1.本发明涉及浮式建筑物,尤其涉及一种半潜式钻井平台系统及控制方法,属于海洋工程装备领域。
背景技术:
2.随着国家海洋强国战略的不断推进,各类高端海洋工程装备得到重要发展。海洋油气资源勘探和开发能够有效解决陆地油气短缺的问题。目前用于海洋油气资源勘探的装备主要包括钻井探勘船、自升式钻井平台和半潜式钻井平台。其中钻井探勘船通常用于海洋资源前期勘探和科学考察,无法开展海洋油气资源的开发和生产作业。自升式钻井平台通常适用于浅海作业环境,难以适应深海作业环境及恶劣海况的要求。半潜式钻井平台具有良好的稳定性和机动性,依靠潜入海面一定深度的浮箱和支撑设备使钻井平台及钻井设备在海面保持稳定作业。目前半潜式钻井平台逐步成为深海油气资源勘探和开发的重要依托。
3.考虑半潜式钻井平台通常工作在海浪及风浪环境中,钻井甲板上方各类设备通常随海浪起伏震荡,不仅影响海洋平台工作人员工作和生活状态,更极易造成各类安全生产事故。同时在油气资源勘探过程中,通常需要保持钻进设备末端与海底井口稳定接触,海浪起伏带来的波动为半潜式钻井平台可靠运行带来挑战。目前各类钻井平台自身具有百吨和千吨级负载,如何通过改善和优化半潜式海洋平台结构及控制方法,进而提升半潜式钻井平台的稳定性和可靠性已成为一项重要研究议题。
4.在半潜式钻井平台结构优化和控制方面,国内外专家已给出重要案例并开展了有益探索。如美国专利:一种低运动半潜式海洋平台,专利号:us2019/0031291a1,它包括环形浮筒、甲板箱和立柱等,给出了环形浮筒和立柱具体构造形式和连接关系,通过在支柱设置水室,该专利能够一定程度抑制半潜式海洋平台的纵摇运动。如中国专利:一种深水半潜式钻井平台,专利号:cn101954959b,它包括浮箱、立柱、横撑杆和主甲板,采用锚泊定位和动力定位组合定位系统,锚泊定位系统由布置在主甲板左、右舷的前、后4组锚机组成,每组锚机配有3根锚链,动力定位系统由设置在两浮箱的底部前、后四个角落的8台360
°
全回转的动力推进器组成。该发明可实现主甲板横摇和纵摇补偿。中国专利:一种深水半潜式钻井平台的海浪补偿装置的控制方法,专利号:cn105253264b,它包括:连接下船体三个刚性立柱,刚性立柱通过球铰连接有液压缸,液压缸的活塞杆端部与上工作台通过轴承连接,通过控制三个液压缸伸缩补偿上平台主垂荡、横摇和纵摇运动。
5.上述发明涉及的半潜式钻井平台及控制方法各具特点,但现有半潜式钻井平台不具备应对海洋环境中海浪位置和姿态的综合摇摆的能力,无法实现对海浪横移、纵移、垂荡和横摇、纵摇及艏摇的综合补偿。如何在满足系统承载性能要求前提下,通过构型优化及有效控制实现半潜式海洋平台对海浪的补偿成为提升系统综合性能的瓶颈。
技术实现要素:
6.本发明所要解决的技术问题是提供一种具有位姿补偿能力的半潜式钻井平台系统及控制方法,从而实现在恶劣海况条件下对半潜式钻井平台横移、纵移、垂荡和横摇、纵摇及艏摇的综合补偿,保持钻井平台的平稳可靠运行。
7.本发明的目的是通过以下技术方案来实现的,一种具有位姿补偿能力的半潜式钻井平台系统,包括浮箱、承载横梁、刚性支柱、位姿调整系统、海浪识别模块、数据处理单元、控制和驱动模块、钻井平台甲板,所述浮箱为两个,两个浮箱均为长方体结构,且并列设置在半潜式钻井平台下方且悬浮于海水中,作用是依靠浮力使钻井平台甲板及附属设备漂浮于海面上方,
