1.本发明涉及水底搜索技术领域。具体而言,涉及一种辅助水下搜索的智能装置。
背景技术:
2.目前人们对海洋或者江河的底部环境探索日益频繁,各种技术领域包括能源、基建、资源、环保等都有大量的对水体底部进行勘探搜索的需求。而大多数时候,潜水员都需要对划定范围内的水体进行仔细的定点搜索,并在搜索过程中将各种疑点位置和待查点位置记录在案,为后续的搜索研究提供定位标识。然而目前在水底的定位技术方案中,虽然都提出利用gps或者各种导航定位系统对定点的标识技术,然而这些基于大空间范围的电子定位技术,还无法解决细致到0.1米以内的定位,造成当完成一轮搜索后,需要开展第二轮的搜索时还需要花费比较大的时间重新对范围内的定位目识点进行确认。
3.查阅相关的已公开技术方案,cn212483871提出一种水底装备的卫星定位方案,us2021141085提出种水下的光学定位和互感通讯方案,上述两个技术方案相对复杂而且依赖于大型的通讯系统进行设备的定位;cn112433241提出一种利用水上浮标的定位方案,然而无法对水下标识进行识别和定位。故此相关的为水下搜索而设计的技术方案尚待完善。
技术实现要素:
4.本发明的目的在于,使用一种辅助水下搜索的智能装置为水下定位标识提供更可靠的技术解决方案。该智能装置为一种小型可随便携带的电子装置,由潜水员携带并于水底下操作完成定位;并且该智能装置使用机械结构,主动地完成水底下的锚定和针对外部冲击进行主动侦测作进一步的稳定。同时,该智能装置可以进行点对点或点对终端的短距通讯,利用通讯设备更快地实现水下搜索和发现功能。
5.本发明采用如下技术方案:
6.一种辅助水下搜索定位的智能装置,所述智能装置包括定位锚、传感器模块、通讯模块、电池模块及控制模块;所述定位锚用于将所述智能装置固定于水底进行定点工作;所述传感器模块用于监测所述智能装置自身的状态,并将监测数据上传到所述控制模块;所述通讯模块利用无线近距通讯协议进行通讯,用于使多个所述智能装置之间,以及所述智能装置与操作人员之间进行近距通讯;所述电池模块用于为所述智能装置提供电源支持;所述控制模块通过电路连接所述传感器模块、所述通讯模块以及所述电池模块,用于对以上模块的运作进行监测和控制;
7.其中,所述定位锚包括一个压缩空气腔以及一个活塞装置;在所述压缩空气腔内预先注入压缩空气,并使用锁定环将所述活塞装置的活塞锁定;在需要将所述智能装置进行固定定位时,操作人员通过发射装置将所述智能装置射入水体底部的目标位置,并同时释放所述限位环内的锁定环,使所述限位环内的压缩空气释放从而激发所述智能装置射入水底淤泥内,随后所述定位锚的锚定爪展开并抓紧四周的固定物,用于固定所述智能装置;
8.所述定位锚包括多个锚定爪;每个所述锚定爪包括多个爪节;多个所述爪节通过
活动栓组成连杆机构,并且通过驱动其中一个主动爪节,从而使所述锚定爪进行绕定点的张合动作;
9.所述定位锚包括一组驱动装置;所述驱动装置包括微型电机和减速箱;所述驱动装置由所述电池模块提供电源使所述微型电机转动;所述减速箱将电机的动力传递到涡轮杆,并通过所述涡轮杆驱动所述多组锚定爪的张合;
10.所述传感器模块包括陀螺仪传感器和加速度传感器;所述传感器模块监测所述智能装置的姿态包括各方向上的位移加速度以及角速度,并将监测数据实时或者周期性地上传到所述控制模块;
11.所述通讯模块基于近距通讯协议;所述通讯模块支持点对点自组网方式,将范围内处于同一信号频段的所述智能装置进行组网并以去中心化方式进行轮询,以确定网内成员是否保持在线;所述通讯模块的运行状态包括标准状态和休眠状态;在所述标准状态下,所述通讯模块以额定运行功率保持标准的通讯频率、信号强度、收发频次;在所述休眠状态下,所述通述模块降低信号频次并只进行信号接收,同时将信号强度调低,最终将所述通讯模块的运行功率调低;
