长期值守型auv海底接驳基站及其非接触式运维系统和方法
技术领域
1.本发明涉及auv海底接驳基站运维方法技术领域,尤其涉及一种长期值守型auv海底接驳基站及其非接触式运维系统和方法。
背景技术:
2.海底接驳基站作为auv的充电站,常布放于海底与海底观测网连接,基站通过海底观测网连接岸基进行供电。随着人们对远海观测需求的增加,作为缆系海底观测网一部分的接驳基站已无法满足对应的观测需求,因此亟需研发一种长期值守、独立供电的海底接驳基站作为auv的充电站。
3.锂电池作为商业上早已成熟的高密度能量来源,被广泛应用于水下设备,但是采用电池供电的接驳基站存在能量耗尽的时刻。将海底接驳基站进行打捞更换电池组所需要的船只成本十分高昂,因此需要研发可行的海底基站电池能源补给方案。
4.申请号为cn201610962200.4的中国专利文献公开了一种基于光伏发电的水下接驳基站,该发电系统十分依赖海面的光照强度,在气候条件不佳时无法正常工作;申请号为cn201410533343.4的中国专利文献公开了一种基于海底洋流发电的海底接驳基站,该系统依赖于高流速海洋环境,而海底流场环境存在较大不确定性,因此以这种方式进行能源补给也存在较大的局限性。
5.海底接驳基站上通常装有水下灯、洋流计、超短基线定位系统等设备用于auv的回坞导引。由于在海底长期驻留,接驳基站上的水下灯玻璃密封壳、声学传感器的唤能器极易被海生物、泥沙覆盖,使设备失效。申请号为cn202020334464.7的中国专利文献公开了一种基于紫外灯照射的防生物附着方法,但是这种方法在实际应用中被证明无法长期有效,且无法解决泥沙等非生物附着问题。
6.综合上述背景分析可知,目前亟需一种长期有效的海底接驳基站电池能量补给方法,并且需要有相对经济、可靠的运维手段来保证海底接驳基站传感器长期可靠工作。
技术实现要素:
7.本发明提供了一种长期值守型auv海底接驳基站及其非接触式运维系统和方法,该auv海底接驳基站采用非接触式电能与信号传输技术,该非接触式运维方法经济、可靠,可保证auv海底接驳基站传感器长期可靠工作。
8.本发明的技术方案如下:一种长期值守型auv海底接驳基站,包括传感器端和固定端;所述的传感器端包括:传感器设备,用于引导auv接驳引导;第一锥形水密线圈,设置在传感器端的底部;第一高频电磁波通讯天线;不锈铁块,设置在传感器端的底部;
所述的传感器端中间镂空,形成贯通顶部与底部的通孔;所述的固定端包括:接驳口,适用于auv入坞;电池组,存储电能并以非接触形式为传感器端以及入坞的auv供电;第二锥形水密线圈,设置在固定端的顶部,与第一锥形水密线圈相配合,用于传感器端与固定端之间的非接触式能量传输;第二高频电磁波通讯天线,与第一高频电磁波通讯天线相配合,用于传感器端与固定端之间的非接触式信息交互;电磁铁,设置在固定端的顶部,通过远程遥控进行启闭,与所述的不锈铁块相配合,用于吸合锁紧传感器端与固定端。
9.传感器端与固定端接驳后,固定端通过第一锥形水密线圈与第二锥形水密线圈为传感器端提供电能,固定端通过第一高频电磁波通讯天线与第二高频电磁波通讯天线将回收的数据传输给传感器端进行存储。
10.本发明的长期值守型auv海底接驳基站通过锥形线圈结构进行接驳,具有良好的位置容错能力;同时非接触式的能量与信号传输方式避免了在海底进行需要精确对准的水密件插拔操作,降低海上作业难度。