8.所述承载横梁为两个,两个承载横梁均为长方体结构,且并列设置在两个浮箱上,所述两个浮箱与两个承载横梁成“井”字型,承载横梁用于连接浮箱与刚性支柱,承载横梁能够将浮箱浮力传递到刚性支柱及半潜式钻井平台,
9.所述刚性支柱为六个,六个刚性支柱均为圆柱体结构,所述刚性支柱的轴心分布呈特定外接圆圆周,所述其中一个刚性支柱的轴心点到外接圆圆心与相邻的两个刚性支柱的轴心到外接圆圆心形成的夹角分别为100
°
和20
°
,六个刚性支柱形成三组分别设置在两个承载横梁上,三组刚性支柱保证承载力均匀分布,刚性支柱用于承载半潜式钻井平台,
10.所述刚性支柱上设有位姿调整系统,位姿调整系统包括下轴承座、下虎克铰、推力轴承、直线运动单元、上虎克铰、上轴承座,直线运动单元包括缸筒和缸柱,直线运动单元缸筒及钢柱能够实现径向伸缩,所述下轴承座设置于刚性支柱上,下虎克铰垂直设置在下轴承座上,所述下虎克铰与下轴承座组成轴线相互垂直的转动关节,所述下虎克铰上设有推力轴承,推力轴承上连接直线运动单元一端,直线运动单元的另一端连接上虎克铰,上虎克铰垂直连接上轴承座,上虎克铰与上轴承座组成轴线相互垂直的转动关节,所述上轴承座与钻井平台甲板固定连接,
11.所述钻井平台系统还包括海浪识别模块、数据处理单元、控制和驱动模块,所述海浪识别模块包括陀螺仪和声学波浪测试仪,所述陀螺仪和声学波浪测试仪设置在承载横梁上,所述声学波浪测试仪用于测定海浪流向、流速及浪高数据,所述陀螺仪用于测量浮箱相对钻井平台甲板的位置和姿态,
12.所述数据处理单元对海浪识别模块得到的数据进行处理,根据海浪及浮箱位姿数据求解直线运动单元驱动数据,
13.所述控制和驱动模块根据所述数据处理单元得到的直线运动单元驱动数据,驱动所述直线运动单元移动,实现所述半潜式钻井平台对海浪横移、纵移、垂荡和横摇、纵摇及艏摇的综合补偿,
14.所述钻井平台甲板上方用于安装钻井设备和人员活动。
15.优选的,所述直线运动单元为液压缸或电动缸,直线运动单元缸筒及钢柱能够实现径向伸缩。
16.优选的,所述钻井平台甲板为方形,用于连接位姿调整系统,钻井平台甲板上方用于安装钻井设备和人员活动。
17.一种具有位姿补偿能力的半潜式钻井平台系统的控制方法,其特征是,包括以下步骤:
18.步骤1:依据半潜式钻井平台结构特征基于关节空间建立系统动力学方程其中τ表示关节驱动力矩阵,表示系统质量矩阵,表示科氏力和离心力矩阵,表示重力矩阵,表示直线运动单元加速度,表示直线运动单元速度,q
d
表示直线运动单元位移;
19.步骤2:海浪识别模块的陀螺仪测量初始状态浮箱坐标系o
‑
x1y1z1相对钻井平台甲板的坐标系o
‑
x0y0z0位置和姿态;
20.步骤3:海浪识别模块的声学波浪测试仪测定海浪流向、流速及浪高数据;
21.步骤4:数据处理单元将海浪信息转换为浮箱期望位置和姿态数据,浮箱位置和姿态数据采用位姿矩阵表示r0为浮箱姿态矩阵,p0=(a,b,c)
′
为浮箱位置矩阵,其中a表示浮箱横移量,b表示浮箱纵移量,c表示浮箱垂荡量;
22.步骤5:将识别得到的浮箱期望位置和姿态数据与浮箱初始状态位置和姿态数据进行对比,求解浮箱由初始坐标系o
‑
x1y1z1变化到期望坐标系o
‑
x2y2z2时直线运动单元需要变化的长度,通过位置反解求解直线运动单元驱动器需要移动的长度l
