1.本公开涉及水下航行器技术领域,尤其涉及一种水下航行器的多自由度驱动机构及水下航行器。
背景技术:
2.水下航行器是一种航行于水下的航行体,一般包括载人水下航行器和无人水下航行器。水下航行器可长时间潜入水下,完成水下勘探、侦测、水文测量和海洋学研究等任务。为了完成上述任务,水下航行器需要较高的智能性和灵活性。
3.现有技术中,水下航行器的航行方向受到驱动机构的限制,不能实现全角度航行。这使得水下航行器在执行检测任务时,视角有一定的局限性,影响检测质量。
技术实现要素:
4.有鉴于此,本公开的目的在于提出一种水下航行器的多自由度驱动机构,以解决现有技术中,水下航行器的驱动机构的旋转方向有限,灵活性较差的问题。
5.基于上述目的,本公开提供了水下航行器的多自由度驱动机构,所述水下航行器的多自由度驱动机构安装于水下航行器的主体上,用于调节所述主体的航行方向和航行速度,具体包括:旋转环;旋转驱动器,与所述旋转环传动连接,用于驱动所述旋转环旋转;翻转驱动器,安装于所述旋转环上;翻转件,设置于所述旋转环的内侧,且与所述翻转驱动器传动连接,利用所述翻转驱动器驱动所述翻转件沿所述旋转环的径向翻转;推进器,安装于所述翻转件上。
6.进一步,所述旋转驱动器的输出轴上安装有齿轮,所述旋转环的外壁周圈设有与所述齿轮相啮合的旋转环齿。
7.进一步,还包括安装架,设有安装通孔,所述旋转环转动安装于所述安装通孔内。
8.进一步,所述安装通孔的内壁上周圈设有环槽,所述旋转环齿安装于所述环槽内。
9.进一步,所述环槽设有开口,所述环槽内的所述旋转环齿利用所述开口与所述环槽外的所述齿轮相啮合。
10.进一步,所述安装通孔的内壁上周圈设有环台,所述环台与所述旋转环之间贴合安装有滚动件。
11.进一步,所述翻转件包括:翻转环,与所述翻转驱动器传动连接;安装板,间隙设置于所述翻转环的一侧,所述推进器安装于所述安装板上;连接臂,设有多个分别围绕所述翻转环的轴线均匀分布,且所述连接臂两端分别与所述翻转环和所述安装板固定连接。
12.进一步,所述安装板上设有多个降阻通孔。
13.从上面所述可以看出,本公开提供的水下航行器的多自由度驱动机构,通过旋转环和翻转件协同作用,使推进器实现360
°
全角度旋转。推进器和翻转件均设置于旋转环的内部,使得本公开结构紧凑,在使用过程中可有效减小水体对本公开产生的阻力。
14.本公开的另一个目的在于提出一种水下航行器,以解决现有技术中,水下航行器
由于不能实现全角度换向,造成视角受限的问题。
15.基于上述目的,本公开提供了水下航行器,包括:主体;设置在所述主体上的所述水下航行器的多自由度驱动机构;控制系统,设置在所述主体内部,且与所述水下航行器的多自由度驱动机构电连接,用于控制所述水下航行器的多自由度驱动机构的运行状态;电源,设置在所述主体内部,且与所述水下航行器的多自由度驱动机构电连接,用于为所述水下航行器的多自由度驱动机构提供电能。
16.进一步,还包括至少一对航行翼,每对所述航行翼中的两个所述航行翼分别对称的固定连接于所述主体的两侧;所述航行翼上设有转向通孔,所述转向通孔内安装有安装架。
17.从上面所述可以看出,本公开提供的水下航行器,通过控制系统对水下航行器的多自由度驱动机构进行转向控制,能够实现全角度的换向,增强了本公开的灵活性。
附图说明
18.为了更清楚地说明本公开实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
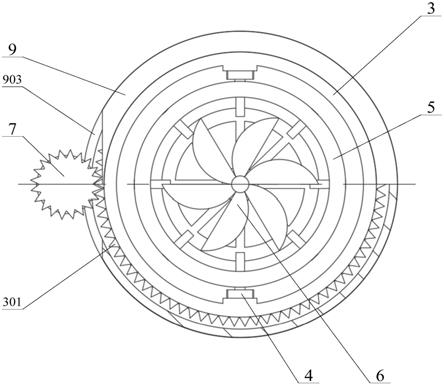
19.图1为本公开实施例所述水下航行器的多自由度驱动机构的俯视向半剖视图;
20.图2为本公开实施例所述水下航行器的多自由度驱动机构的安装架的轴测图;
21.图3为本公开实施例所述水下航行器的多自由度驱动机构的翻转件的轴测图;