11.优选的,所述的第二锥形水密线圈的最大直径为第一锥形水密线圈最大直径的1.5倍以上。
12.所述的传感器设备包括水下灯、超短基线定位系统应答器以及海流计。
13.优选的,所述的电池组输出电能到h桥ac/dc变换器进行调理后,对入坞的auv进行非接触式充电。
14.优选的,所述的接驳口为喇叭口状结构,便于auv入坞。
15.优选的,通过声学通讯设备与超短基线定位系统应答器通讯,远程遥控电磁铁的启闭。
16.本发明还提供了所述的长期值守型auv海底接驳基站的运维系统,包括:浮球,设置有定位系统;导引绳,一端固定在所述的固定端上,穿过所述的传感器端的通孔后,另一端固定在浮球上;承力绳,一端固定在所述的传感器端上,另一端固定在浮球上;充电装置,包括与第二锥形水密线圈相配合的第三锥形水密线圈;所述的充电装置中间镂空,形成贯通顶部与底部的通孔。
17.优选的,所述的运维系统还包括安装在传感器端上的浮力材料,用于调节传感器端的湿重。
18.使用时,浮球漂浮于海面。
19.进一步优选的,通过浮力材料将传感器端的湿重中配置在3kg以内。保证具备稳定下放条件的同时,也能便于水面人员从海底提起。
20.本发明还提供了所述的长期值守型auv海底接驳基站的运维方法,包括传感器端的清洗维护过程与电池组的充电过程;传感器端的清洗维护过程包括:
通过浮球的定位系统找到浮球,远程遥控关闭所述的电磁铁,通过承力绳将传感器端上拉至海面进行清洗维护,并下载传感器端所存储的数据;清洗维护结束后,使承力绳处于松弛状态,传感器端沿导引绳下滑至固定端,通过第一锥形水密线圈与第二锥形水密线圈的容错能力完成传感器端与固定端的接驳;远程遥控开启所述的电磁铁,使传感器端与固定端吸合锁紧;电池组的充电过程包括:将传感器端上拉至海面,将充电装置沿导引绳下放至海底与固定端接驳,充电装置通过海缆从水面船获得电能,并将电能通过第三锥形水密线圈与第二锥形水密线圈对电池组进行非接触式充电;充电结束后,将充电装置上拉至海面,将传感器端下放至海底与固定端接驳后吸合锁紧。
21.与现有技术相比,本发明的有益效果为:(1)本发明的auv海底接驳基站不需要与缆系海底观测网连接进行供电,通过电池组自供电以及定期能量补给,可实现在深、远海海底的长期值守驻留,且该供电系统不受太阳光照、海底洋流等环境因素影响;(2)本发明的auv海底接驳基站进行分离式设计,借助水面浮球以及导引绳,可在海上实现传感器及其相关数据的快速运维与下载,降低海上作业成本;(3)本发明auv海底接驳基站的传感器端和固定端通过锥形线圈结构进行接驳,具有良好的位置容错能力;同时非接触的能量与信号传输方式避免了在海底进行需要精确对准的水密件插拔操作,降低海上作业难度。
附图说明
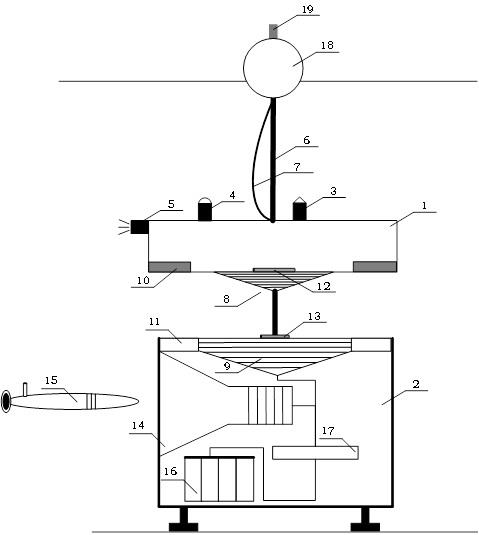
22.图1为海底接驳基站传感器端下放示意图;图2为充电装置下放示意图;图3为系统能量流向示意图。
具体实施方式
23.下面结合附图和实施例对本发明作进一步详细描述,需要指出的是,以下所述实施例旨在便于对本发明的理解,而对其不起任何限定作用。