i
(i=1,2,
…
6);
23.步骤6:控制和驱动模块根据数据处理单元解算得到的直线移动单元位移,基于关节空间逆动力学控制算法求解半潜式钻井平台驱动单元驱动力τ,直线运动单元移动使浮箱与识别得到的海浪位置和姿态保持一致;
24.步骤7:重复步骤1
‑
6,半潜式钻井平台系统对海浪实时测量和补偿,实现对海浪横移、纵移、垂荡和横摇、纵摇及艏摇的综合补偿。
25.优选的,所述步骤4中姿态矩阵的具体计算方法为:采用rpy角来描述浮箱位姿,首先绕浮箱初始位置的坐标系x轴旋转角度α,再绕y轴旋转β,最后绕z轴旋转γ,上述旋转变换均绕固定坐标系进行,遵循矩阵左乘法则,浮箱的姿态矩阵可以表示为
[0026][0027]
优选的,所述步骤6中基于关节空间的逆动力学控制方法为:
[0028]
所述数据处理单元比较直线运动单元实际位移q(t)与直线运动单元理想位移q
d
(t)的误差差值e
x
,误差差值e
x
与控制器增益k
d
s+k
p
乘积得到增益力项,将增益力项与直线运动单元理想加速度项相加,再与系统质量矩阵相乘,由科氏力和离心力矩阵与直线运动单元理想速度及重力项组合得到系统修正力τ
fl
,将修正力项τ
fl
与前述与增益力项相关数的据合为半潜式钻井平台直线运动单元驱动力τ,考虑所述半潜式钻井平台系统在外界扰动τ
d
的影响,经过基于关节空间的逆动力学控制算法实现对半潜式钻井平台横移、纵移、垂荡和横摇、纵摇及艏摇的综合补偿。
[0029]
本发明具有以下技术效果:本发明是一种具有位姿补偿能力的半潜式钻井平台系统及控制方法,半潜式钻井平台浮箱可随海浪到达空间任意位置和姿态,实现恶劣海况条件下对半潜式钻井平台横移、纵移、垂荡和横摇、纵摇及艏摇的综合补偿,实现钻井平台甲板人员及设备稳定运行。
[0030]
本发明中的具有位姿补偿能力的半潜式钻井平台系统采用六组直线运动单元作
为驱动,具有承载性能好和稳定性强的特点,有利于提升半潜式钻井平台系统整体性能。
[0031]
本发明中具有位姿补偿能力的半潜式钻井平台基于关节空间的逆动力学控制方法,考虑了半潜式钻井平台自身结构和质量特性,具有运动控制精度高和实时性强的特点,实现半潜式钻井平台系统对海浪运动的精确补偿。
附图说明
[0032]
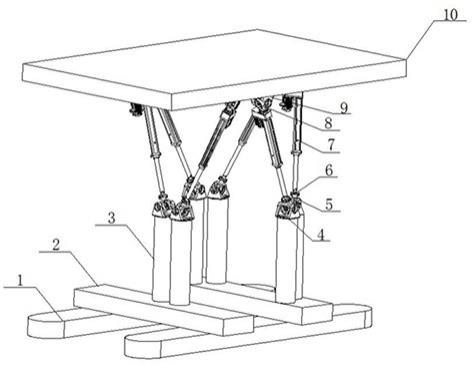
图1为本发明一种具有位姿补偿能力的半潜式钻井平台系统结构示意图。
[0033]
图2为本发明一种具有位姿补偿能力的半潜式钻井平台海浪运动坐标系示意图。
[0034]
图3为本发明的半潜式钻井平台垂荡补偿示意图。
[0035]
图4为本发明的半潜式钻井平台横移补偿示意图。
[0036]
图5为本发明的半潜式钻井平台纵移补偿示意图。
[0037]
图6为本发明的半潜式钻井平台艏摇补偿示意图。
[0038]
图7为本发明的半潜式钻井平台横摇补偿示意图。
[0039]
图8为本发明的半潜式钻井平台纵摇补偿示意图。
[0040]
图9为本发明的半潜式钻井平台位姿调整系统与刚性支柱连接端布局图。
[0041]
图10为本发明的半潜式钻井平台位姿调整系统与甲板连接端布局图。
[0042]
图11为本发明实施例所述的一种具有位姿补偿能力的半潜式钻井平台系统控制方法的流程示意图。
[0043]