22.图4为本公开实施例所述水下航行器的主视向半剖视图示意图;
23.图5为图4中a部分的放大图;
24.图6为本公开实施例所述水下航行器沿倾斜方向航行的轴测图。
25.附图标记说明:
26.1-主体;2-旋转驱动器;3-旋转环;301-旋转环齿;4-翻转驱动器;5-翻转件;501-翻转环;502-安装板;503-连接臂;504-降阻通孔;6-推进器;7
‑ꢀ
齿轮7;8-航行翼;801-转向通孔;9-安装架;901-安装通孔;902-环槽;903
‑ꢀ
开口;904-环台;10-滚动件;11-主推进器。
具体实施方式
27.为使本公开的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本公开进一步详细说明。
28.需要说明的是,除非另外定义,本公开实施例使用的技术术语或者科学术语应当为本公开所属领域内具有一般技能的人士所理解的通常意义。本公开中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
29.如图1和图6所示,本公开实施例提供的水下航行器的多自由度驱动机构,水下航行器的多自由度驱动机构安装于水下航行器的主体1上,用于调节主体1的航行方向和航行速度,具体包括:旋转环3;旋转驱动器2,与旋转环3传动连接,用于驱动旋转环3旋转;翻转驱动器4,安装于旋转环3上;翻转件5,设置于旋转环3的内侧,且与翻转驱动器4传动连接,利用翻转驱动器4驱动翻转件5沿旋转环3的径向翻转;推进器6,安装于翻转件5上。
30.旋转驱动器2和翻转驱动器4均可选用步进电机、伺服电机或舵机,以及其他输出旋转动力的驱动器,且该旋转动力可控制旋转角度。
31.推进器6可选用螺旋桨推进器、喷水推进器或矢量推进器。优选的,推进器6为螺旋桨推进器。螺旋桨推进器能够提供较高的推力,为了获得较高的换向速度,提高本公开的灵活性,因此选用螺旋桨推进器作为本公开的换向动力驱动。
32.当需要调整推进器6的推进方向时,旋转驱动器2带动旋转环3旋转至设定角度,实现推进器6在xy平面(以推进器6的中心为球心建立x,y,z坐标) 内的旋转;翻转驱动器4带动翻转件5翻转至设定角度,实现推进器6在z方向的旋转。至此,推进器6已旋转至需要的任意角度。
33.从上面所述可以看出,本公开提供的水下航行器的多自由度驱动机构,通过旋转环3和翻转件5协同作用,使推进器6实现360
°
全角度旋转。推进器 6和翻转件5均设置于旋转环3的内部,使得本公开结构紧凑,在使用过程中可有效减小水体对本公开产生的阻力。
34.如图1所示,旋转驱动器2的输出轴上安装有齿轮7,旋转环3的外壁周圈设有与齿轮7相啮合的旋转环齿301。通过齿轮传动的方式实现旋转驱动器 2与旋转环3之间的传动连接,简化了传动结构,提高了本公开的传动可靠性,降低了维护难度。
35.如图1、图2和图5所示,水下航行器的多自由度驱动机构还包括安装架 9,设有安装通孔901,旋转环3转动安装于安装通孔901内。旋转环3安装于安装架9上的结构,能够便于操作人员对旋转环3及安装于旋转环3上的零部件进行维护。
36.如图1、图2和图5所示,安装通孔901的内壁上周圈设有环槽902,旋转环齿301安装于环槽902内。环槽902设有开口903,环槽902内的旋转环齿301利用开口903与环槽902外的齿轮7相啮合。该结构一方面能够对旋转环齿301进行保护,另一方面也能实现对旋转环3的轴向定位,保证旋转环3 与齿轮7的有效啮合。
37.如图2和图5所示,安装通孔901的内壁上周圈设有环台904,环台904 与旋转环3之间贴合安装有滚动件10。可选的,滚动件10设有多个,旋转环 3设有多个槽,每个槽内均安装有一个可旋转的滚动件10,滚动件10的一部分露出槽口与环台904贴合。在旋转环3旋转的过程中,滚动件10能够减小旋转环3与环台904之间的摩擦。同时,由于旋转环3通过滚动件10与环台 904接触,也避免了旋转环齿301与环槽902发生摩擦。