12.所述电池模块包括可充电化学电池以及电源转换模块;所述电池模块连接所述驱动装置、所述传感器模块、所述通讯模块以及所述控制模块,并且能根据上述各部分需求的电压和功率进行供电;
13.所述控制模块由一组或以上的可编程式单片机组成;所述控制模块通过电路连接所述锚内驱动装置、所述传感器模块、所述通讯模块以及所述电池模块;所述控制模块可以执行以下程序,包括:s1,监测所述陀螺仪数据,判断所述智能装置是否正在被移动;s2,控制所述锚定爪的张合;s3,控制所述通讯模块进行区域范围内的轮询,当检测到应答信号后,与应答的所述智能装置进行握手并将应答的所述智能装置加入局域网;s4,通过检测所述智能装置的活动状态,转换所述智能装置的工作模式;
14.所述定位锚具有一个或以上密封防水的密封腔;所述密封腔包裹所述传感器模块、所述通讯模块、所述电池模块及所述控制模块;所述定锚包括一个配重腔;所述配重腔允许将环境水体引入所述配重腔内部,用于使所述智能装置具备一定质量可以保持在水体底部;进一步的,所述配重腔与所述密封腔相互隔离。
15.本发明所取得的有益效果是:
16.1.本智能装置采用被动和主动式的锚定机构将自身固定于水底,避免随着水流或者水下生物的冲击发生漂移,能在持续时间内提供一个可靠的定位标识;
17.2.本智能装置的电路配合陀螺仪的姿态探查功能,能够在相对稳定的情况下,降低内部各种电子模块的功耗,大大延长了可持续工作时间;
18.3.本智能装置采用了无线短距通讯模块,即使本智能装置定位于较难发现的位置上,也可以通过主动寻回的方式,更有效地实现追踪,明显提高搜索人员的工作效率,节省大量工作时间;
19.4.本智能装置采用了模块化、可编程的设备和零部件,方便今后对系统的维护以及技术升级。
附图说明
20.从以下结合附图的描述可以进一步理解本发明。图中的部件不一定按比例绘制,而是将重点放在示出实施例的原理上。在不同的视图中,相同的附图标记指定对应的部分。
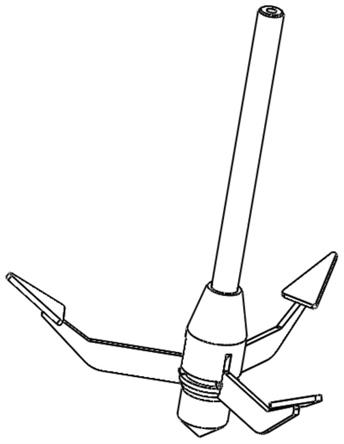
21.图1为本发明的外观示意图;
22.图2为本发明实施例一内部结构示意图;
23.图3为所述锁定环示意图;
24.图4为本发明实施例二的多个锁定环示意图;
25.图5为本发明实施例三的所述智能装置自组网功能示意图;
26.附图标号说明:100-智能装置;101-螺旋头;102-微型电机;103-传动蜗杆;104-定位环;105-第二密封腔;106-活塞;107-锁定环;108-二级减速箱;109-固定底座;110-活动环;111-压缩腔;112-释放腔;113-截止气阀门;201-爪节一;202-爪节二;203-爪节三;204-中间连杆。
具体实施方式
27.为了使得本发明的目的技术方案及优点更加清楚明白,以下结合其实施例,对本发明进行进一步详细说明;应当理解,此处所描述的具体实施例仅用于解释本发明,并不用于限定本发明。对于本领域技术人员而言,在查阅以下详细描述之后,本实施例的其它系统.方法和/或特征将变得显而易见。旨在所有此类附加的系统、方法、特征和优点都包括在本说明书内.包括在本发明的范围内,并且受所附权利要求书的保护。在以下详细描述描述了所公开的实施例的另外的特征,并且这些特征根据以下将详细描述将是显而易见的。
28.本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或组件必须具有特定的方位.以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
29.实施例一:
30.一种辅助水下搜索定位的智能装置,所述智能装置包括定位锚、传感器模块、通讯模块、电池模块及控制模块;所述定位锚用于将所述智能装置固定于水底进行定点工作;所述传感器模块用于监测所述智能装置自身的状态,并将监测数据上传到所述控制模块;所述通讯模块利用无线近距通讯协议进行通讯,用于使多个所述智能装置之间,以及所述智能装置与操作人员之间进行近距通讯;所述电池模块用于为所述智能装置提供电源支持;所述控制模块通过电路连接所述传感器模块、所述通讯模块以及所述电池模块,用于对以上模块的运作进行监测和控制;
31.其中,所述定位锚包括一个压缩空气腔以及一个活塞装置;在所述压缩空气腔内预先注入压缩空气,并使用锁定环将所述活塞装置的活塞锁定;在需要将所述智能装置进行固定定位时,操作人员通过发射装置将所述智能装置射入水体底部的目标位置,并同时释放所述限位环内的锁定环,使所述限位环内的压缩空气释放从而激发所述智能装置射入水底淤泥内,随后所述定位锚的锚定爪展开并抓紧四周的固定物,用于固定所述智能装置;
32.所述定位锚包括多个锚定爪;每个所述锚定爪包括多个爪节;多个所述爪节通过活动栓组成连杆机构,并且通过驱动其中一个主动爪节,从而使所述锚定爪进行绕定点的张合动作;
33.所述定位锚包括一组驱动装置;所述驱动装置包括微型电机和减速箱;所述驱动装置由所述电池模块提供电源使所述微型电机转动;所述减速箱将电机的动力传递到涡轮杆,并通过所述涡轮杆驱动所述多组锚定爪的张合;
34.所述传感器模块包括陀螺仪传感器和加速度传感器;所述传感器模块监测所述智能装置的姿态包括各方向上的位移加速度以及角速度,并将监测数据实时或者周期性地上传到所述控制模块;
35.所述通讯模块基于近距通讯协议;所述通讯模块支持点对点自组网方式,将范围内处于同一信号频段的所述智能装置进行组网并以去中心化方式进行轮询,以确定网内成员是否保持在线;所述通讯模块的运行状态包括标准状态和休眠状态;在所述标准状态下,所述通讯模块以额定运行功率保持标准的通讯频率、信号强度、收发频次;在所述休眠状态下,所述通述模块降低信号频次并只进行信号接收,同时将信号强度调低,最终将所述通讯模块的运行功率调低;
36.所述电池模块包括可充电化学电池以及电源转换模块;所述电池模块连接所述驱动装置、所述传感器模块、所述通讯模块以及所述控制模块,并且能根据上述各部分需求的电压和功率进行供电;
37.所述控制模块由一组或以上的可编程式单片机组成;所述控制模块通过电路连接所述锚内驱动装置、所述传感器模块、所述通讯模块以及所述电池模块;所述控制模块可以执行以下程序,包括:s1,监测所述陀螺仪数据,判断所述智能装置是否正在被移动;s2,控制所述锚定爪的张合;s3,控制所述通讯模块进行区域范围内的轮询,当检测到应答信号后,与应答的所述智能装置进行握手并将应答的所述智能装置加入局域网;s4,通过检测所述智能装置的活动状态,转换所述智能装置的工作模式;
38.所述定位锚具有一个或以上密封防水的密封腔;所述密封腔包裹所述传感器模块、所述通讯模块、所述电池模块及所述控制模块;所述定锚包括一个配重腔;所述配重腔允许将环境水体引入所述配重腔内部,用于使所述智能装置具备一定质量可以保持在水体底部;进一步的,所述配重腔与所述密封腔相互隔离;
39.如附图2,为本实施例的所述智能装置内部结构示意图:所述定位锚由不锈钢或者高分子材料,通过铸造、3d打印或者机加工方式制造;所述定位锚的最前端包括一个圆锥形螺旋头101;所述螺旋头101由加强钢材、石墨合金制造,莫氏硬度在6.5以上;所述螺旋头101外部具有螺旋线轮廓,用于在所述智能装置发射时通过轴向的冲击力和旋转的挤压力作用下,使所述智能装置更容易穿过水底表面进入淤泥内部;所述螺旋头101连接第一密封腔;所述第一密封腔的两端通过密封元件或者机械密封进行密封,防止外部水体进入;