图12为本发明的基于关节空间的逆动力学控制原理图。
[0044]
图13为本发明的海浪识别模块的结构示意框图。
[0045]
图14为本发明的横移、纵移、垂荡运动补偿误差。
[0046]
图15为本发明的横摇、纵摇、艏摇运动补偿误差。
[0047]
图中:1浮箱、2承载横梁、3刚性支柱、4下轴承座、5下虎克铰、6推力轴承、7直线运动单元、8上虎克铰、9上轴承座、10钻井平台甲板、11陀螺仪、12声学波浪测试仪、13数据处理单元、14控制和驱动模块。
具体实施方式
[0048]
下面结合附图,详细描述本发明的具体实施方案。
[0049]
如图1所示,一种具有位姿补偿能力的半潜式钻井平台系统,包括浮箱1、承载横梁2、刚性支柱3、位姿调整系统、海浪识别模块、数据处理单元13、控制和驱动模块14、钻井平台甲板10。
[0050]
浮箱1为两个,两个浮箱1均为长方体结构,且并列设置在半潜式钻井平台下方且悬浮于海水中,作用是依靠浮力使钻井平台甲板及附属设备漂浮于海面上方。
[0051]
承载横梁2为两个,两个承载横梁2均为长方体结构,且并列设置在两个浮箱1上,所述两个浮箱1与两个承载横梁2成“井”字型,承载横梁2用于连接浮箱1与刚性支柱3,承载横梁2能够将浮箱1浮力传递到刚性支柱3及半潜式钻井平台。
[0052]
刚性支柱3为六个,六个刚性支柱3均为圆柱体结构,刚性支柱3用于承载半潜式钻井平台,如图9和10所示,刚性支柱3的轴心分布呈特定外接圆圆周,所述其中一个刚性支柱3的轴心点到外接圆圆心与相邻的两个刚性支柱3的轴心到外接圆圆心形成的夹角分别为
100
°
和20
°
,六个刚性支柱3形成三组分别设置在两个承载横梁2上,,三组刚性支柱3保证承载力均匀分布。
[0053]
刚性支柱3上设有位姿调整系统,位姿调整系统包括下轴承座4、下虎克铰5、推力轴承6、直线运动单元7、上虎克铰8、上轴承座9,直线运动单元7采用液压缸或电动缸,直线运动单元7包括缸筒和缸柱,下轴承座4置于刚性支柱3上,如图9所示,下虎克铰5垂直设置在下轴承座4上,下虎克铰5与下轴承座4组成轴线相互垂直的转动关节,所述下虎克铰5上设有推力轴承6,推力轴承6与直线运动单元7连接,直线运动单元7缸筒及缸柱能够实现径向伸缩,如图10所示,直线运动单元7缸筒末端通过上虎克铰8与上轴承座9组成两组轴线相互垂直的转动关节,上轴承座9与钻井平台甲板10固定连接。
[0054]
如图13所示,海浪识别模块包括陀螺仪11和声学波浪测试仪12,陀螺仪11和声学波浪测试仪12设置在承载横梁2上,声学波浪测试仪12用于测定海浪流向、流速及浪高数据,陀螺仪11用于测量浮箱1相对钻井平台甲板10的位置和姿态。
[0055]
数据处理单元13对海浪识别模块得到的数据进行处理,根据海浪及浮箱1位姿数据求解直线运动单元7驱动数据。
[0056]
控制和驱动模块14根据数据处理单元13得到的直线运动单元7驱动数据,驱动直线运动单元7移动,实现所述半潜式钻井平台对海浪横移、纵移、垂荡和横摇、纵摇及艏摇的综合补偿。
[0057]
钻井平台甲板10呈方形用于连接位姿调整系统,钻井平台甲板10上方用于安装钻井设备和人员活动。
[0058]
如图11所示,本发明提供一种具有位姿补偿能力的半潜式钻井平台系统的控制方法,包括以下步骤:
[0059]
