号油舱舱体202的主体为圆柱舱体,一号油舱舱体202两端设置一号油舱舱盖201,一号油舱2通过安装马脚实现一号油舱2与载体框架1连接固定;一号油舱舱体202设有进出油口,进出油口通过一号硬管10与油泵8下方进出油口连接,形成油液通路;一号油舱2内设置一号油舱软管203,一号油舱软管203一端在舱内与进出油口连接,另一端靠近管口处设置一号油舱软管滑动支架207,一号油舱软管滑动支架207两侧设有一号油舱滚轮208,一号油舱可沿设置在一号油舱舱体202内壁的一号油舱导轨206移动;一号油舱导轨206为圆弧形(圆弧弧度
略大于180度),共两个,关于一号油舱舱体202中横剖面对称布置;在一号油舱舱体202的中间位置对称设置一号油舱限位轮204,一号油舱限位轮204通过一号油舱限位轮支架205与一号油舱舱体202内壁连接固定。通过一号油舱软管滑动支架207、一号油舱导轨206和一号油舱限位轮204的共同作用,可以实现在auv姿态转换过程中,一号油舱软管203的进出油管口始终处于油液的最低位置,保证一号油舱2内的油液可以全部被转移。
84.三号油舱3布置在载体框架1艉部上方,关于载体框架1中纵剖面对称布置,三号油舱舱体302的主体为圆柱舱体,三号油舱舱体302两端设置三号油舱舱盖301,三号油舱3通过安装马脚实现三号油舱3与载体框架1连接固定;三号油舱舱体302设有进出油口,进出油口通过四号硬管5与电磁换向阀7的二号进出油口702连接,形成油液通路;三号油舱3内设置三号油舱软管303,三号油舱软管303一端在舱内与进出油口连接,另一端靠近管口处设置三号油舱软管滑动支架307,三号油舱软管滑动支架307两侧设有三号油舱滚轮308,三号油舱可沿设置在三号油舱舱体302内壁的三号油舱导轨306移动;三号油舱导轨306为圆弧形(圆弧弧度略大于90度),共两个,关于三号油舱舱体302中横剖面对称布置;在三号油舱舱体302的中间位置设置三号油舱限位轮304,三号油舱限位轮304通过三号油舱限位轮支架305与三号油舱舱体302内壁连接固定。通过三号油舱软管滑动支架307、三号油舱导轨306和三号油舱限位轮304的共同作用,可以实现在auv姿态转换过程中,三号油舱软管303的进出油管口始终处于油液的最低位置,保证三号油舱3内的油液可以全部被转移。
85.二号油舱4的组成和结构与三号油舱3相同,通过安装马脚与载体框架1连接固定,进出油口通过三号硬管6与电磁换向阀7的三号进出油口703连接,形成油液通路。
86.三号油舱3布置在载体框架1艏部上方,其组成和结构与一号油舱2基本相同,仅导轨弧度和限位轮数量不同,二号油舱导轨弧度略大于90度,设置一个限位轮。二号油舱4通过安装马脚与载体框架1连接固定,进出油口通过硬管与电磁换向阀7连接,形成油液通路。
87.油泵8通过安装直角型基座12与电磁换向阀7连接固定,通过缆线与auv的能源和控制系统连接,接受控制系统的控制。
88.油泵8设有两个进出油口,下方进出油口通过一号硬管10与一号油舱2连接,上方进出油口通过二号硬管9与电磁换向阀7的一号进出油口701连接,形成油液通路。
89.电磁换向阀7通过连接板11与载体框架1连接固定,通过缆线与auv的能源和控制系统连接,接受控制系统的控制。电磁换向阀7设有三个进出油口,三个进出油口分别通过硬管与油泵8、二号油舱4和三号油舱3连接,通过控制系统可以实现油液转移方向的控制。
90.一种水下无人航行器航姿转换机构的操作方法,主要包括以下过程:
91.(一)下潜阶段:
92.步骤一:auv由水面平台布放入水,完全没入水中;
93.步骤二:开启电磁换向阀7的一号进出油口701和二号进出油口702,形成一号油舱2到二号油舱4的油液通路;
94.步骤三:启动油泵8,一号油舱2内的油液开始向二号油舱4转移,随着油液的转移,auv的重心位置发生变化,重心g0将向auv的艏部和顶部移动,当重心移动至g1与浮心b0的连线和auv的纵轴平行时,auv将旋转90度,由水平姿态转换至艏部向下的竖直状态,进入阻力最小的下潜姿态。在航姿转换过程中,控制系统通过油泵8控制油液的流速,进而控制auv以转动速度,实现auv的平稳转动,避免在目标位置处的摆动,使auv快速进入下潜状态;
95.步骤四:关闭油泵8、电磁换向阀7的一号进出油口701和二号进出油口702;
96.步骤五:启动推进器,auv开始下潜。
97.上述过程由auv的控制系统自动控制完成。
98.(二)巡航阶段:
99.步骤一:auv抵达预设深度,关闭推进器;
100.步骤二:开启电磁换向阀7的一号进出油口701和二号进出油口702,形成二号油舱4到一号油舱2的油液通路;
101.步骤三:启动油泵8,二号油舱4内的油液开始向一号油舱2转移,随着油液的转移,auv的重心位置发生变化,重心将向初始位置g0移动,当重心恢复至初始位置g0后,auv旋转90度,由艏部向下的竖直状态转换至初始水平姿态,进入阻力最小的巡航姿态;
102.步骤四:关闭油泵8、电磁换向阀7的一号进出油口701和二号进出油口702;
103.步骤五:启动推进器,auv开始巡航作业。
104.上述过程由auv的控制系统自动控制完成。
105.(三)上浮阶段:
106.步骤一:auv完成巡航作业后,关闭推进器;
107.步骤二:开启电磁换向阀7的一号进出油口701和三号进出油口703,形成一号油舱2到三号油舱3的油液通路;
108.步骤三:启动油泵8,一号油舱2内的油液开始向三号油舱3转移,随着油液的转移,auv的重心位置发生变化,重心g0将向auv的艉部和顶部移动,当重心移动至g1与浮心b0的连线和auv的纵轴平行时,auv将旋转90度,由水平姿态转换至艏部向上的竖直状态,进入阻力最小的上浮姿态;
109.步骤四:关闭油泵8、电磁换向阀7的一号进出油口701和三号进出油口703;
110.步骤五:启动推进器,auv开始上浮。
111.上述过程由auv的控制系统自动控制完成。
112.以上描述是对本发明的解释,不是对发明的限定,本发明所限定的范围参见权利要求,在本发明的保护范围之内,可以作任何形式的修改。