40.进一步的,所述第一密封腔内部固定安装一个微型电机102;所述微型电机102通过电路连接所述电池模块,并由所述电池模块供电驱动运转;所述微型电机102优选地为一种高扭矩减速电机,标准输出转速为109至163转/分钟,输入转速为30000转/分钟,输出扭矩为3000至5000gf
·
cm;所述微型电机102的输出轴连接到一个二级减速箱108,并通过所述二级减速箱108将转速再作降低后,使输出扭短进一步提高;所述二级减速箱108的输出
端连接到传动涡杆103的第一端;所述传动蜗杆103的第二端穿过所述第一密封腔,并由一个定位环104将所述传动蜗杆103的轴向和径向位置固定,但所述传动蜗杆103能够在所述定位环104内平顺转动;
41.进一步的,所述定位环由一个固定底座109固定;所述固定底座109的外圈使用活动栓与所述多个锚定爪的多个爪节一201使用活动栓连接;所述固定底座109的内圈与所述多个锚定爪的多个爪节二202使用活动栓连接;每个所述爪节一201与所述爪节二202的最前端与多个爪节三203通过使用活动栓连接;进一步的,每个所述爪节二的中段位置使用活动栓与多个中间连杆204连接;多个所述中间连杆204使用活动栓与同时与一个活动环110连接;
42.所述传动涡杆103的第二端具有一段带外螺纹的蜗杆段;所述活动环110内表面具有与所述蜗杆段外螺纹吻合的内螺纹,使所述蜗杆段能在所述活动环110内配合旋动;将所述蜗杆段装配入所述活动环内;由此完成一组带有多个可张合所述锚定爪的活动装置;通过所述微型电机102的驱动,动力在提升为高扭矩后输入所述传动蜗杆103的第一段;所述传动蜗杆103转动后,由于其位置被相对固定,所述活动环110在螺纹的传动下,沿所述传动蜗杆103的轴向发生位移从而上下移动;
43.进一步的,所述爪节一201、所述爪节二202、所述爪节三203以及所述中间连杆204组成一组多连杆结构;随着所述活动环的轴向移动,带动所述中间连杆,使所述多个锚定爪做出张、合的动作;
44.所述电池模块、所述传感器模块、所述通讯模块及所述控制模块安装于第二密封腔105内;所述第二密封腔105采用绝缘膜覆盖内表面,并通过上、下两侧密封板将以上电子模块密封保护,防止进水;
45.在所述定位锚的末端包括一个压缩空气腔;所述压缩空气腔内包括一个活塞装置;所述活塞装置包括一个活塞106,优选地包括一个弹性元件;所述活塞106将所述压缩空气腔分为第一段的压缩腔111和第二段的释放腔112;所述活塞的外边缘采用密封材料包裹,使得所述压缩腔111和释放腔112互相气体隔绝;所述压缩腔111包括一个通气阀门(图出未标出),用于在外部使用空气压缩机设备将压缩气体注入所述压缩腔111内,使所述压缩腔111在预装时保持高压状态;所述释放腔112内包括两个以上的锁定环107;所述锁定环107如图3所示,是一种电磁收缩环;所述释放腔112的内壁上具有止口,用于固定所述锁定环107于固定位置;所述锁定环107的卡扣在通电时产生磁力并处于收紧状态,令所述锁定环107保持较小直径;所述锁定环107在撤去电流时,所述卡扣的磁力消失,并且释放所述锁定环107;所述锁定环107通过电路连接所述控制模板并通过所述控制模板控制其通电;通过所述锁定环107的定位作用,使所述活塞106在所述释放腔内有限度发生位移,并释放所述压缩腔111内的压缩气体;
46.进一步的,所述释放腔112顶端包括一个截止气阀门113;所述截止气阀门113具有一个截止压力值;当所述锁定环107的释放后,所述活塞106在所述压缩腔111的膨胀下,向所述释放腔112方向移动并压缩所述释放腔112内气体,直到达到所述截止气阀门113的截止压力值后,所述截止气阀门113打开并将所述释放腔112内气体排出于所述智能装置外部,利用排出气体的反冲作用,使所述智能装置受到向所述螺旋头101方向的冲击力,推动所述智能装置射出。