步骤1:依据半潜式钻井平台结构特征基于关节空间建立系统动力学方程其中τ表示关节驱动力矩阵,表示系统质量矩阵,表示科氏力和离心力矩阵,表示重力矩阵,表示所述直线运动单元7加速度,表示所述直线运动单元7速度,q
d
表示直线运动单元7位移;
[0060]
步骤2:海浪识别模块的陀螺仪11测量初始状态浮箱1坐标系o
‑
x1y1z1相对钻井平台甲板10的坐标系o
‑
x0y0z0位置和姿态;
[0061]
步骤3:海浪识别模块的声学波浪测试仪12测定海浪流向、流速及浪高数据;
[0062]
步骤4:数据处理单元13将海浪信息转换为浮箱1期望位置和姿态数据,浮箱1位置和姿态数据采用位姿矩阵表示r0为浮箱1姿态矩阵,p0=(a,b,c)
′
为浮箱1位置矩阵,其中a表示浮箱1横移量,如图4所示;b表示浮箱1纵移量,如图5所示;c表示浮箱1垂荡量,如图3所示;
[0063]
步骤5:将识别得到的浮箱1期望位置和姿态数据与浮箱1初始状态位置和姿态数据进行对比,求解浮箱1由初始坐标系o
‑
x1y1z1变化到期望坐标系o
‑
x2y2z2时直线运动单元7需要变化的长度,通过位置反解求解直线运动单元7驱动器需要移动的长度l
i
(i=1,2,
…
6);
[0064]
步骤6:控制和驱动模块14根据数据处理单元13解算得到的直线移动单元7位移,
基于关节空间逆动力学控制算法求解半潜式钻井平台驱动单元驱动力τ,直线运动单元7使浮箱1与识别得到的海浪位置和姿态保持一致;
[0065]
步骤7:重复步骤1
‑
6,半潜式钻井平台系统对海浪实时测量和补偿,实现对海浪横移、纵移、垂荡和横摇、纵摇及艏摇的综合补偿。
[0066]
所述步骤4中姿态矩阵的具体计算方法为:采用rpy角来描述浮箱位姿,首先绕浮箱初始位置的坐标系x轴旋转角度α,再绕y轴旋转β,最后绕z轴旋转γ,上述旋转变换均绕固定坐标系进行,遵循矩阵左乘法则,浮箱的姿态矩阵可以表示为
[0067][0068]
所述步骤6中基于关节空间的逆动力学控制方法为:
[0069]
如图12所示,数据处理单元13比较直线运动单元7实际位移q(t)与直线运动单元7理想位移q
d
(t)的误差差值e
x
,误差差值e
x
与控制器增益k
d
s+k
p
乘积得到增益力项,将增益力项与直线运动单元7理想加速度项相加,再与系统质量矩阵相乘,由科氏力和离心力矩阵与直线运动单元7理想速度及重力项组合得到系统修正力τ
fl
,将修正力项τ
fl
与增益力项合为半潜式钻井平台直线运动单元7驱动力τ,考虑所述半潜式钻井平台系统在外界扰动τ
d
的影响,经过基于关节空间的逆动力学控制算法实现对半潜式钻井平台横移、纵移、垂荡和横摇、纵摇及艏摇的综合补偿。
[0070]
如图14位本发明一种具有位姿补偿能力的半潜式钻井平台系统及控制方法对海浪横移、纵移、垂荡运动补偿误差;如图15为本发明一种具有位姿补偿能力的半潜式钻井平台系统及控制方法对海浪横摇、纵摇艏摇运动补偿误差。
[0071]
最后应说明的是:以上所述的各实施例仅用于说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或全部技术特征进行等同替换;而这些修改或替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。