24.如图1所示,海底接驳基站被设计成包含有传感器端1和固定端2两部分,其中传感器端1安装有auv接驳导引所需要的传感器设备,包含水下灯5、超短基线定位系统应答器4以及海流计3。海底接驳基站的传感器端1的底部安装有锥形水密线圈8,用于传感器端1与固定端2之间的非接触式能量传输;在锥形水密线圈8顶部安装有高频电磁波通讯天线12,用于和基站固定端2进行非接触式信息交互;此外,传感器端1下方安装有不锈铁块10,用于与固定端2的电磁吸合固定。传感器端1中部空间设计为镂空形式,从基站的固定端2上方固连一根导引绳6从中部镂空空间穿出,并从传感器端1上方引出一根承力绳7,两根绳同时与海面浮球18固连,承力绳7另一端固连于传感器端1上方;通过在传感器端1顶部安装浮力材料,将基站传感器端1在水中的湿重配置在3kg以内,保证其具备稳定下放条件的同时,也能便于水面人员从海底提起;
auv海底接驳基站固定端2设计有适用于auv 15入坞的喇叭口结构14。当auv进入到基站内,基站的电池组16输出电能到h桥ac/dc变换器17进行调理,进而基站对auv进行非接触式充电。海底接驳基站固定端2的正上方设计有与锥形水密线圈8相配合的锥形水密线圈9,且最大直径为基站传感器端1锥形水密线圈8的1.5倍;基站固定端2的通讯天线13与传感器端1以相同的形式与方位安装。当基站传感器端1沿着导引绳6与固定端2完成非接触接驳后(即传感器端1的线圈8落在固定端2线圈9内任意空间内),基站传感器端1的传感器设备通过固定端2以非接触形式获取电能,同时将基站回收的数据以非接触的形式传输给传感器端1进行记录;当海底接驳基站传感器端1需要清洗维护时,运维人员通过浮球上的北斗天线19返回的位置信息寻找浮球,并通过声学通讯释放海底接驳基站的电磁铁11,使固定端1与传感器端2松开;接着在海面脱开浮球,通过承力绳7将传感器端1上拉至海面进行运维,同时将导引绳6绑于水面船上;在运维结束后,将导引绳6松开再次穿入传感器端1中间部位,同时向上拉紧导引绳6,使承力绳7处于松弛状态,让传感器端1沿着导引绳缓6慢下滑至接驳基站的海底固定端2,通过锥形线圈的容错能力完成固定端2与传感器端1的接驳;最后通过母船上搭载的声学通讯设备与超短基线定位系统应答器4通讯,触发电磁铁11将上下两端吸合锁紧,最后捆绑浮球18。
25.当海底接驳基站的电池组16能量不足无法对auv充电或对传感器供电时,需要对海底固定端1的电池组16进行充电。如图2所示,首先将传感器端1上拉至海面,并将充电装置20沿着导引绳6缓慢下放至海底与固定端2进行接驳,充电装置20通过海缆21从水面船22获得电能,从而将能量通过线圈传递至海底固定端2,接着调理后输入基站电池组16。
26.因此,本发明提出的海底接驳基站系统能量流向如图3所示:当海底接驳基站正常工作时,基站电池组16能量分两路输出,一路给基站喇叭口线圈,用于给auv充电,另一路输出给传感器端1,用于给外设供电;当海底接驳基站能量不足时,母船输出能量通过海缆给到充电装置线圈,之后经过电能调理给到基站电池。因此在系统中,海底接驳基站固定端2的线圈具有双向传能功能。
27.当海底基站电池完成充电后,船上人员将充电装置上拉至海面回收,接着将导引绳6再次穿入传感器端1中间部位,同时向上拉紧导引绳6,使传感器端沿着导引绳6缓慢下滑至接驳基站的海底固定端,最后通过声学通讯装置触发电磁铁将两者再次吸合锁紧,并将浮球与导引绳、承力绳捆绑。
28.以上所述的实施例对本发明的技术方案和有益效果进行了详细说明,应理解的是以上所述仅为本发明的具体实施例,并不用于限制本发明,凡在本发明的原则范围内所做的任何修改、补充和等同替换等,均应包含在本发明的保护范围之内。