47.实施例二:
48.本实施例应当理解为至少包含前述任一一个实施例的全部特征,并在其基础上进一步改进;
49.一种辅助水下搜索定位的智能装置,所述智能装置包括定位锚、传感器模块、通讯模块、电池模块及控制模块;所述定位锚用于将所述智能装置固定于水底进行定点工作;所述传感器模块用于监测所述智能装置自身的状态,并将监测数据上传到所述控制模块;所述通讯模块利用无线近距通讯协议进行通讯,用于使多个所述智能装置之间,以及所述智能装置与操作人员之间进行近距通讯;所述电池模块用于为所述智能装置提供电源支持;所述控制模块通过电路连接所述传感器模块、所述通讯模块以及所述电池模块,用于对以上模块的运作进行监测和控制;
50.其中,所述定位锚包括一个压缩空气腔以及一个活塞装置;在所述压缩空气腔内预先注入压缩空气,并使用锁定环将所述活塞装置的活塞锁定;在需要将所述智能装置进行固定定位时,操作人员通过发射装置将所述智能装置射入水体底部的目标位置,并同时释放所述限位环内的锁定环,使所述限位环内的压缩空气释放从而激发所述智能装置射入水底淤泥内,随后所述定位锚的锚定爪展开并抓紧四周的固定物,用于固定所述智能装置;
51.所述定位锚包括多个锚定爪;每个所述锚定爪包括多个爪节;多个所述爪节通过活动栓组成连杆机构,并且通过驱动其中一个主动爪节,从而使所述锚定爪进行绕定点的张合动作;
52.所述定位锚包括一组驱动装置;所述驱动装置包括微型电机和减速箱;所述驱动装置由所述电池模块提供电源使所述微型电机转动;所述减速箱将电机的动力传递到涡轮杆,并通过所述涡轮杆驱动所述多组锚定爪的张合;
53.所述传感器模块包括陀螺仪传感器和加速度传感器;所述传感器模块监测所述智能装置的姿态包括各方向上的位移加速度以及角速度,并将监测数据实时或者周期性地上传到所述控制模块;
54.所述通讯模块基于近距通讯协议;所述通讯模块支持点对点自组网方式,将范围内处于同一信号频段的所述智能装置进行组网并以去中心化方式进行轮询,以确定网内成员是否保持在线;所述通讯模块的运行状态包括标准状态和休眠状态;在所述标准状态下,所述通讯模块以额定运行功率保持标准的通讯频率、信号强度、收发频次;在所述休眠状态下,所述通述模块降低信号频次并只进行信号接收,同时将信号强度调低,最终将所述通讯模块的运行功率调低;
55.所述电池模块包括可充电化学电池以及电源转换模块;所述电池模块连接所述驱动装置、所述传感器模块、所述通讯模块以及所述控制模块,并且能根据上述各部分需求的电压和功率进行供电;
56.所述控制模块由一组或以上的可编程式单片机组成;所述控制模块通过电路连接所述锚内驱动装置、所述传感器模块、所述通讯模块以及所述电池模块;所述控制模块可以执行以下程序,包括:s1,监测所述陀螺仪数据,判断所述智能装置是否正在被移动;s2,控制所述锚定爪的张合;s3,控制所述通讯模块进行区域范围内的轮询,当检测到应答信号后,与应答的所述智能装置进行握手并将应答的所述智能装置加入局域网;s4,通过检测所述智能装置的活动状态,转换所述智能装置的工作模式;
57.所述定位锚具有一个或以上密封防水的密封腔;所述密封腔包裹所述传感器模块、所述通讯模块、所述电池模块及所述控制模块;所述定锚包括一个配重腔;所述配重腔允许将环境水体引入所述配重腔内部,用于使所述智能装置具备一定质量可以保持在水体底部;进一步的,所述配重腔与所述密封腔相互隔离;
58.为进一步使所述智能装置可以深入固定到水底更深位置,本实施例进一步改进所述压缩空气腔结构;在所述释放腔内安装n个所述锁定环;n个所述锁定环具有顺序编号r1,r2……rn
,并能通过所述控制模块指定其中一个或多个所述锁定环进行同时或有序释放,使得所述活塞的具有多级的步进的位移控制;