38.如图1和图3所示,翻转件5包括:翻转环501,与翻转驱动器4传动连接;安装板502,间隙设置于翻转环501的一侧,推进器6安装于安装板502 上;连接臂503,设有多个分别围绕翻转环501的轴线均匀分布,且连接臂503 两端分别与翻转环501和安装板502固定连接。该结构能够使安装于安装板502 上的推进器6的中心与翻转环501的中心更加接近,一方面使得本公开的结构更加紧凑,另一方面也能够提高推进器6在换向过程中的稳定性。翻转环501 与安装板502之间通过连接臂503固定连接,在本公开航行过程中,水体可通过相邻连接臂503之间的间隙进行流动,能够有效的减少本公开在航行过程中受到的水体阻力。
39.如图3所示,安装板502上设有多个降阻通孔504。在本公开航行过程中,水体可通过降阻通孔504进行流动,该结构能够有效的减少本公开在航行过程中受到的水体阻力。
40.如图4和6所示,本公开实施例提供的水下航行器,包括:主体1;设置在所述主体1上的所述水下航行器的多自由度驱动机构;控制系统,设置在所述主体1内部,且与所述水下航行器的多自由度驱动机构电连接,用于控制所述水下航行器的多自由度驱动机构的运行状态;电源,设置在所述主体1内部,且与所述水下航行器的多自由度驱动机构电连接,用于为所述水下航行器的多自由度驱动机构提供电能。
41.本实施例中的旋转驱动器2、翻转驱动器4和推进器6分别与安装于水下航行器的主体1内的控制系统电连接。控制系统用于控制旋转驱动器2、翻转驱动器4和推进器6的运行状态(即旋转驱动器2和翻转驱动器4的旋转角度,控制推进器6的启停以及转速)。
42.本实施例中的旋转驱动器2、翻转驱动器4和推进器6分别与安装于水下航行器的主体1内的电源电连接。电源用于为旋转驱动器2、翻转驱动器4和推进器6提供电能。
43.如图6所示,可选的,主体1的尾端固定安装有主推进器11。主推进器 11作为航行驱动结构,用于驱动主体1的移动;推进器6可作为转向驱动结构,用于改变主体1的航行方向。
44.可选的,主推进器11可选用螺旋桨推进器、喷水推进器或矢量推进器。
45.如图6所示,当主体1在航行中需要改变方向时,旋转驱动器2带动旋转环3旋转至设定角度,实现推进器6在xy平面(以推进器6的中心为球心建立x,y,z坐标)内的旋转;翻转驱动器4带动翻转件5翻转至设定角度,实现推进器6在z方向的旋转。最后,推进器6启动,输出转向动力,推动主体1 转换到设定的航行方向。
46.从上面所述可以看出,本公开提供的水下航行器,通过控制系统对水下航行器的多自由度驱动机构进行转向控制,能够实现全角度的换向,增强了本公开的灵活性。
47.如图4、图5和图6所示,水下航行器还包括至少一对航行翼8,每对航行翼8中的两个航行翼8分别对称的固定连接于主体1的两侧;航行翼8上设有转向通孔801,转向通孔801内安装有安装架9。
48.成对对称分布的航行翼8能够保持平衡,使主体1在水下航行器的多自由度驱动机构的驱动下平稳换向。
49.安装架9可选用可拆卸的方式安装于转向通孔801内。便于操作人员对水下航行器的多自由度驱动机构进行维护。
50.所属领域的普通技术人员应当理解:以上任何实施例的讨论仅为示例性的,并非旨在暗示本公开的范围(包括权利要求)被限于这些例子;在本公开的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上所述的本公开的不同方面的许多其它变化,为了简明它们没有在细节中提供。
51.本公开的实施例旨在涵盖落入所附权利要求的宽泛范围之内的所有这样的替换、修改和变型。因此,凡在本公开的精神和原则之内,所做的任何省略、修改、等同替换、改进等,均应包含在本公开的保护范围之内。