59.采用顺序释放所述活塞,使所述智能装置在进入水底过程中,产生多次的冲击效果,而不是一次将所述压缩腔内的压缩气体释放完,从而使所述螺旋头101在射放水底的过程中,在冲击力的连续作用下,更有效地穿过坚硬的泥块到达更深深度;
60.进一步的,由所述控制模块控制n个所述锁定环的释放顺序;通过所述传感器模块的传感器监测在每次冲击后的冲击效果,由所述控制模块通过计算,采用自动算法判断在下次释放所述锁定的编号以及具体时刻,产生自动控制效果;为适用于所述自动算法,在所述螺旋头101内部安装加速度传感器以及压力传感器,用于计算所述螺旋头101在冲击力的作用下产生的加速度a以及受到的反作用力f;所述自动算法包括以下步骤:
61.p1,通过实验室计算测定,在所述压缩腔内达到标准压缩气压ps时,单独释放一个所述锁定环可以释放的能量为q0;同时测定的在不同的阻力h下,能量qj可以使所述螺旋头101产生的加速度ah以及位移量mh;并且,测定所述智能装置能够保持足够稳定情况下所需要的来自外围的阻力值hs;
62.p2,在实际操作时,通过由潜水器发射器进行的第一次发射后,计算所述螺旋头101的最大加速度值a0、最大位移量m0以及最大阻力值h0,多过以下公式,计算下次发射所需要的能量值q:
63.当h0<0.5
·hs
:则令q=q0,即进行一次标准释放,并再次监测第二次的阻力值h1,直到第j次释放后,满足:
64.0.5
·hs
≤hj<0.8
·hs
,此时,下次的释放能量值可定为q=k
·
q0,即同时释放k个所述锁定环,以突破较硬的泥块;其中k为阻力校正数,并利用以下公式对k进行计算并取整:
[0065][0066]
公式1统计在前j次的释放冲击中,所述智能装置承受的多个阻力值与标准值的均方差值数据,再乘以校正系数z;所述校正系数可以通过在实验室中进行的多阻力变量值的大数据记录,通过计算机的机器运算取得最优值;若均方差较大,进行保守计算提高后续释放冲击的次数,直到满足阻力的标准值hs。
[0067]
通过以上的多次冲击,使所述智能装置达到稳定状态后,所述控制模块则控制多个所述锚定爪实施展开操作,使多个所述锚定爪伸入到淤泥层中并充分地与周围淤泥接触,从而令所述智能装置完全固定于水底底部;进一步的,所述智能装置即进入标准状态,直至下一步进入休眠状态。
[0068]
实施例三:
[0069]
本实施例应当理解为至少包含前述任一一个实施例的全部特征,并在其基础上进一步改进:
[0070]
一种辅助水下搜索定位的智能装置,所述智能装置包括定位锚、传感器模块、通讯模块、电池模块及控制模块;所述定位锚用于将所述智能装置固定于水底进行定点工作;所述传感器模块用于监测所述智能装置自身的状态,并将监测数据上传到所述控制模块;所述通讯模块利用无线近距通讯协议进行通讯,用于使多个所述智能装置之间,以及所述智能装置与操作人员之间进行近距通讯;所述电池模块用于为所述智能装置提供电源支持;所述控制模块通过电路连接所述传感器模块、所述通讯模块以及所述电池模块,用于对以上模块的运作进行监测和控制;
[0071]
其中,所述定位锚包括一个压缩空气腔以及一个活塞装置;在所述压缩空气腔内预先注入压缩空气,并使用锁定环将所述活塞装置的活塞锁定;在需要将所述智能装置进行固定定位时,操作人员通过发射装置将所述智能装置射入水体底部的目标位置,并同时释放所述限位环内的锁定环,使所述限位环内的压缩空气释放从而激发所述智能装置射入水底淤泥内,随后所述定位锚的锚定爪展开并抓紧四周的固定物,用于固定所述智能装置;
[0072]
所述定位锚包括多个锚定爪;每个所述锚定爪包括多个爪节;多个所述爪节通过活动栓组成连杆机构,并且通过驱动其中一个主动爪节,从而使所述锚定爪进行绕定点的张合动作;
[0073]
所述定位锚包括一组驱动装置;所述驱动装置包括微型电机和减速箱;所述驱动装置由所述电池模块提供电源使所述微型电机转动;所述减速箱将电机的动力传递到涡轮杆,并通过所述涡轮杆驱动所述多组锚定爪的张合;
[0074]
所述传感器模块包括陀螺仪传感器和加速度传感器;所述传感器模块监测所述智能装置的姿态包括各方向上的位移加速度以及角速度,并将监测数据实时或者周期性地上传到所述控制模块;
[0075]
所述通讯模块基于近距通讯协议;所述通讯模块支持点对点自组网方式,将范围内处于同一信号频段的所述智能装置进行组网并以去中心化方式进行轮询,以确定网内成员是否保持在线;所述通讯模块的运行状态包括标准状态和休眠状态;在所述标准状态下,所述通讯模块以额定运行功率保持标准的通讯频率、信号强度、收发频次;在所述休眠状态下,所述通述模块降低信号频次并只进行信号接收,同时将信号强度调低,最终将所述通讯模块的运行功率调低;
[0076]
所述电池模块包括可充电化学电池以及电源转换模块;所述电池模块连接所述驱动装置、所述传感器模块、所述通讯模块以及所述控制模块,并且能根据上述各部分需求的电压和功率进行供电;
[0077]
所述控制模块由一组或以上的可编程式单片机组成;所述控制模块通过电路连接所述锚内驱动装置、所述传感器模块、所述通讯模块以及所述电池模块;所述控制模块可以执行以下程序,包括:s1,监测所述陀螺仪数据,判断所述智能装置是否正在被移动;s2,控制所述锚定爪的张合;s3,控制所述通讯模块进行区域范围内的轮询,当检测到应答信号后,与应答的所述智能装置进行握手并将应答的所述智能装置加入局域网;s4,通过检测所述智能装置的活动状态,转换所述智能装置的工作模式;
[0078]
所述定位锚具有一个或以上密封防水的密封腔;所述密封腔包裹所述传感器模
块、所述通讯模块、所述电池模块及所述控制模块;所述定锚包括一个配重腔;所述配重腔允许将环境水体引入所述配重腔内部,用于使所述智能装置具备一定质量可以保持在水体底部;进一步的,所述配重腔与所述密封腔相互隔离;
[0079]
在使用所述智能装置前,由操作人员对所述智能装置做如下准备,包括:
[0080]
1.将所述活塞装置的活塞部分推回所述空气压缩腔的充气端,并使用所述锁定环将所述活塞的当前位置锁定;
[0081]
2.对所述充气端进行充气加压;使用气压计测量加压时的气压数值,保证所述压缩空气腔内的气压符合使用和安全标准;
[0082]
3.检查所述电池模块是否完成充电以及具有额定电量;
[0083]
4.检查通讯模块的收发信号、组网功能和检索功能;
[0084]
5.将所述多组锚定爪收回并贴近所述定位锚的中央;
[0085]
随后,潜水员将所述智能装置带入水下将行搜索工作;潜水员随身配备一个发射器;所述发射器使用机械弹簧装置,用于将所述智能装置射入水底淤泥内;在潜水员需要对特定位置进行定位标识时,在目标位置处确认一处相对结实的水底平面,例如整块的结实泥块,或者石头掩体周边;潜水员将所述智能装置装入所述发射器,在瞄准目标位置处发射,并使所述智能装置射入水底平面内;随后,潜水员确定所述智能装置射入深度是否足够将所述锚定爪完全覆盖;若射入深度不足,将释放所述锁定环,利用所述压缩空气腔内的压缩空气释放时的反作用力,将所述定位锚进一步射入水底平面内;并且进一步执行如实施例2所述的自动算法,加强所述智能装置的稳定程度;
[0086]
进一步的,在确定所述智能装置已经准确固定于目标位置后,开启所述控制模块开关;由所述控制模块启动所述驱动装置进行工作,将所述多组锚定爪展开直到所述锚定爪与所述定位锚的夹角呈θ0度;进一步的,所述控制模块启动所述传感器模块进行监测;所述传感器模块初始化内部的各个传感器,包括:
[0087]
1.所述陀螺仪确定当前所述智能装置的三轴俯仰角σ
x
、σy、σz;
[0088]
2.所述加速度传感器确认三轴加速度a
x
、ay、az是否为零,即确定所述智能装置处于静止状态;
[0089]
进一步的,启动所述通讯模块开始初始化并进行信号和频段自检;并随着更多的所述智能装置被启动后,进行自组网以及自行加入到局域网内;所述通讯模块可使用指示灯信号,表示各种工作状态例如收发信号正常,组网功能正常等功能,并由潜水员通过所述指示灯信号,确认所述智能装置的通讯功能正常启用;
[0090]
潜水员在完成范围内各目标位置的所述智能装置的定位布置后,可以使用远程终端对其中一台或多台的所述智能装置进行主动通讯请求,以检查本次定位标识工作是否正确完成;
[0091]
进一步的,在水底工作时,所述智能装置通过对自身的稳定程度保持时间进行监测计算,在监测到所述加速度传感器的三轴加速度a
x
、ay、az在持续的时间t内满足:
[0092][0093]
其中λ为稳定度阈值,可以由技术人员通过实验室计算对于特定水域内λ的合理数值,并且由潜水员在预设操作中输入到所述控制器内;一旦所述加速度传感器监测数值超
过稳定度阈值λ,则判别所述智能装置可能存在脱离水底部的异常移动,则进行异常模式的执行,包括以下控制步骤:
[0094]
e1,提高所述加速度传感器的侦测频次,确认所述智能装置的运动状态,例如:
[0095]
1.三轴加速度a
x
、ay、az三项数值在小范围浮动,则所述智能装置固定于原位置的轻微摆动,或者:
[0096]
2.三轴加速度a
x
、ay、az大幅度变化,则所述智能装置已脱离原位置且可能已随水流漂走;
[0097]
e2,当所述加速度传感器处于相对稳定情况下,可以将所述多个锚定爪收起并再次执行实施例2中的所述自动算法;
[0098]
e3,设置处于异常模式的所述智能装置的附近若干个所述智能装置进行加强通讯,并尝试持续确认异常模式的所述智能装置是否仍在通讯可用状态;
[0099]
e4,将异常状态记录在所述控制模块中,以在潜水员再次联接到多个所述智能装置的其中一个时,获取相关异常记录。
[0100]
在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述或记载的部分,可以参见其它实施例的相关描述。
[0101]
虽然上面已经参考各种实施例描述了本发明,但是应当理解,在不脱离本发明的范围的情况下,可以进行许多改变和修改。也就是说上面讨论的方法,系统和设备是示例。各种配置可以适当地省略,替换或添加各种过程或组件。例如,在替代配置中,可以以与所描述的顺序不同的顺序执行方法,和/或可以添加,省略和/或组合各种部件。而且,关于某些配置描述的特征可以以各种其他配置组合,如可以以类似的方式组合配置的不同方面和元素。此外,随着技术发展其中的元素可以更新,即许多元素是示例,并不限制本公开或权利要求的范围。
[0102]
在说明书中给出了具体细节以提供对包括实现的示例性配置的透彻理解。然而,可以在没有这些具体细节的情况下实践配置例如,已经示出了众所周知的电路,过程,算法,结构和技术而没有不必要的细节,以避免模糊配置。该描述仅提供示例配置,并且不限制权利要求的范围,适用性或配置。相反,前面对配置的描述将为本领域技术人员提供用于实现所描述的技术的使能描述。在不脱离本公开的精神或范围的情况下,可以对元件的功能和布置进行各种改变。
[0103]
综上,其旨在上述详细描述被认为是例示性的而非限制性的,并且应当理解,以上这些实施例应理解为仅用于说明本发明而不用于限制本发明的保护范围。在阅读了本发明的记载的内容之后,技术人员可以对本发明作各种改动或修改,这些等效变化和修饰同样落入本发明权利要求所限定的范围。